
车辆编队控制方法、装置、设备及存储介质.pdf

悠柔****找我

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆编队控制方法、装置、设备及存储介质.pdf
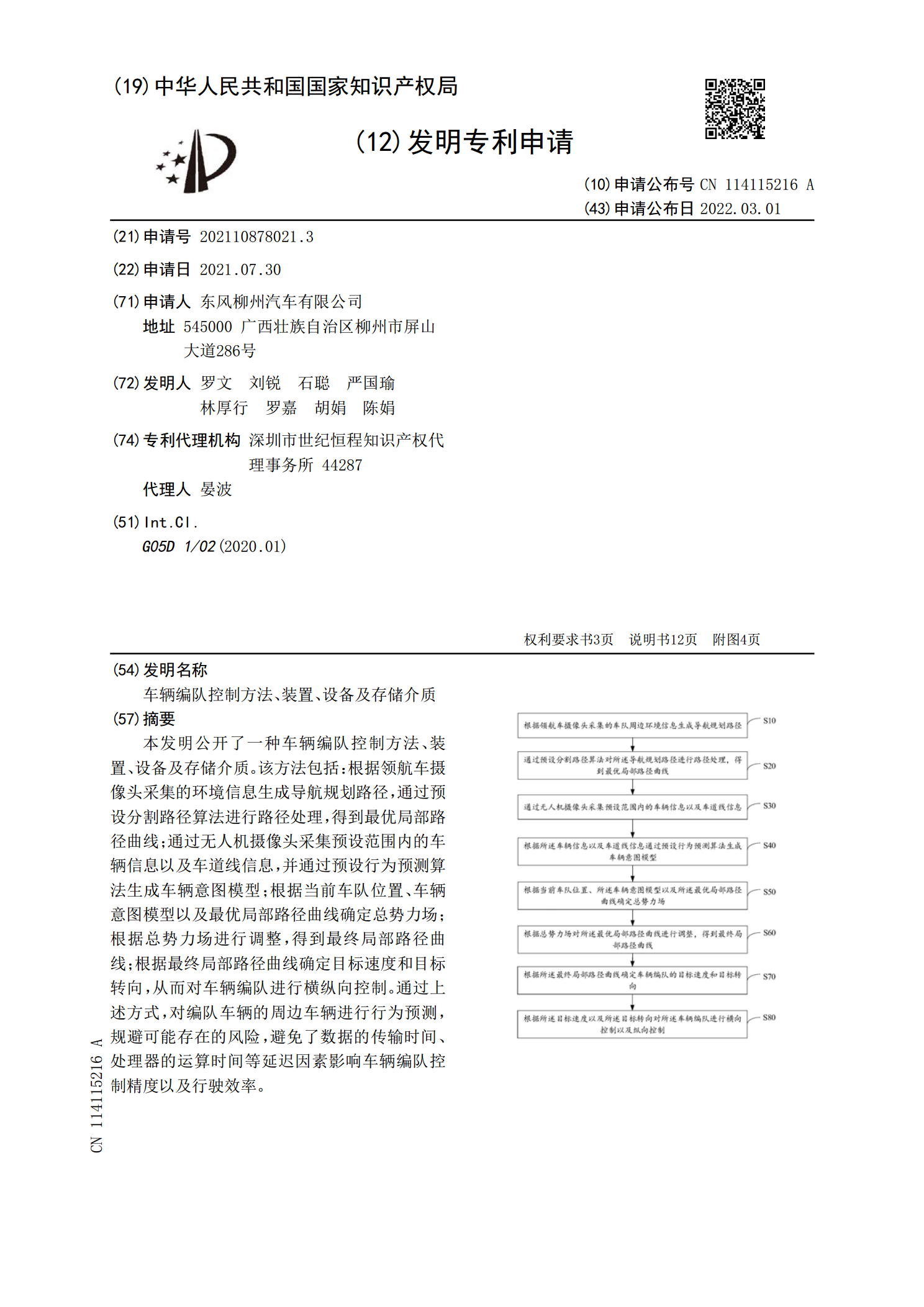
本发明公开了一种车辆编队控制方法、装置、设备及存储介质。该方法包括:根据领航车摄像头采集的环境信息生成导航规划路径,通过预设分割路径算法进行路径处理,得到最优局部路径曲线;通过无人机摄像头采集预设范围内的车辆信息以及车道线信息,并通过预设行为预测算法生成车辆意图模型;根据当前车队位置、车辆意图模型以及最优局部路径曲线确定总势力场;根据总势力场进行调整,得到最终局部路径曲线;根据最终局部路径曲线确定目标速度和目标转向,从而对车辆编队进行横纵向控制。通过上述方式,对编队车辆的周边车辆进行行为预测,规避可能存在

车辆编队方法、装置、设备及存储介质.pdf
本申请实施例提供一种车辆编队方法、装置、设备及存储介质,该方法可应用于港口、矿山、机场、口岸、公路货运、城市配送等业务场景。该方法包括:确定待加入车队的目标车辆;获取车队的第一密钥和目标车辆的第二密钥,第一密钥基于车队的路径规划信息生成的,第二密钥基于目标车辆的路径规划信息生成的;在第一密钥与第二密钥满足设定的匹配要求的情况下,则目标车辆加入车队。本申请实施例实现了准确识别目标车辆能否加入车队,从而提高车辆编队的安全性和可靠性。
用于列车的编队运行控制方法、装置及存储介质.pdf
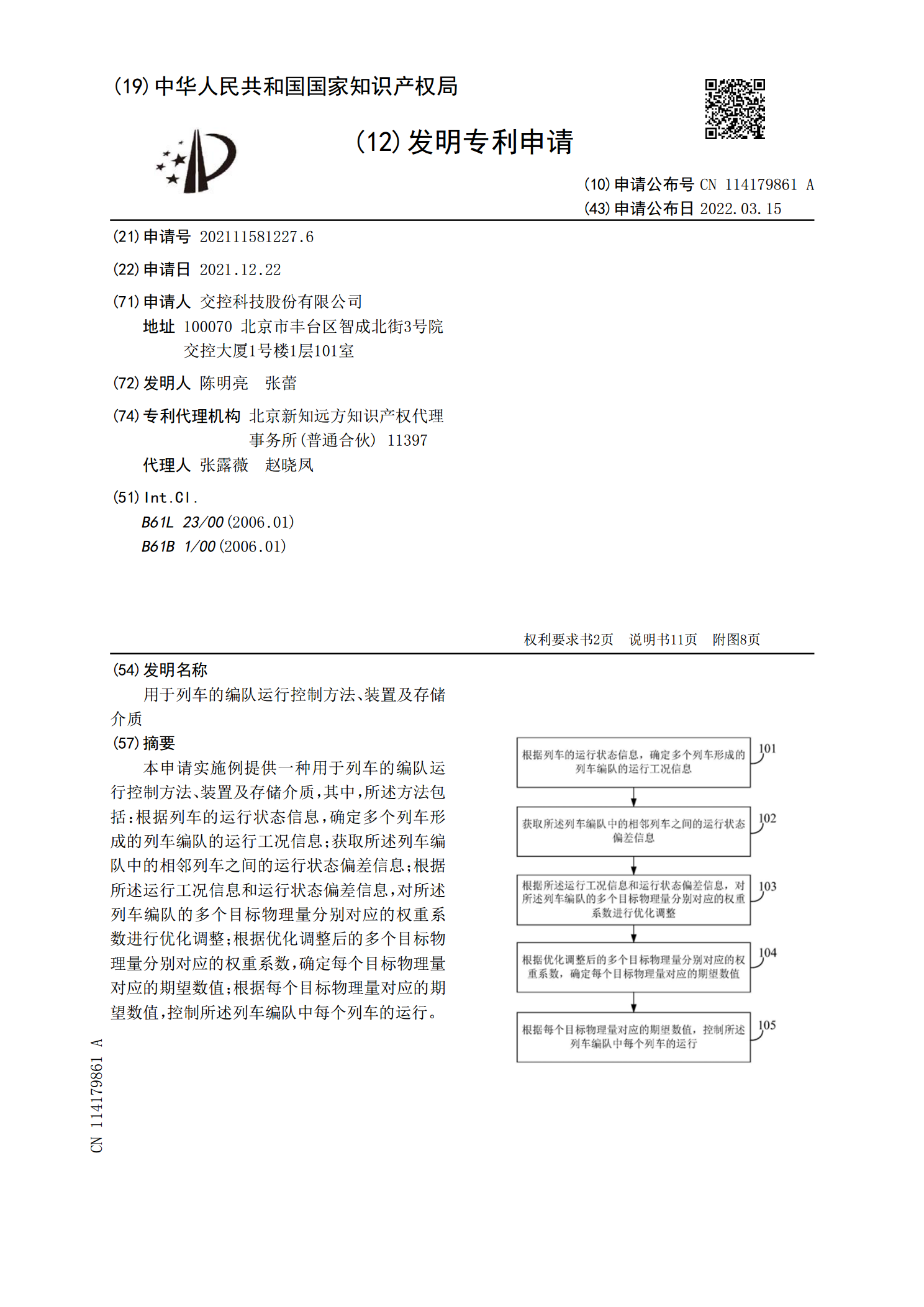
本申请实施例提供一种用于列车的编队运行控制方法、装置及存储介质,其中,所述方法包括:根据列车的运行状态信息,确定多个列车形成的列车编队的运行工况信息;获取所述列车编队中的相邻列车之间的运行状态偏差信息;根据所述运行工况信息和运行状态偏差信息,对所述列车编队的多个目标物理量分别对应的权重系数进行优化调整;根据优化调整后的多个目标物理量分别对应的权重系数,确定每个目标物理量对应的期望数值;根据每个目标物理量对应的期望数值,控制所述列车编队中每个列车的运行。
车辆座椅控制方法、装置、设备、及存储介质.pdf
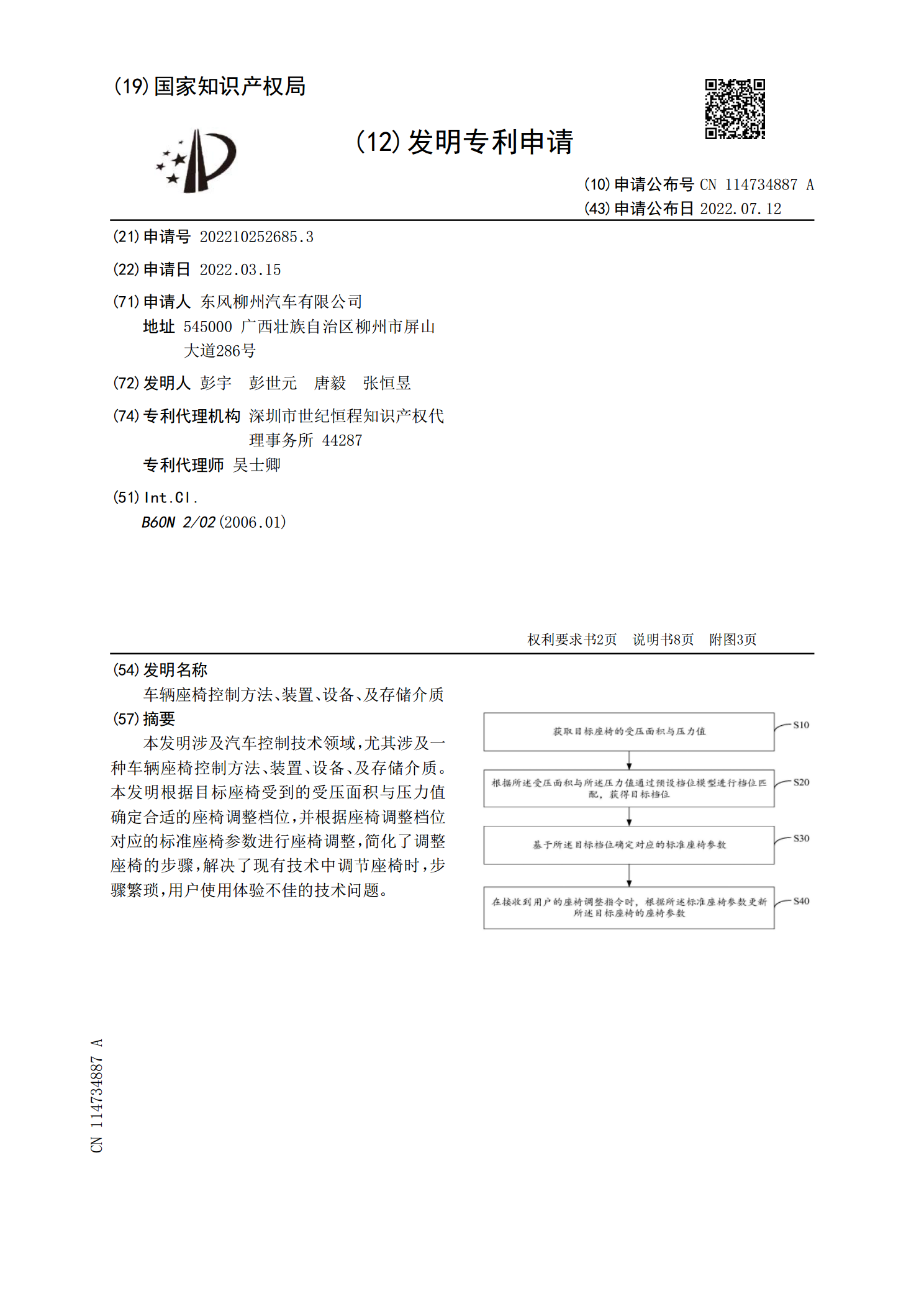
本发明涉及汽车控制技术领域,尤其涉及一种车辆座椅控制方法、装置、设备、及存储介质。本发明根据目标座椅受到的受压面积与压力值确定合适的座椅调整档位,并根据座椅调整档位对应的标准座椅参数进行座椅调整,简化了调整座椅的步骤,解决了现有技术中调节座椅时,步骤繁琐,用户使用体验不佳的技术问题。
车辆横向控制方法、装置、设备及存储介质.pdf
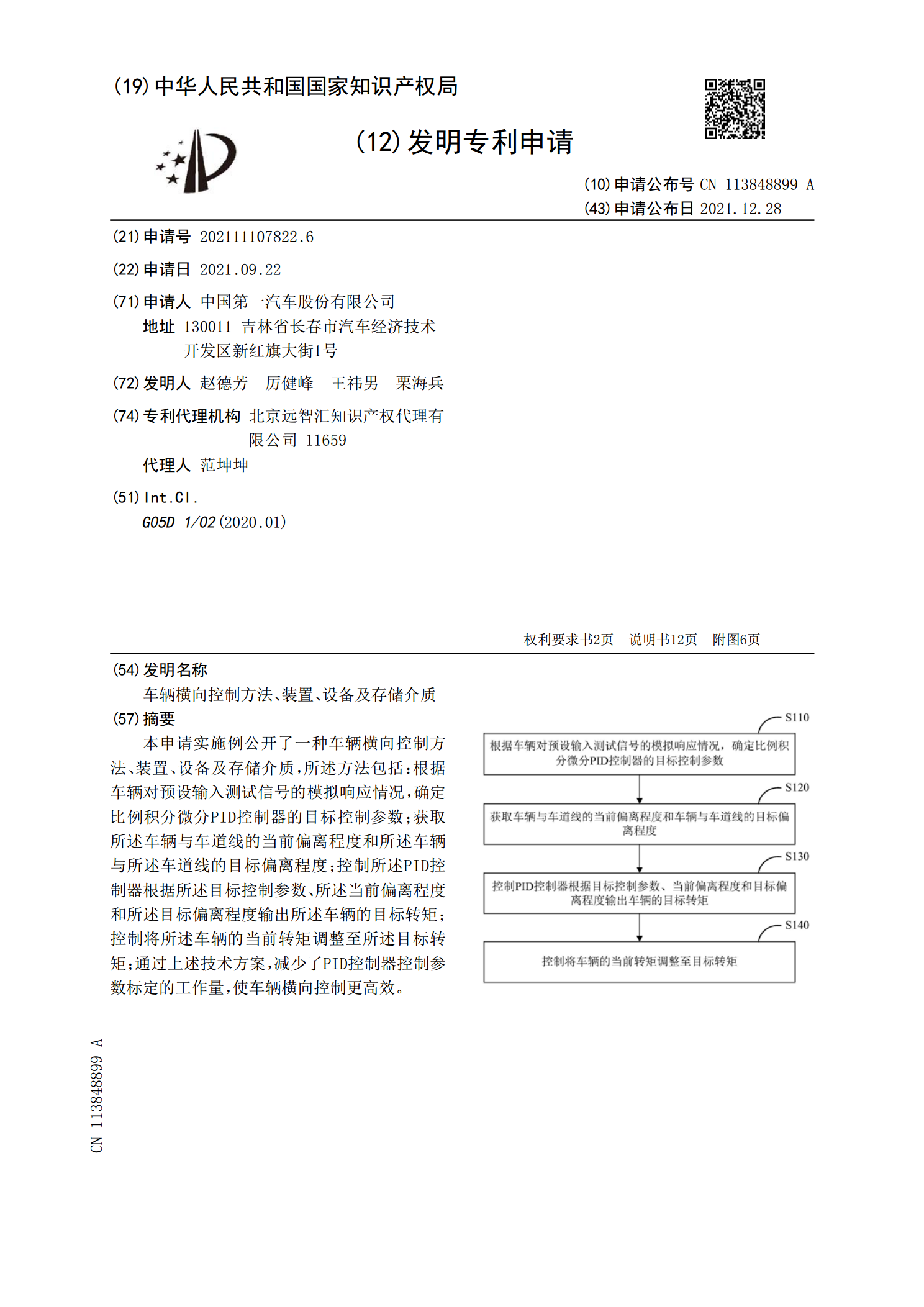
本申请实施例公开了一种车辆横向控制方法、装置、设备及存储介质,所述方法包括:根据车辆对预设输入测试信号的模拟响应情况,确定比例积分微分PID控制器的目标控制参数;获取所述车辆与车道线的当前偏离程度和所述车辆与所述车道线的目标偏离程度;控制所述PID控制器根据所述目标控制参数、所述当前偏离程度和所述目标偏离程度输出所述车辆的目标转矩;控制将所述车辆的当前转矩调整至所述目标转矩;通过上述技术方案,减少了PID控制器控制参数标定的工作量,使车辆横向控制更高效。