
雷达点云数据处理方法、装置、设备以及存储介质.pdf

猫巷****奕声

1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

雷达点云数据处理方法、装置、设备以及存储介质.pdf
本公开提供了雷达点云数据处理的方法、装置、设备以及存储介质,涉及雷达点云、自动驾驶、深度学习技术领域。具体实现方案为:利用雷达点云数据中的目标检测框,确定目标物体所处的目标位置区域;将处于目标位置区域内的目标物体的每个点从雷达点云数据中移除;将物体模型添加到目标位置区域。本公开的实施例,通过将目标物体从雷达点云数据中移除,并将需要的三维模型添加到雷达点云数据中的目标位置区域,可以得到更加丰富的雷达点云数据。
激光雷达点云的投影方法、装置、设备及存储介质.pdf
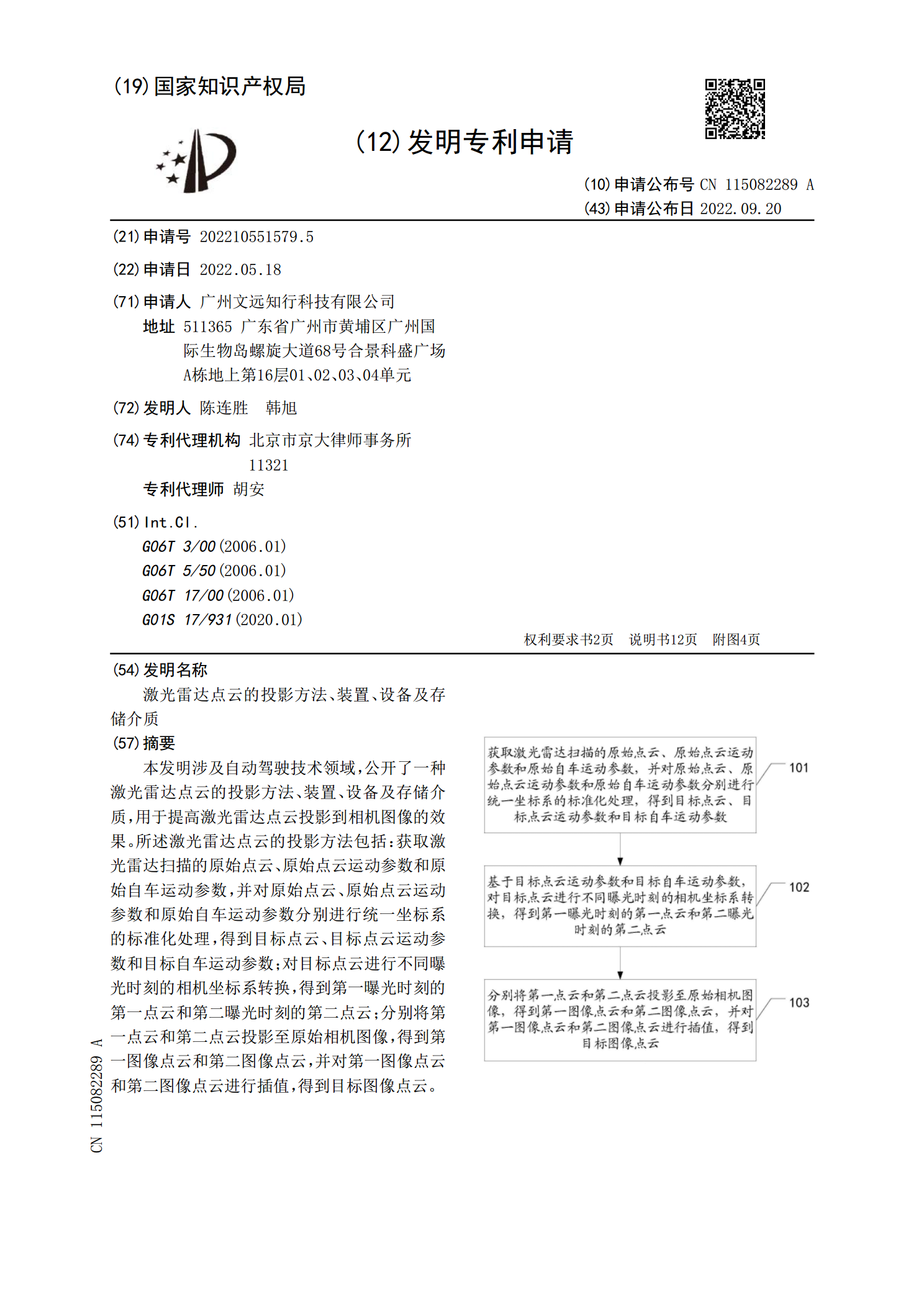
本发明涉及自动驾驶技术领域,公开了一种激光雷达点云的投影方法、装置、设备及存储介质,用于提高激光雷达点云投影到相机图像的效果。所述激光雷达点云的投影方法包括:获取激光雷达扫描的原始点云、原始点云运动参数和原始自车运动参数,并对原始点云、原始点云运动参数和原始自车运动参数分别进行统一坐标系的标准化处理,得到目标点云、目标点云运动参数和目标自车运动参数;对目标点云进行不同曝光时刻的相机坐标系转换,得到第一曝光时刻的第一点云和第二曝光时刻的第二点云;分别将第一点云和第二点云投影至原始相机图像,得到第一图像点云和

激光雷达点云的投影方法、装置、设备及存储介质.pdf
本发明涉及自动驾驶技术领域,公开了一种激光雷达点云的投影方法、装置、设备及存储介质,用于提高激光雷达与相机信息融合的准确度。所述激光雷达点云的投影方法包括:获取激光雷达扫描的原始点云,并对原始点云进行运动畸变去除,得到第一点云;基于原始相机图像的目标曝光时刻,将第一点云转换至相机坐标系,得到第二点云;对第二点云进行相机运动畸变添加,得到目标点云,并将目标点云投影至原始相机图像。
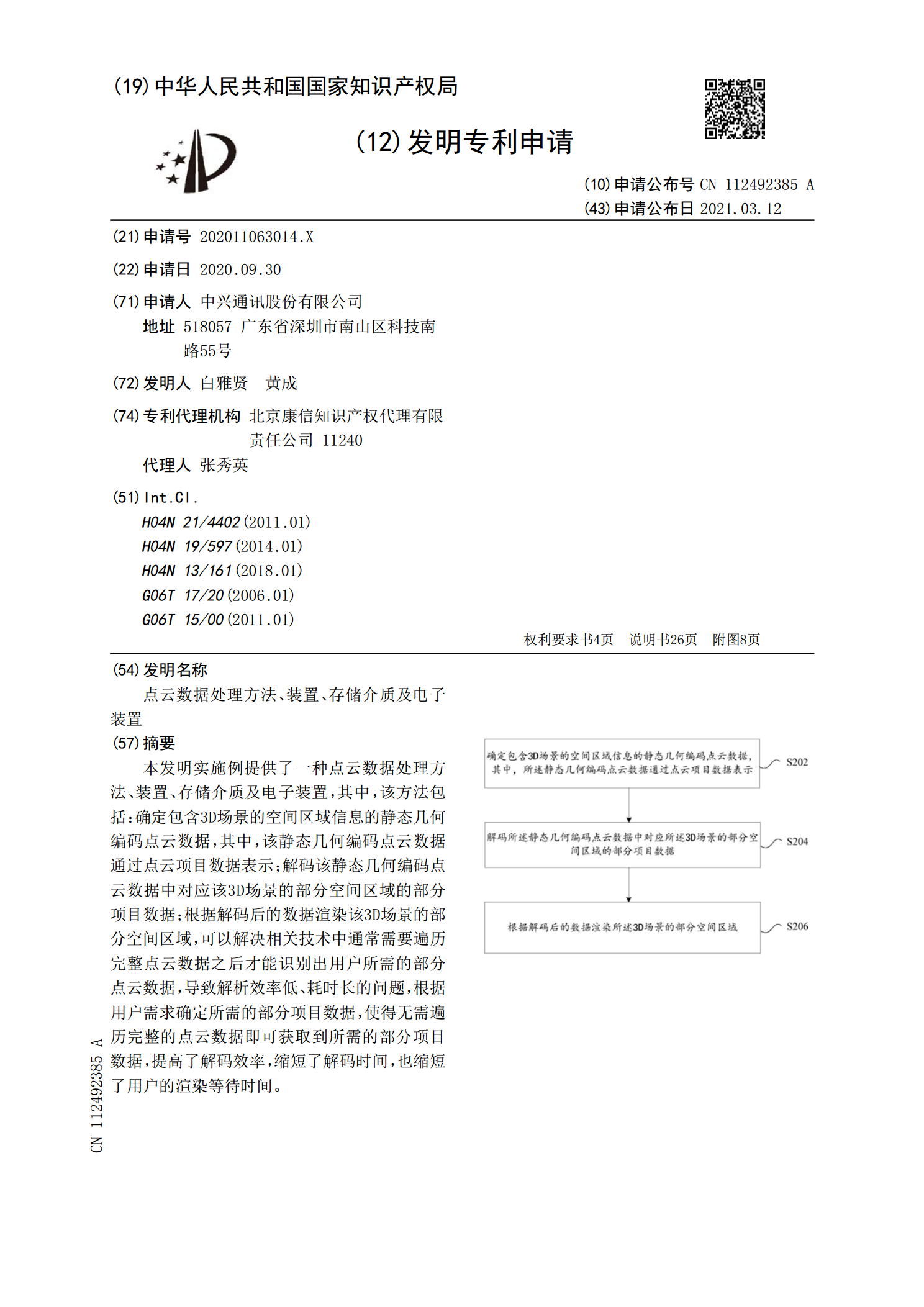
点云数据处理方法、装置、存储介质及电子装置.pdf
本发明实施例提供了一种点云数据处理方法、装置、存储介质及电子装置,其中,该方法包括:确定包含3D场景的空间区域信息的静态几何编码点云数据,其中,该静态几何编码点云数据通过点云项目数据表示;解码该静态几何编码点云数据中对应该3D场景的部分空间区域的部分项目数据;根据解码后的数据渲染该3D场景的部分空间区域,可以解决相关技术中通常需要遍历完整点云数据之后才能识别出用户所需的部分点云数据,导致解析效率低、耗时长的问题,根据用户需求确定所需的部分项目数据,使得无需遍历完整的点云数据即可获取到所需的部分项目数据,提
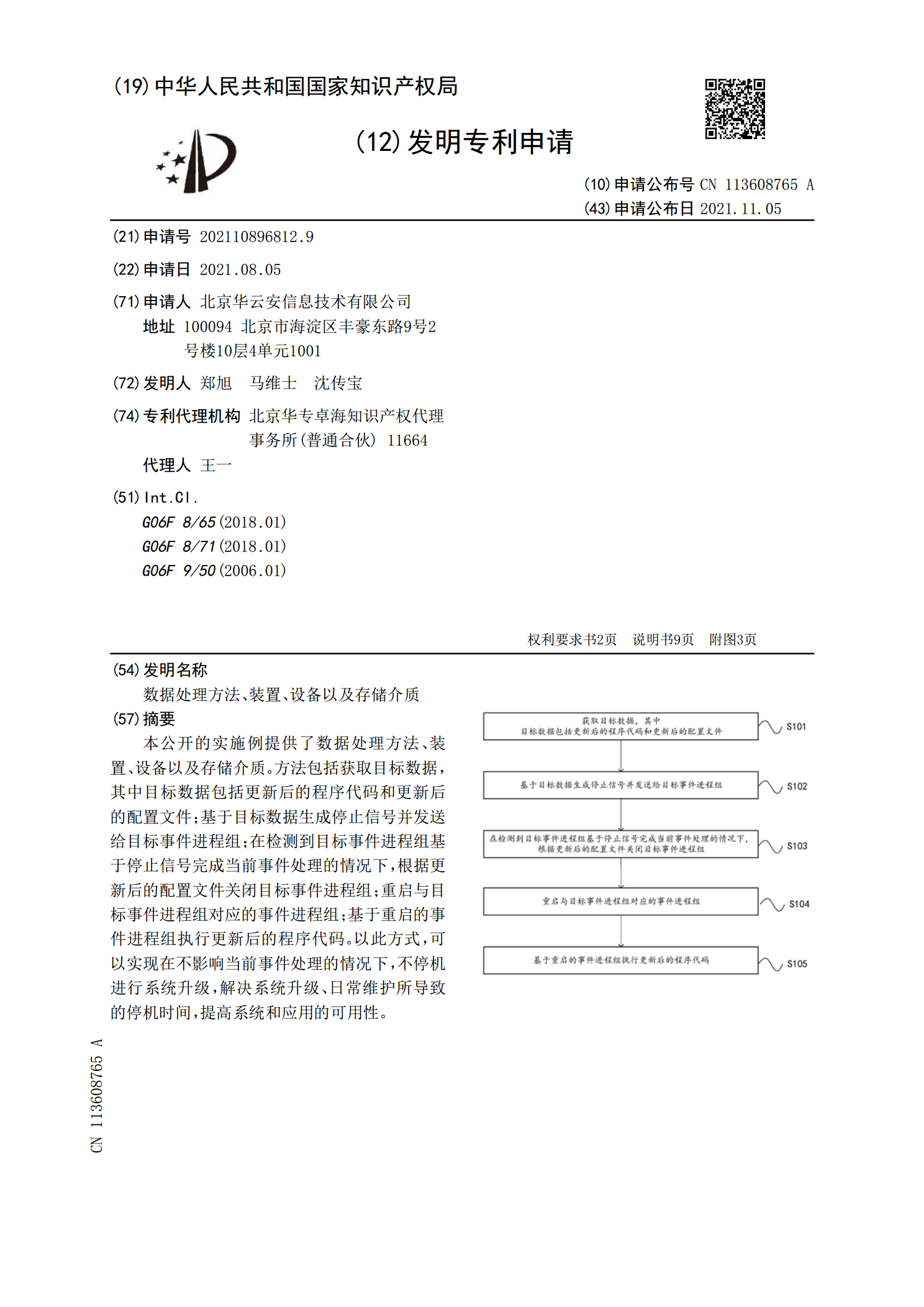
数据处理方法、装置、设备以及存储介质.pdf
本公开的实施例提供了数据处理方法、装置、设备以及存储介质。方法包括获取目标数据,其中目标数据包括更新后的程序代码和更新后的配置文件;基于目标数据生成停止信号并发送给目标事件进程组;在检测到目标事件进程组基于停止信号完成当前事件处理的情况下,根据更新后的配置文件关闭目标事件进程组;重启与目标事件进程组对应的事件进程组;基于重启的事件进程组执行更新后的程序代码。以此方式,可以实现在不影响当前事件处理的情况下,不停机进行系统升级,解决系统升级、日常维护所导致的停机时间,提高系统和应用的可用性。