
一种架空高压线巡检无人机、无人机巡检方法.pdf

梦影****主a

1/10

2/10

3/10
4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种架空高压线巡检无人机、无人机巡检方法.pdf
本发明公开了一种架空高压线巡检无人机、无人机巡检方法,包括机体,所述机体的四周对称设置有四组飞行组件,每组所述飞行组件包括支架、飞行电机和桨叶,所述支架的一端与所述机体的外表面中间位置固定连接,所述支架的另一端与所述飞行电机的外表面一侧固定连接,所述桨叶与所述飞行电机的输出轴固定连接,所述机体的下表面边缘处对称设置有四组支撑组件,所述支撑组件包括支腿、弹簧、支杆和支脚,所述支腿的顶端与所述机体的下表面固定连接。本发明中,通过设置摄像组件,可以实现第一摄像头的全方位旋转,使得巡检观察更加全面,设置的伸缩机构

一种城市管网无人机巡检方法及巡检系统.pdf
本发明涉及一种城市管网无人机巡检方法及巡检系统,所述巡检方法包括以下步骤:1)获取巡检区域面积和无人机飞行参数;2)基于所述无人机飞行参数获得无人机定点拍摄参数,根据所述无人机定点拍摄参数将巡检区域面积等分,获得若干巡检区域等分面;3)判断各等分面上各点位拍摄的图像是否包含巡检区域,若是,则保留该点位,若否,则放弃该点位;4)将保留的所有点位相连,构建获得无人机巡检路线;5)基于所述无人机巡检路线完成城市管网巡检,且巡检过程中自动避障。与现有技术相比,本发明具有路线规划效率高、可靠性高、巡检效率高等优点。
无人机架空输电线路巡检方法及系统.pdf
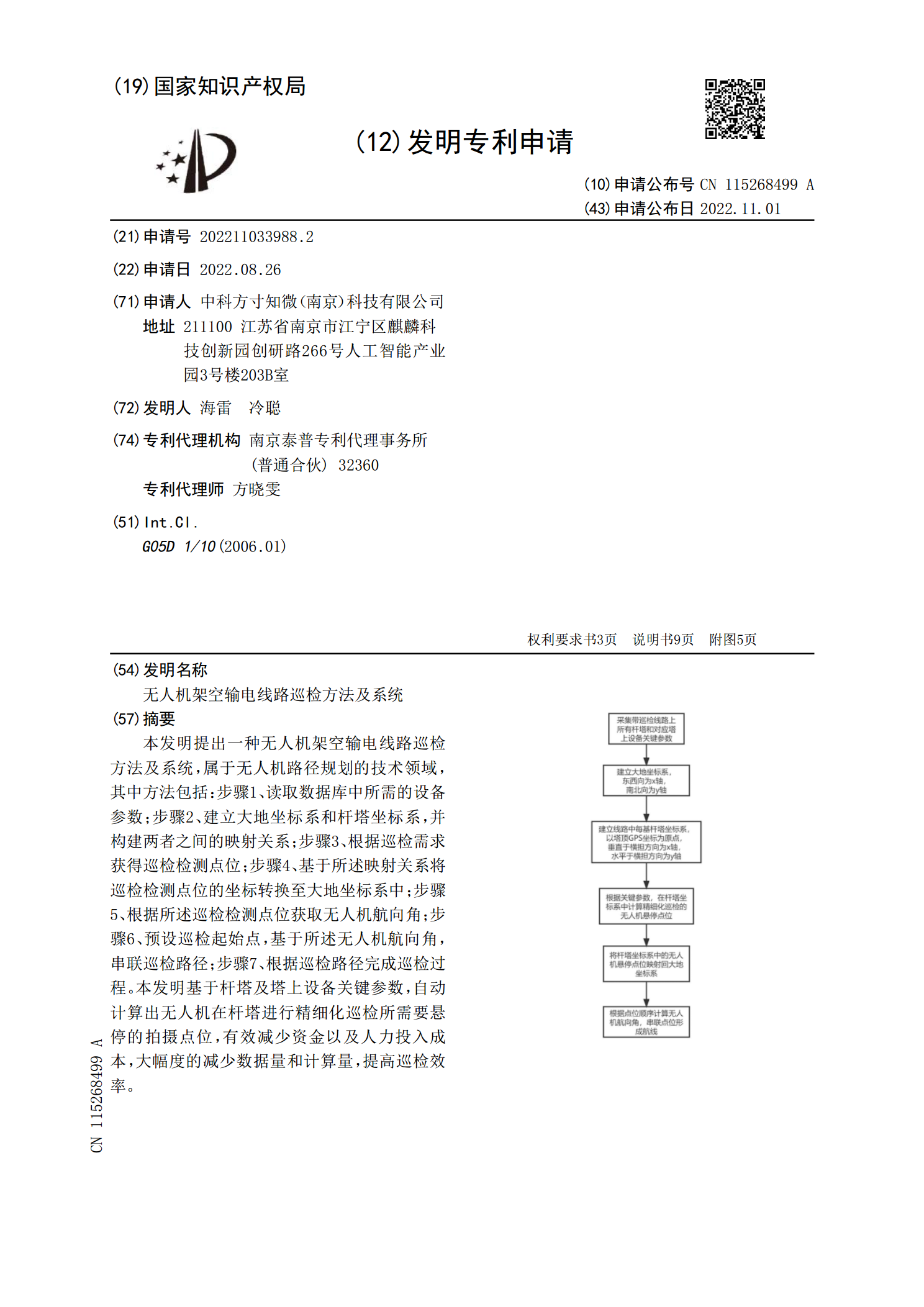
本发明提出一种无人机架空输电线路巡检方法及系统,属于无人机路径规划的技术领域,其中方法包括:步骤1、读取数据库中所需的设备参数;步骤2、建立大地坐标系和杆塔坐标系,并构建两者之间的映射关系;步骤3、根据巡检需求获得巡检检测点位;步骤4、基于所述映射关系将巡检检测点位的坐标转换至大地坐标系中;步骤5、根据所述巡检检测点位获取无人机航向角;步骤6、预设巡检起始点,基于所述无人机航向角,串联巡检路径;步骤7、根据巡检路径完成巡检过程。本发明基于杆塔及塔上设备关键参数,自动计算出无人机在杆塔进行精细化巡检所需要悬
无人机架空输电线路巡检方法及系统.pdf
本发明提出一种无人机架空输电线路巡检方法及系统,属于无人机路径规划的技术领域,其中方法包括:步骤1、读取数据库中所需的设备参数;步骤2、建立大地坐标系和杆塔坐标系,并构建两者之间的映射关系;步骤3、根据巡检需求获得巡检检测点位;步骤4、基于所述映射关系将巡检检测点位的坐标转换至大地坐标系中;步骤5、根据所述巡检检测点位获取无人机航向角;步骤6、预设巡检起始点,基于所述无人机航向角,串联巡检路径;步骤7、根据巡检路径完成巡检过程。本发明基于杆塔及塔上设备关键参数,自动计算出无人机在杆塔进行精细化巡检所需要悬
一种巡检无人机.pdf
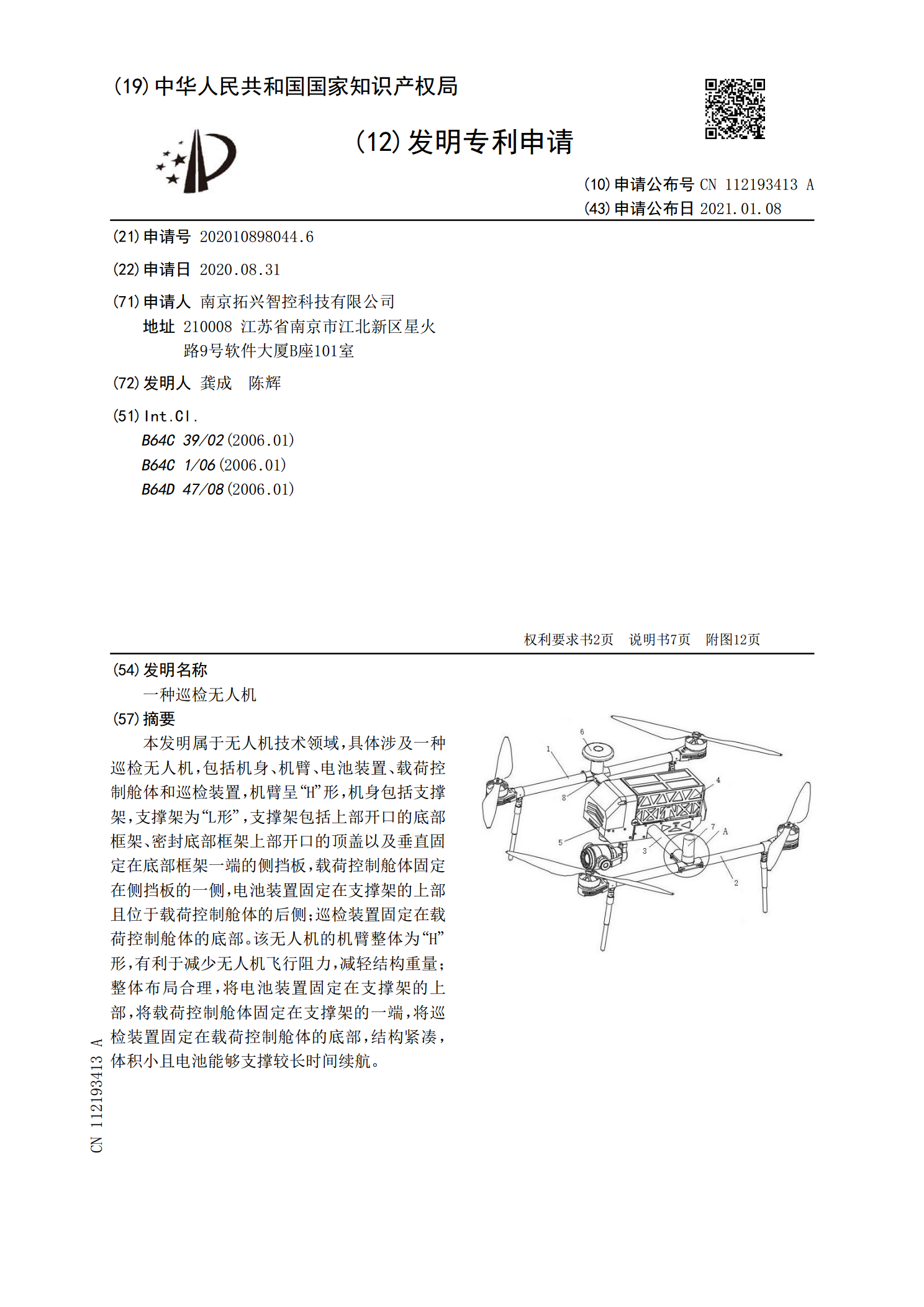
本发明属于无人机技术领域,具体涉及一种巡检无人机,包括机身、机臂、电池装置、载荷控制舱体和巡检装置,机臂呈“H”形,机身包括支撑架,支撑架为“L形”,支撑架包括上部开口的底部框架、密封底部框架上部开口的顶盖以及垂直固定在底部框架一端的侧挡板,载荷控制舱体固定在侧挡板的一侧,电池装置固定在支撑架的上部且位于载荷控制舱体的后侧;巡检装置固定在载荷控制舱体的底部。该无人机的机臂整体为“H”形,有利于减少无人机飞行阻力,减轻结构重量;整体布局合理,将电池装置固定在支撑架的上部,将载荷控制舱体固定在支撑架的一端,将