
车速控制方法及装置,存储介质及车辆.pdf

运升****魔王

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车速控制方法及装置,存储介质及车辆.pdf
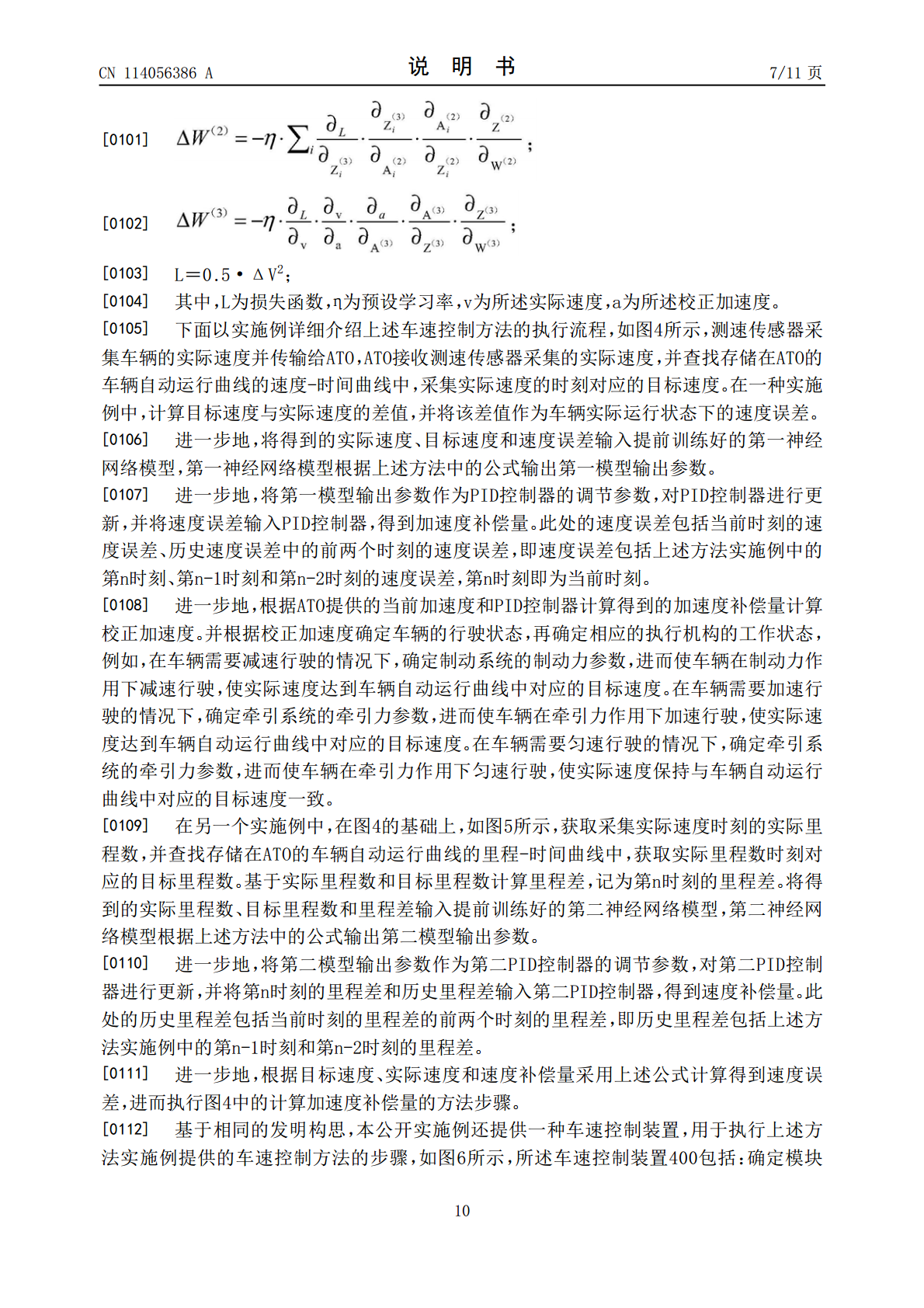
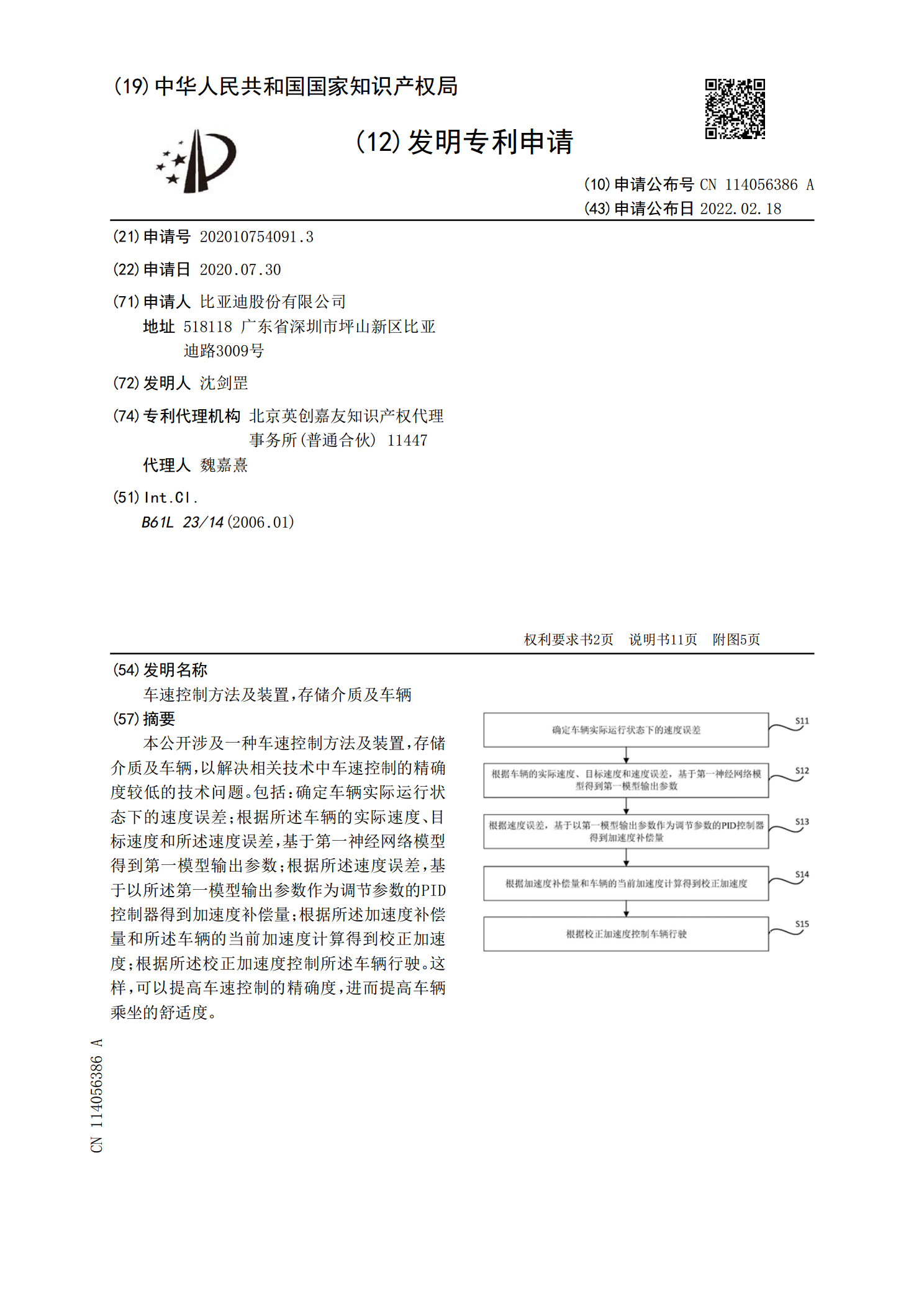
本公开涉及一种车速控制方法及装置,存储介质及车辆,以解决相关技术中车速控制的精确度较低的技术问题。包括:确定车辆实际运行状态下的速度误差;根据所述车辆的实际速度、目标速度和所述速度误差,基于第一神经网络模型得到第一模型输出参数;根据所述速度误差,基于以所述第一模型输出参数作为调节参数的PID控制器得到加速度补偿量;根据所述加速度补偿量和所述车辆的当前加速度计算得到校正加速度;根据所述校正加速度控制所述车辆行驶。这样,可以提高车速控制的精确度,进而提高车辆乘坐的舒适度。

车速规划方法、装置、车辆及存储介质.pdf
本申请实施例提供一种车速规划方法、装置、车辆及存储介质,涉及自动驾驶技术领域。该方法根据自车轨迹和障碍物轨迹,确定表征障碍物的目标矩形框;根据目标矩形框与自车之间的最小横向距离进行查表处理,得到目标限速值;基于目标限速值,对自车的车速进行规划,可以提前进行速度响应,避免与自车距离较近的障碍物发生碰撞,从而可以提高自动驾驶的安全性。
车辆目标车速的控制方法、装置、电子设备及存储介质.pdf
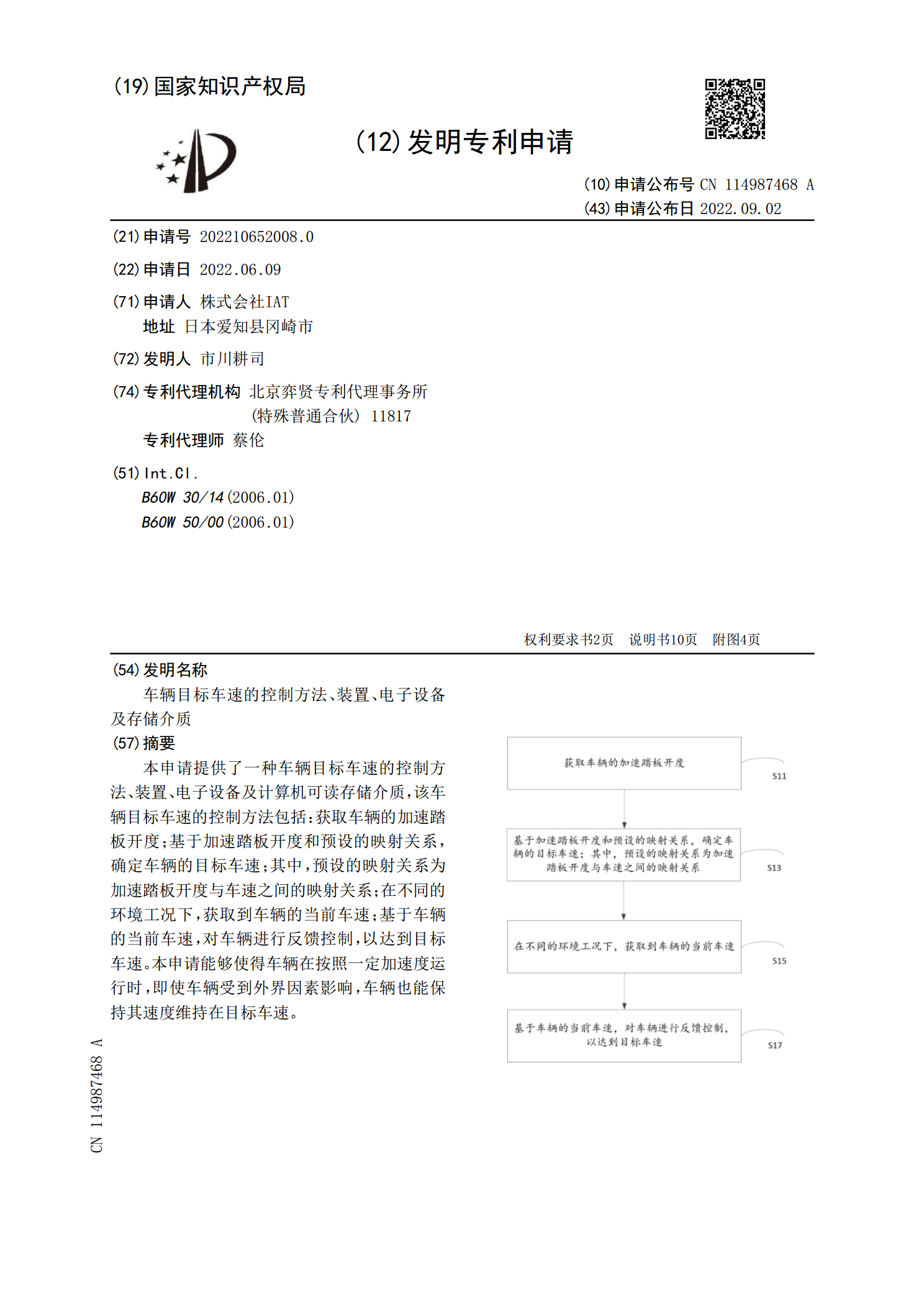
本申请提供了一种车辆目标车速的控制方法、装置、电子设备及计算机可读存储介质,该车辆目标车速的控制方法包括:获取车辆的加速踏板开度;基于加速踏板开度和预设的映射关系,确定车辆的目标车速;其中,预设的映射关系为加速踏板开度与车速之间的映射关系;在不同的环境工况下,获取到车辆的当前车速;基于车辆的当前车速,对车辆进行反馈控制,以达到目标车速。本申请能够使得车辆在按照一定加速度运行时,即使车辆受到外界因素影响,车辆也能保持其速度维持在目标车速。
车辆控制方法、装置、车辆及存储介质.pdf
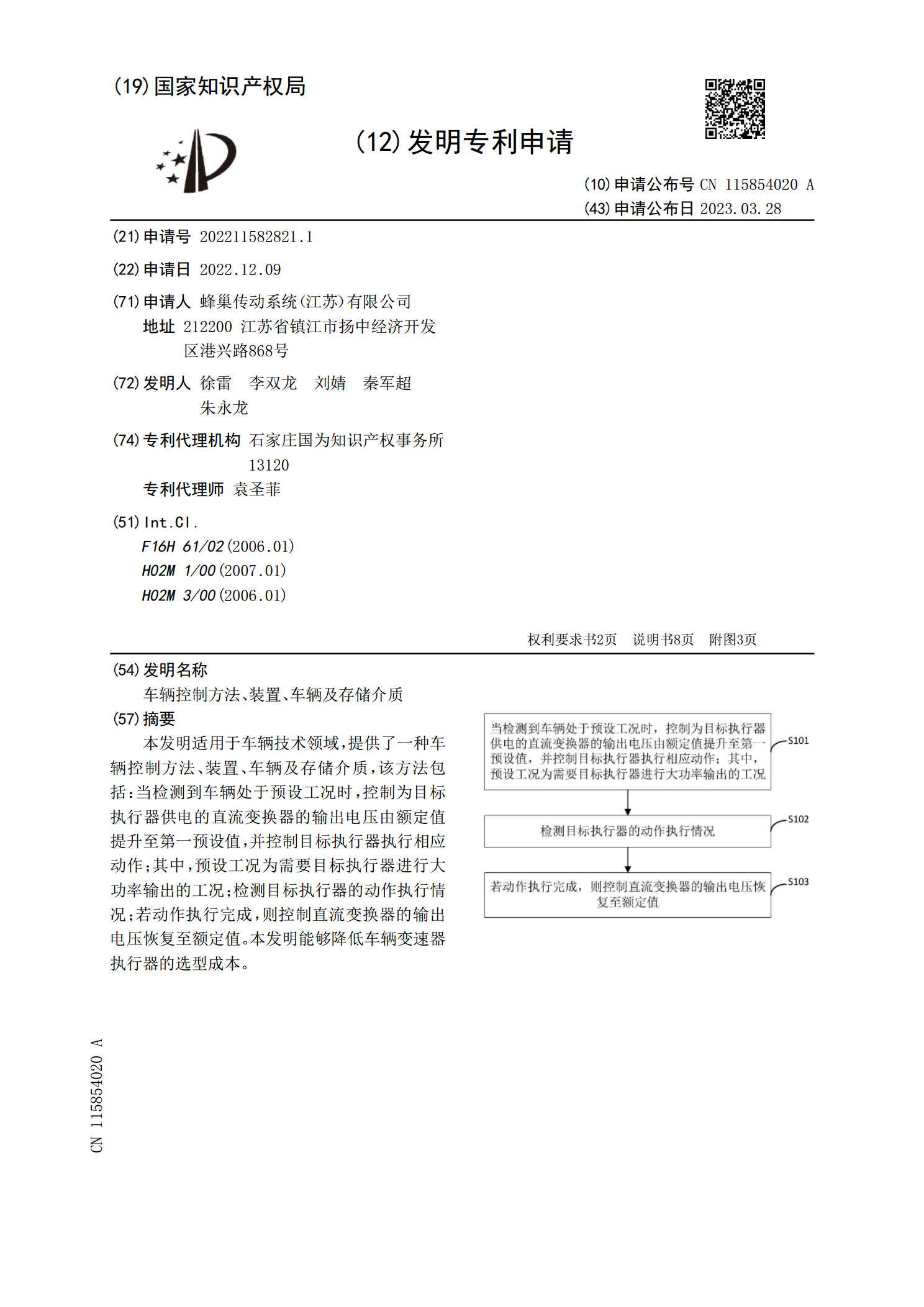
本发明适用于车辆技术领域,提供了一种车辆控制方法、装置、车辆及存储介质,该方法包括:当检测到车辆处于预设工况时,控制为目标执行器供电的直流变换器的输出电压由额定值提升至第一预设值,并控制目标执行器执行相应动作;其中,预设工况为需要目标执行器进行大功率输出的工况;检测目标执行器的动作执行情况;若动作执行完成,则控制直流变换器的输出电压恢复至额定值。本发明能够降低车辆变速器执行器的选型成本。
车辆控制方法、装置、存储介质及车辆.pdf
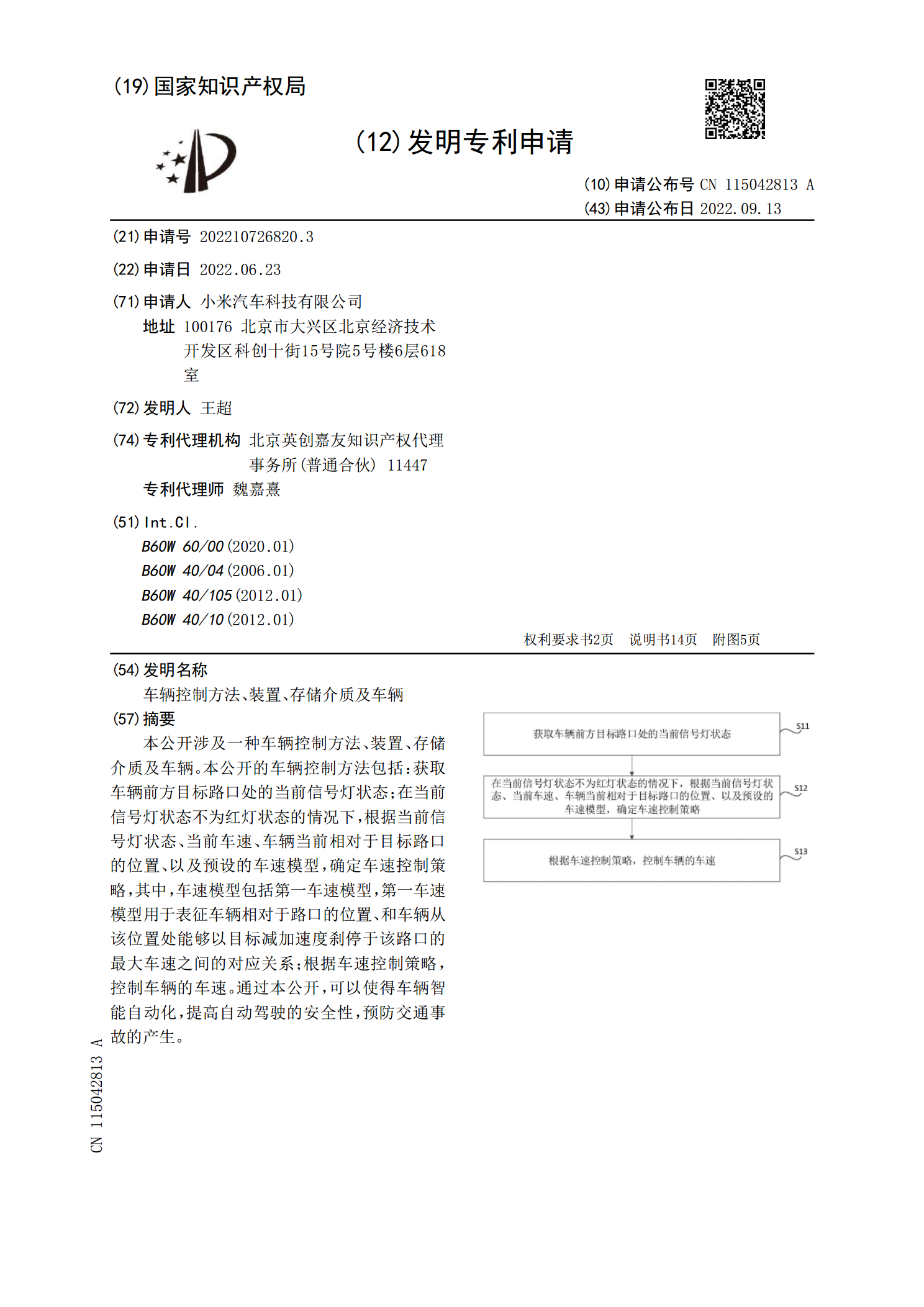
本公开涉及一种车辆控制方法、装置、存储介质及车辆。本公开的车辆控制方法包括:获取车辆前方目标路口处的当前信号灯状态;在当前信号灯状态不为红灯状态的情况下,根据当前信号灯状态、当前车速、车辆当前相对于目标路口的位置、以及预设的车速模型,确定车速控制策略,其中,车速模型包括第一车速模型,第一车速模型用于表征车辆相对于路口的位置、和车辆从该位置处能够以目标减加速度刹停于该路口的最大车速之间的对应关系;根据车速控制策略,控制车辆的车速。通过本公开,可以使得车辆智能自动化,提高自动驾驶的安全性,预防交通事故的产生。