
自动泊车路径规划方法、设备及计算机可读存储介质.pdf

是向****23

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自动泊车路径规划方法、装置、设备及可读存储介质.pdf
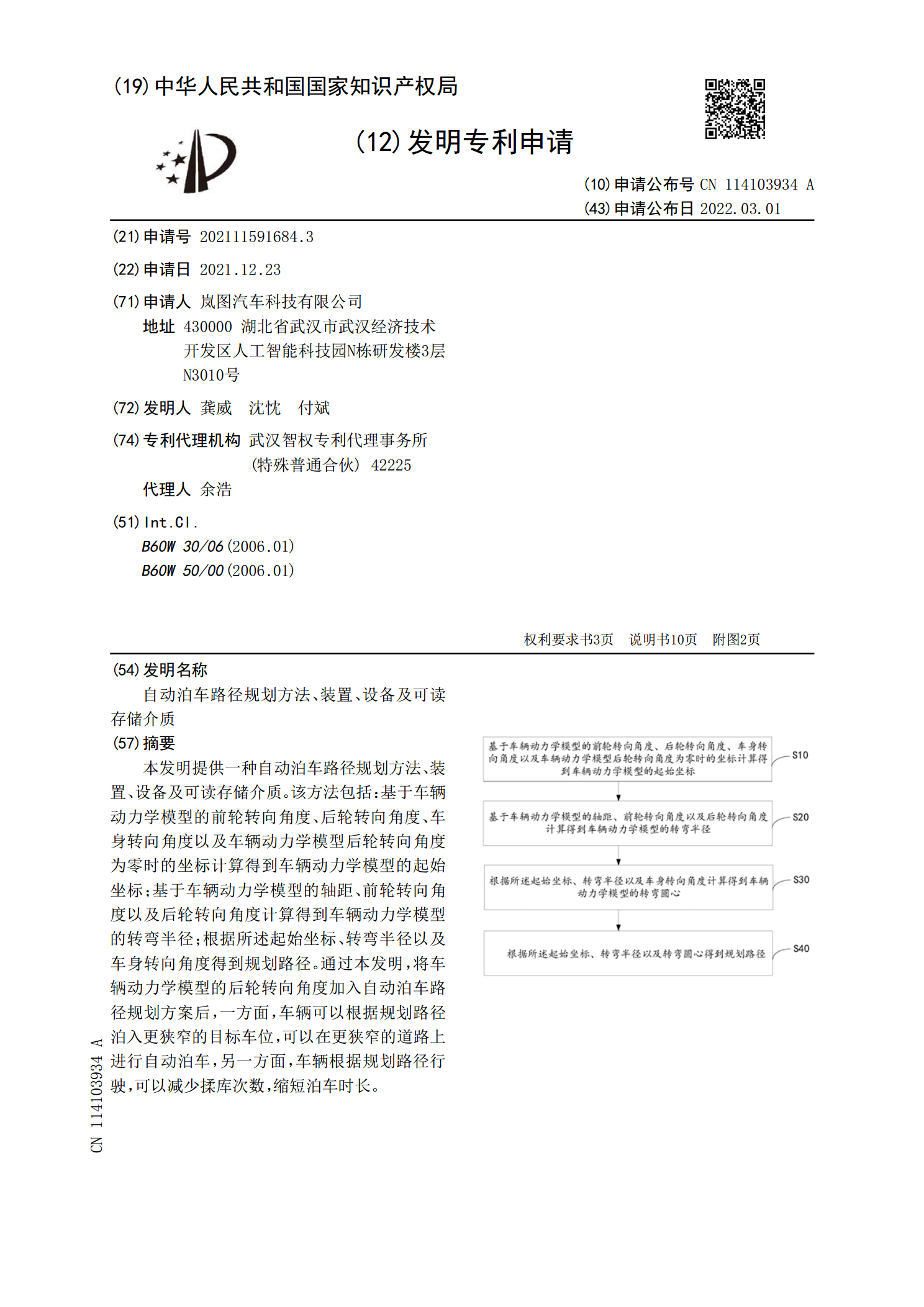
本发明提供一种自动泊车路径规划方法、装置、设备及可读存储介质。该方法包括:基于车辆动力学模型的前轮转向角度、后轮转向角度、车身转向角度以及车辆动力学模型后轮转向角度为零时的坐标计算得到车辆动力学模型的起始坐标;基于车辆动力学模型的轴距、前轮转向角度以及后轮转向角度计算得到车辆动力学模型的转弯半径;根据所述起始坐标、转弯半径以及车身转向角度得到规划路径。通过本发明,将车辆动力学模型的后轮转向角度加入自动泊车路径规划方案后,一方面,车辆可以根据规划路径泊入更狭窄的目标车位,可以在更狭窄的道路上进行自动泊车,另

自动泊车路径规划方法、设备及计算机可读存储介质.pdf
本发明公开了一种自动泊车路径规划方法、设备及计算机存储介质,该方法包括:获得待规划路径所在场所的平面环境信息,并基于所述平面环境信息确定第一规划路线;其中,所述平面环境信息包括车辆的当前位置和目标车位;对第一规划路线中的转弯路段依所述车辆的转向能力进行优化,使得优化后的转弯路段满足曲率连续;将所述优化后的第一规划路线中的各路线元素的存储顺序依车辆行进方向进行调整,得到用于所述车辆自动泊车的第二规划路线;本发明实施例的路径规划过程中约束简单,能有效提高路径规划速度、降低路径规划难度。
自动泊车方法、系统、设备及计算机可读存储介质.pdf
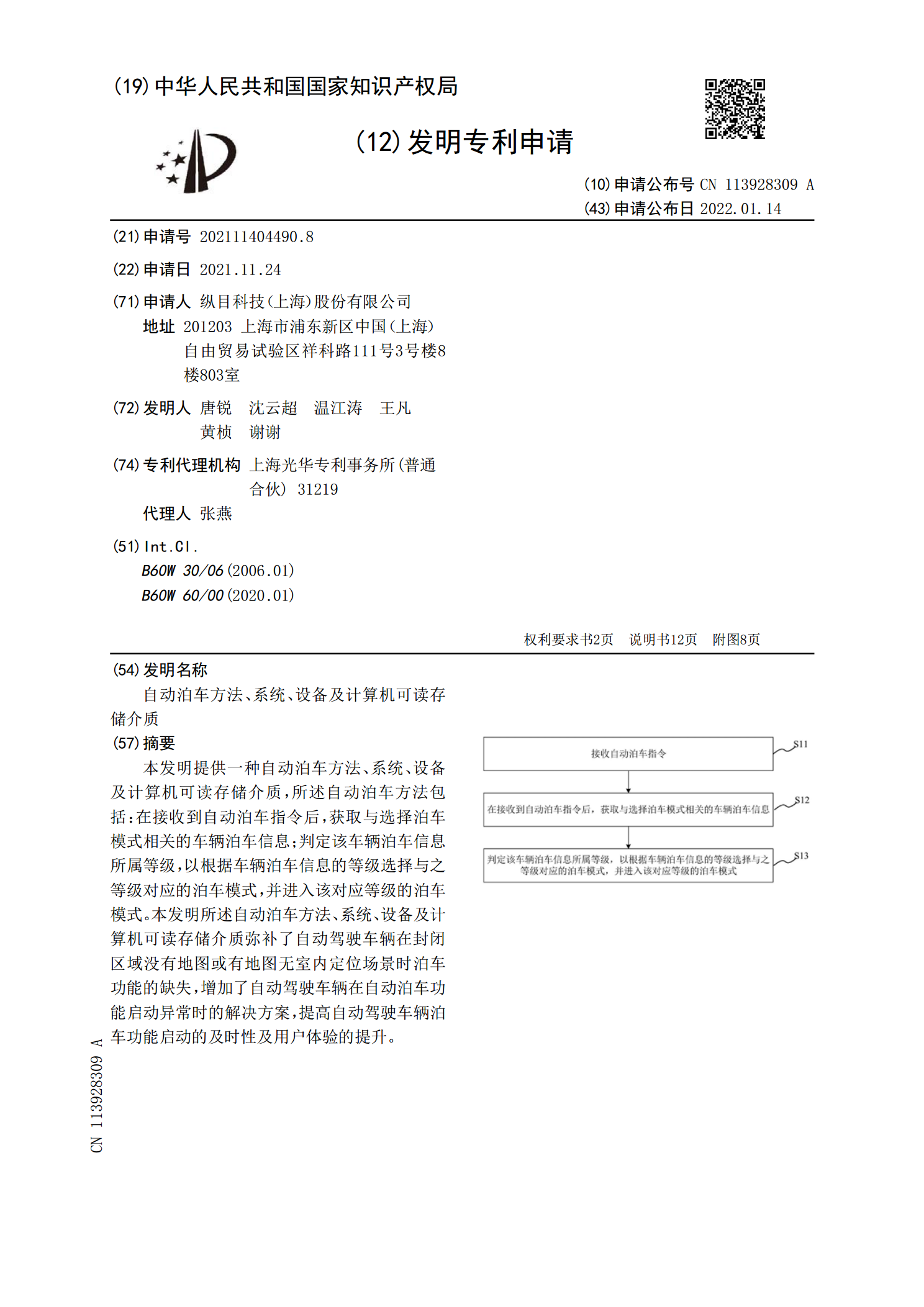
本发明提供一种自动泊车方法、系统、设备及计算机可读存储介质,所述自动泊车方法包括:在接收到自动泊车指令后,获取与选择泊车模式相关的车辆泊车信息;判定该车辆泊车信息所属等级,以根据车辆泊车信息的等级选择与之等级对应的泊车模式,并进入该对应等级的泊车模式。本发明所述自动泊车方法、系统、设备及计算机可读存储介质弥补了自动驾驶车辆在封闭区域没有地图或有地图无室内定位场景时泊车功能的缺失,增加了自动驾驶车辆在自动泊车功能启动异常时的解决方案,提高自动驾驶车辆泊车功能启动的及时性及用户体验的提升。
激活自动泊车的系统、方法及计算机可读存储介质.pdf
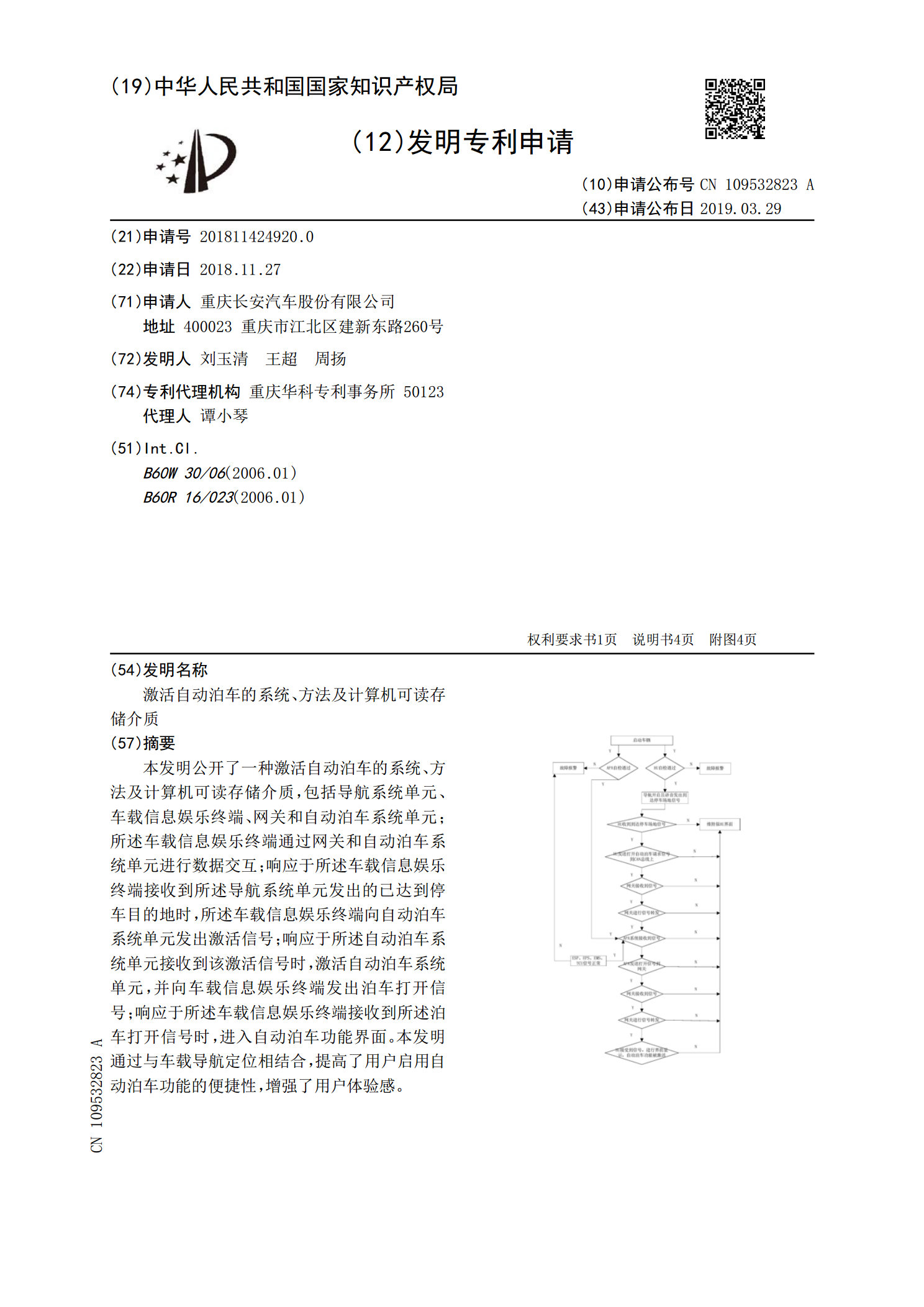
本发明公开了一种激活自动泊车的系统、方法及计算机可读存储介质,包括导航系统单元、车载信息娱乐终端、网关和自动泊车系统单元;所述车载信息娱乐终端通过网关和自动泊车系统单元进行数据交互;响应于所述车载信息娱乐终端接收到所述导航系统单元发出的已达到停车目的地时,所述车载信息娱乐终端向自动泊车系统单元发出激活信号;响应于所述自动泊车系统单元接收到该激活信号时,激活自动泊车系统单元,并向车载信息娱乐终端发出泊车打开信号;响应于所述车载信息娱乐终端接收到所述泊车打开信号时,进入自动泊车功能界面。本发明通过与车载导航定
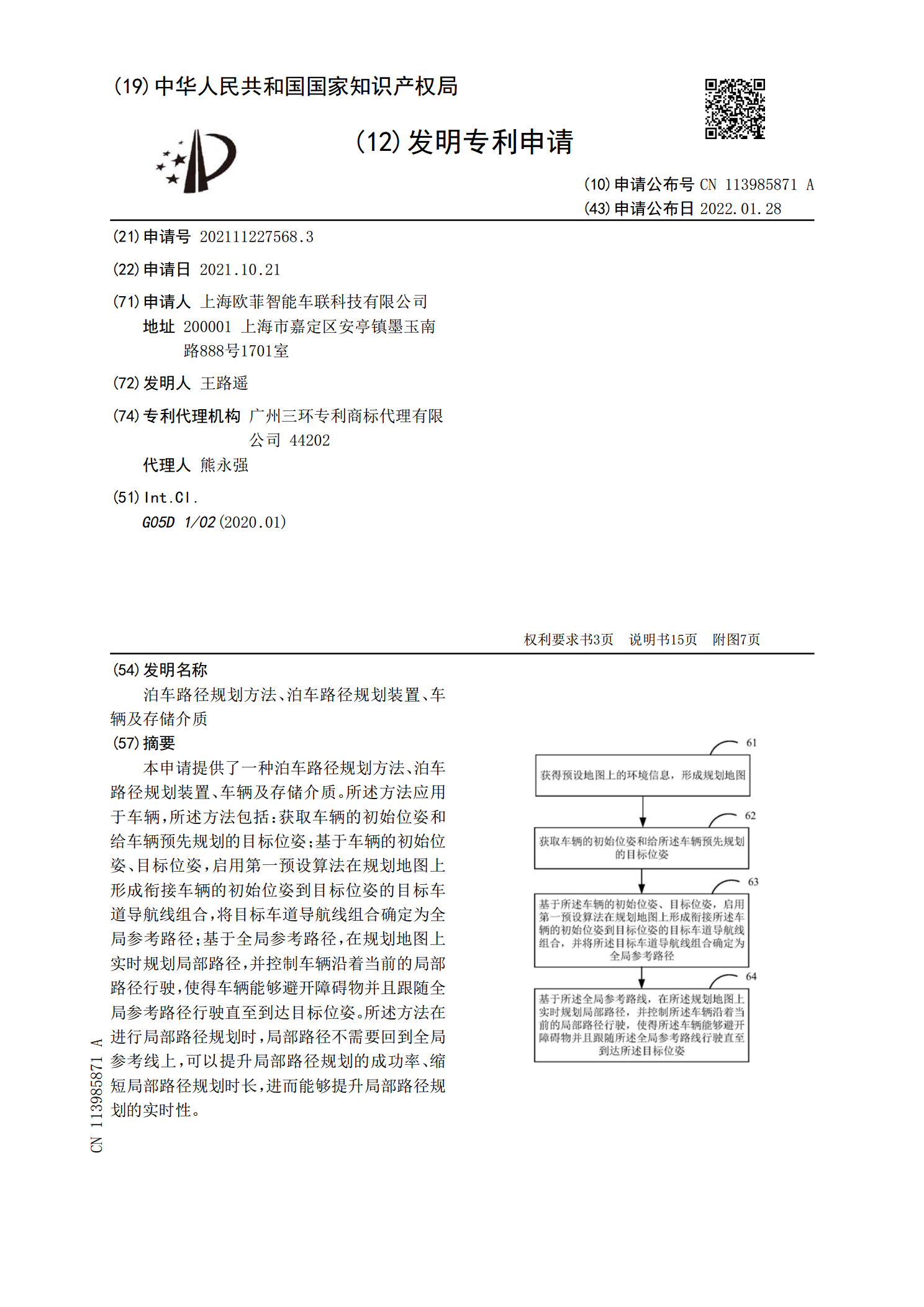
泊车路径规划方法、泊车路径规划装置、车辆及存储介质.pdf
本申请提供了一种泊车路径规划方法、泊车路径规划装置、车辆及存储介质。所述方法应用于车辆,所述方法包括:获取车辆的初始位姿和给车辆预先规划的目标位姿;基于车辆的初始位姿、目标位姿,启用第一预设算法在规划地图上形成衔接车辆的初始位姿到目标位姿的目标车道导航线组合,将目标车道导航线组合确定为全局参考路径;基于全局参考路径,在规划地图上实时规划局部路径,并控制车辆沿着当前的局部路径行驶,使得车辆能够避开障碍物并且跟随全局参考路径行驶直至到达目标位姿。所述方法在进行局部路径规划时,局部路径不需要回到全局参考线上,可