
一种无人机巡检控制方法.pdf

英瑞****写意


1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人机巡检控制方法.pdf
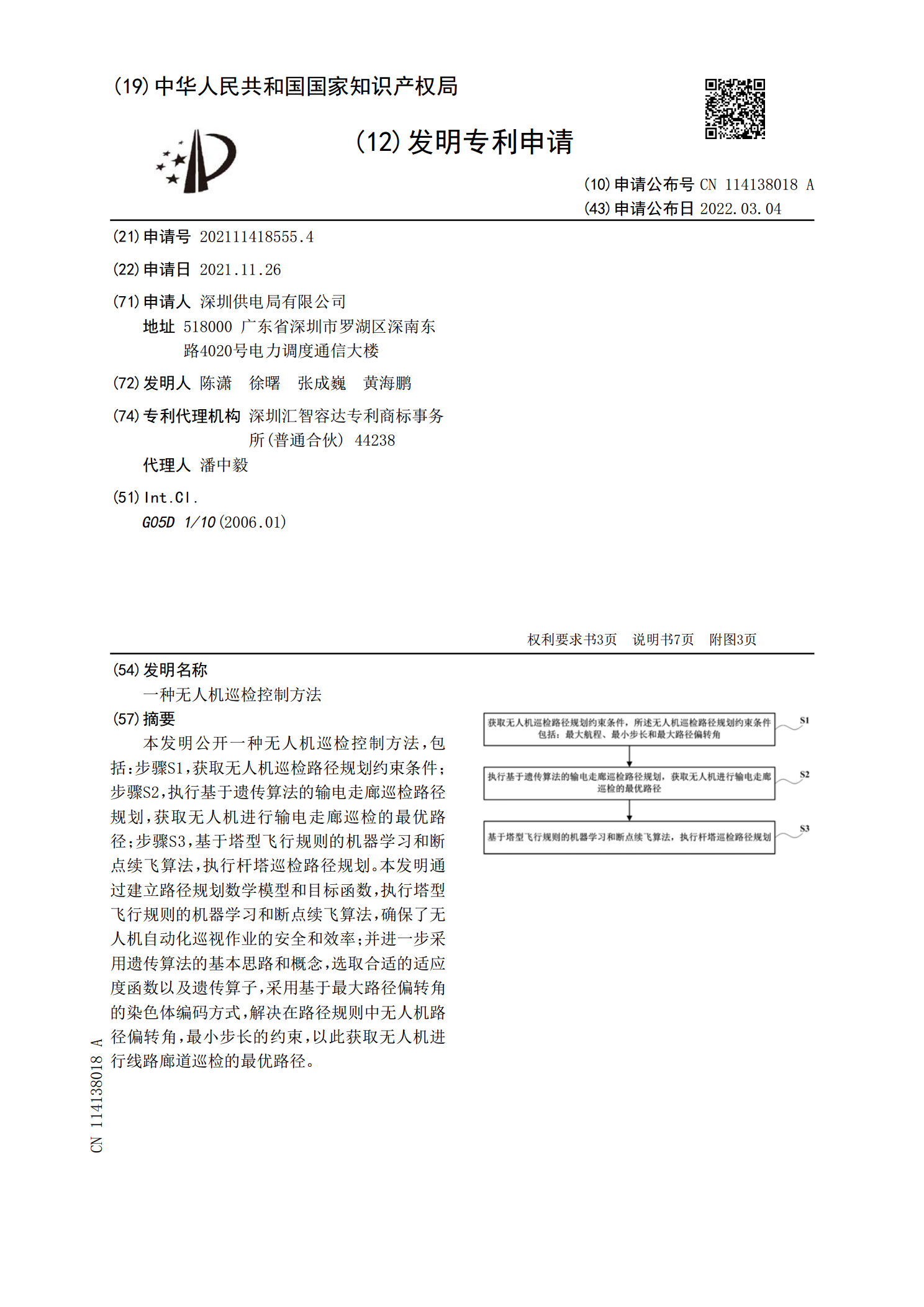
本发明公开一种无人机巡检控制方法,包括:步骤S1,获取无人机巡检路径规划约束条件;步骤S2,执行基于遗传算法的输电走廊巡检路径规划,获取无人机进行输电走廊巡检的最优路径;步骤S3,基于塔型飞行规则的机器学习和断点续飞算法,执行杆塔巡检路径规划。本发明通过建立路径规划数学模型和目标函数,执行塔型飞行规则的机器学习和断点续飞算法,确保了无人机自动化巡视作业的安全和效率;并进一步采用遗传算法的基本思路和概念,选取合适的适应度函数以及遗传算子,采用基于最大路径偏转角的染色体编码方式,解决在路径规则中无人机路径偏转
无人机巡检的控制方法、控制装置以及巡检系统.pdf
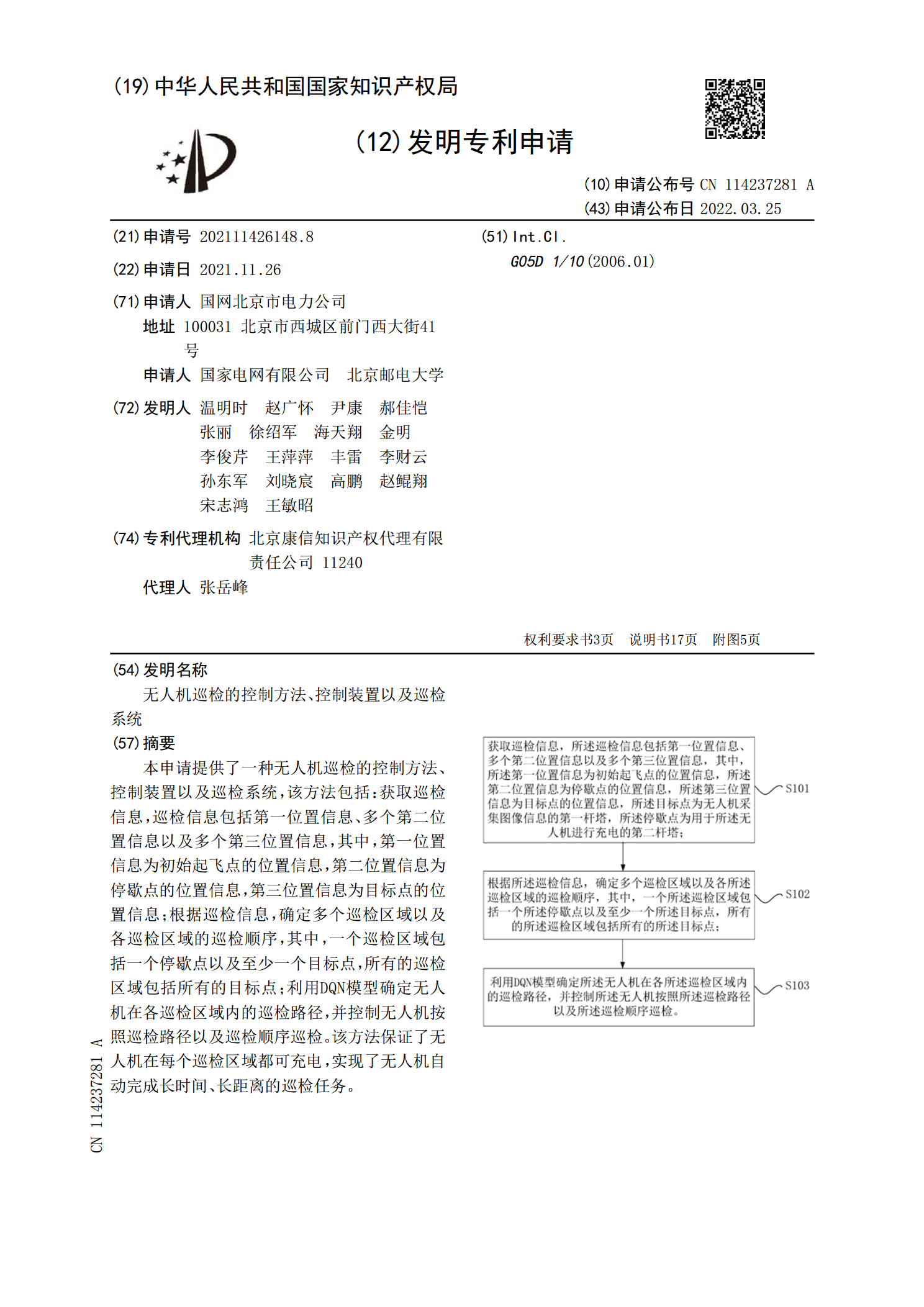
本申请提供了一种无人机巡检的控制方法、控制装置以及巡检系统,该方法包括:获取巡检信息,巡检信息包括第一位置信息、多个第二位置信息以及多个第三位置信息,其中,第一位置信息为初始起飞点的位置信息,第二位置信息为停歇点的位置信息,第三位置信息为目标点的位置信息;根据巡检信息,确定多个巡检区域以及各巡检区域的巡检顺序,其中,一个巡检区域包括一个停歇点以及至少一个目标点,所有的巡检区域包括所有的目标点;利用DQN模型确定无人机在各巡检区域内的巡检路径,并控制无人机按照巡检路径以及巡检顺序巡检。该方法保证了无人机在每

一种巡检用无人机、控制器及控制方法.pdf
本发明实施例提供了一种巡检用无人机、控制器及控制方法,所述巡检用无人机包括:第一处理器、摄像头、照明装置和第一无线通信模块,第一处理器分别与摄像头、照明装置和第一无线通信模块电连接;摄像头对被检设备进行拍摄并将拍摄获得的影像并发送给第一处理器;第一处理器控制照明装置的工作状态以对摄像头所拍摄的被检设备进行照明;第一处理器将拍摄获得的影像通过第一无线通信模块输出至其他设备。本发明实施例通过设置照明装置,并通过第一处理器控制照明装置的工作状态,可以在光线不足的工作环境下对被检设备进行巡检,不需要工作人员使用手

一种架空高压线巡检无人机、无人机巡检方法.pdf
本发明公开了一种架空高压线巡检无人机、无人机巡检方法,包括机体,所述机体的四周对称设置有四组飞行组件,每组所述飞行组件包括支架、飞行电机和桨叶,所述支架的一端与所述机体的外表面中间位置固定连接,所述支架的另一端与所述飞行电机的外表面一侧固定连接,所述桨叶与所述飞行电机的输出轴固定连接,所述机体的下表面边缘处对称设置有四组支撑组件,所述支撑组件包括支腿、弹簧、支杆和支脚,所述支腿的顶端与所述机体的下表面固定连接。本发明中,通过设置摄像组件,可以实现第一摄像头的全方位旋转,使得巡检观察更加全面,设置的伸缩机构

一种城市管网无人机巡检方法及巡检系统.pdf
本发明涉及一种城市管网无人机巡检方法及巡检系统,所述巡检方法包括以下步骤:1)获取巡检区域面积和无人机飞行参数;2)基于所述无人机飞行参数获得无人机定点拍摄参数,根据所述无人机定点拍摄参数将巡检区域面积等分,获得若干巡检区域等分面;3)判断各等分面上各点位拍摄的图像是否包含巡检区域,若是,则保留该点位,若否,则放弃该点位;4)将保留的所有点位相连,构建获得无人机巡检路线;5)基于所述无人机巡检路线完成城市管网巡检,且巡检过程中自动避障。与现有技术相比,本发明具有路线规划效率高、可靠性高、巡检效率高等优点。