
电动车辆控制方法及电动车辆控制装置.pdf

森林****io

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

电动车辆控制方法及电动车辆控制装置.pdf
电动车辆控制方法包含:计算包含路面坡度的影响的干扰扭矩的推定值的干扰扭矩推定处理、获取与车速相关的速度参数的速度参数获取处理、以根据速度参数的降低使扭矩指令值收敛为干扰扭矩的推定值的方式计算停车时基本扭矩目标值的停车处理、对停车时基本扭矩目标值进行滤波处理来计算停车时修正扭矩目标值的减振处理,在减振处理中,在设定为相对高的车速域的第一要停车时,基于停车时基本扭矩目标值设定扭矩指令值,在设定为相对低的车速域的第二要停车时,基于停车时修正扭矩目标值设定扭矩指令值。
电动车辆的控制装置以及电动车辆的控制方法.pdf
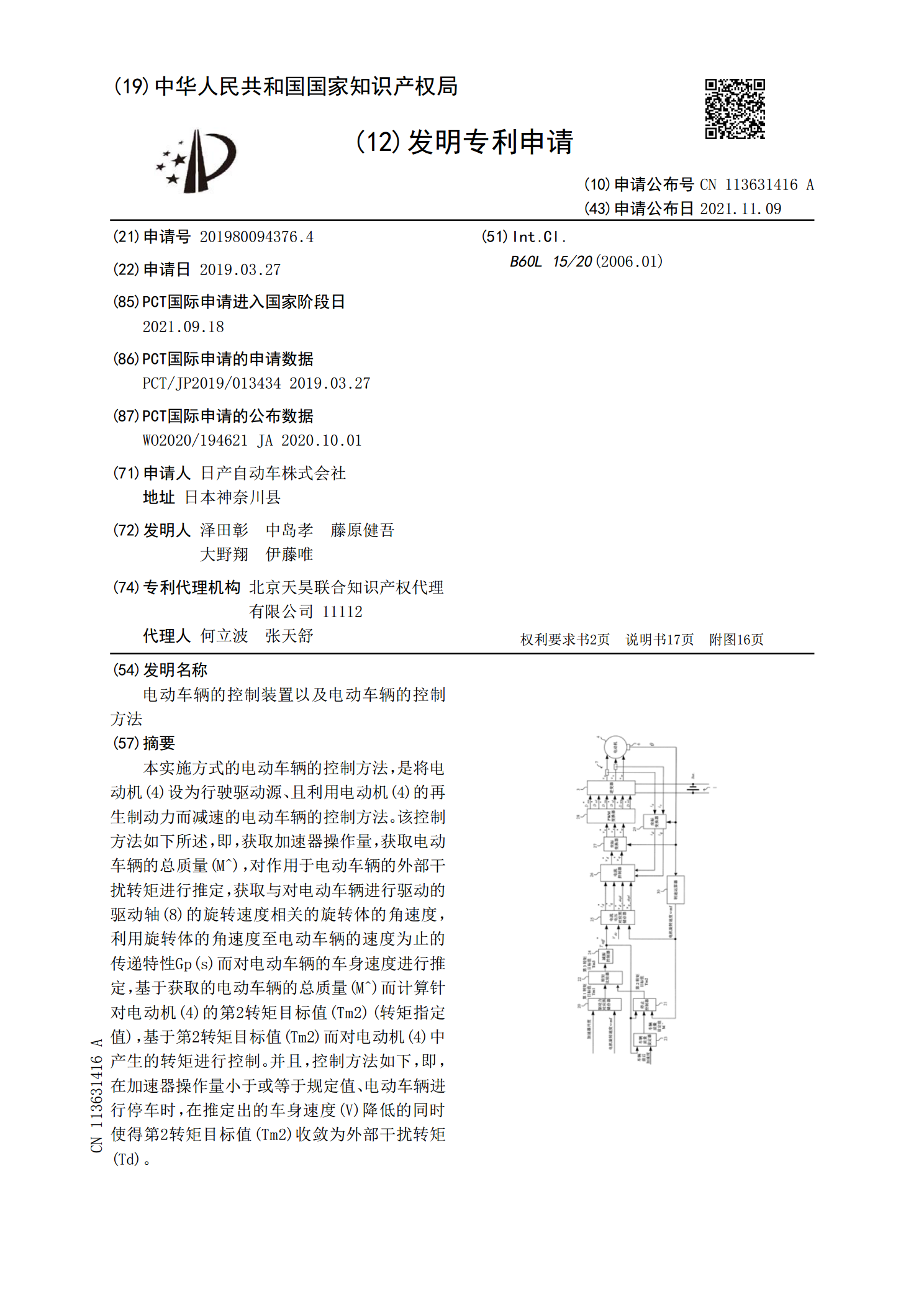
本实施方式的电动车辆的控制方法,是将电动机(4)设为行驶驱动源、且利用电动机(4)的再生制动力而减速的电动车辆的控制方法。该控制方法如下所述,即,获取加速器操作量,获取电动车辆的总质量(M^),对作用于电动车辆的外部干扰转矩进行推定,获取与对电动车辆进行驱动的驱动轴(8)的旋转速度相关的旋转体的角速度,利用旋转体的角速度至电动车辆的速度为止的传递特性Gp(s)而对电动车辆的车身速度进行推定,基于获取的电动车辆的总质量(M^)而计算针对电动机(4)的第2转矩目标值(Tm2)(转矩指定值),基于第2转矩目标值
用于电动车辆的电池控制装置、方法、电动车辆.pdf
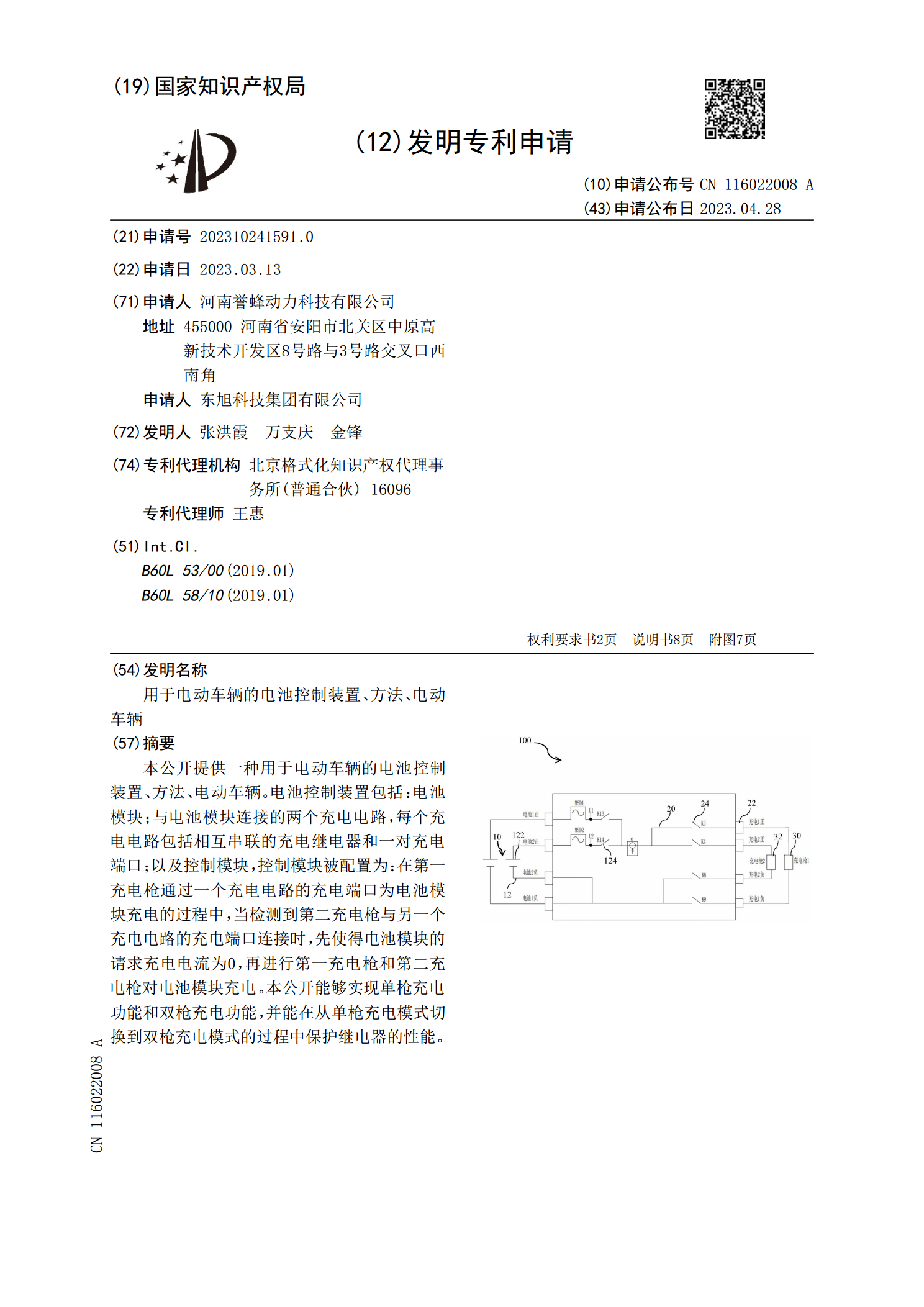
本公开提供一种用于电动车辆的电池控制装置、方法、电动车辆。电池控制装置包括:电池模块;与电池模块连接的两个充电电路,每个充电电路包括相互串联的充电继电器和一对充电端口;以及控制模块,控制模块被配置为:在第一充电枪通过一个充电电路的充电端口为电池模块充电的过程中,当检测到第二充电枪与另一个充电电路的充电端口连接时,先使得电池模块的请求充电电流为0,再进行第一充电枪和第二充电枪对电池模块充电。本公开能够实现单枪充电功能和双枪充电功能,并能在从单枪充电模式切换到双枪充电模式的过程中保护继电器的性能。
电动车辆的控制装置、电动车辆的控制系统及电动车辆的控制方法.pdf
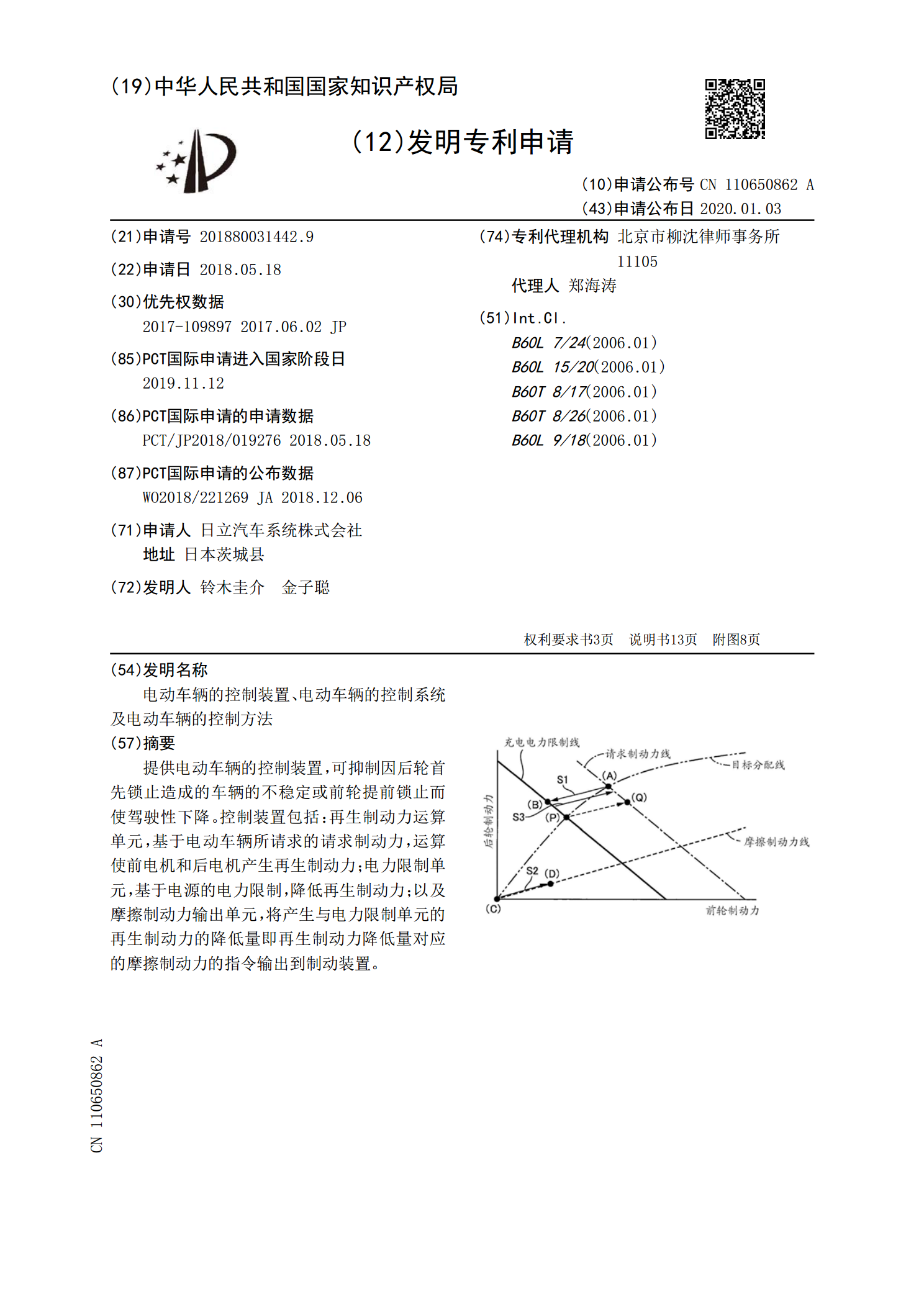
提供电动车辆的控制装置,可抑制因后轮首先锁止造成的车辆的不稳定或前轮提前锁止而使驾驶性下降。控制装置包括:再生制动力运算单元,基于电动车辆所请求的请求制动力,运算使前电机和后电机产生再生制动力;电力限制单元,基于电源的电力限制,降低再生制动力;以及摩擦制动力输出单元,将产生与电力限制单元的再生制动力的降低量即再生制动力降低量对应的摩擦制动力的指令输出到制动装置。
电动车辆的控制装置、电动车辆的控制系统以及电动车辆的控制方法.pdf
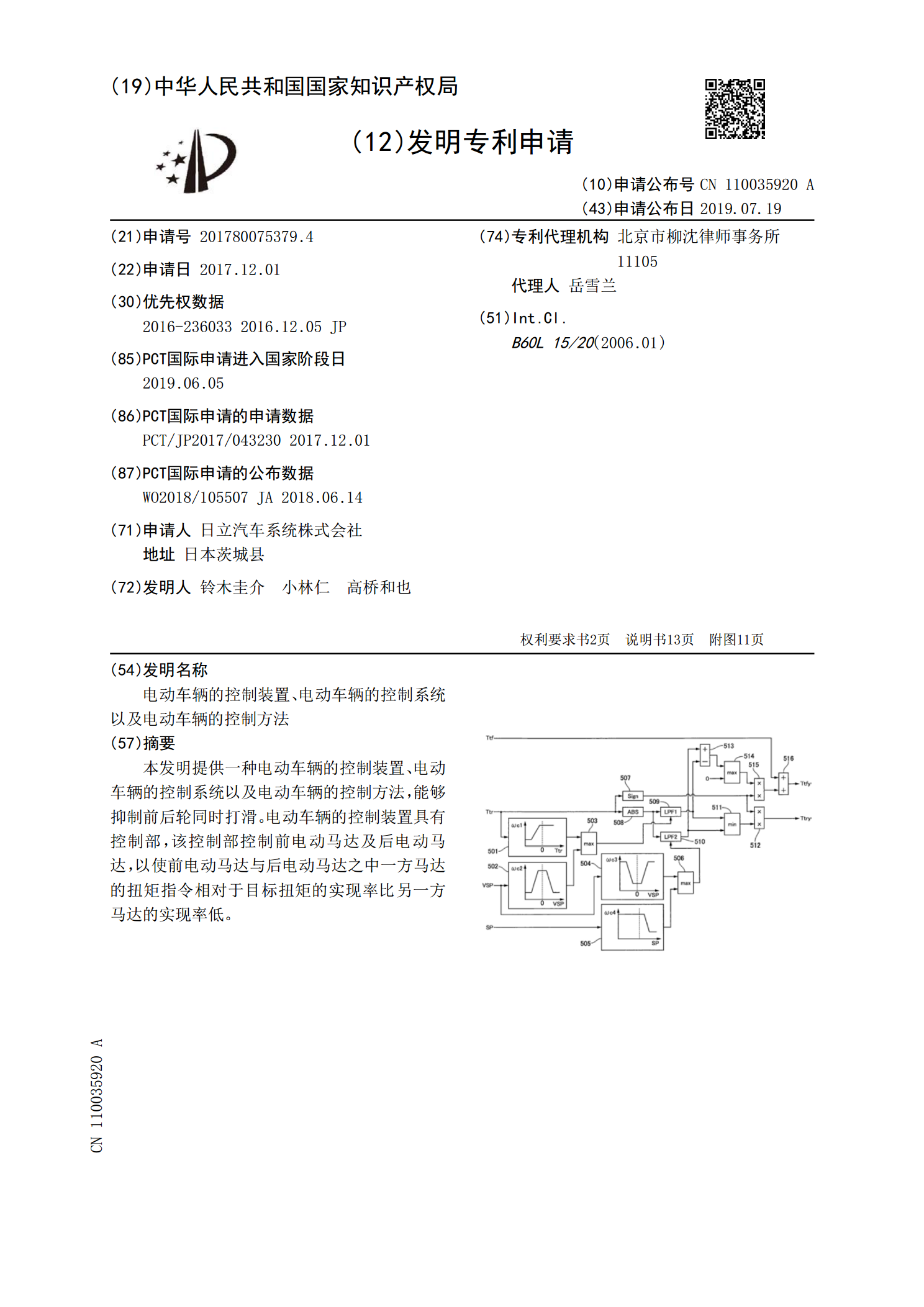
本发明提供一种电动车辆的控制装置、电动车辆的控制系统以及电动车辆的控制方法,能够抑制前后轮同时打滑。电动车辆的控制装置具有控制部,该控制部控制前电动马达及后电动马达,以使前电动马达与后电动马达之中一方马达的扭矩指令相对于目标扭矩的实现率比另一方马达的实现率低。