
控制方法及装置、车辆和可读存储介质.pdf

是你****盟主

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
控制方法及装置、车辆和可读存储介质.pdf
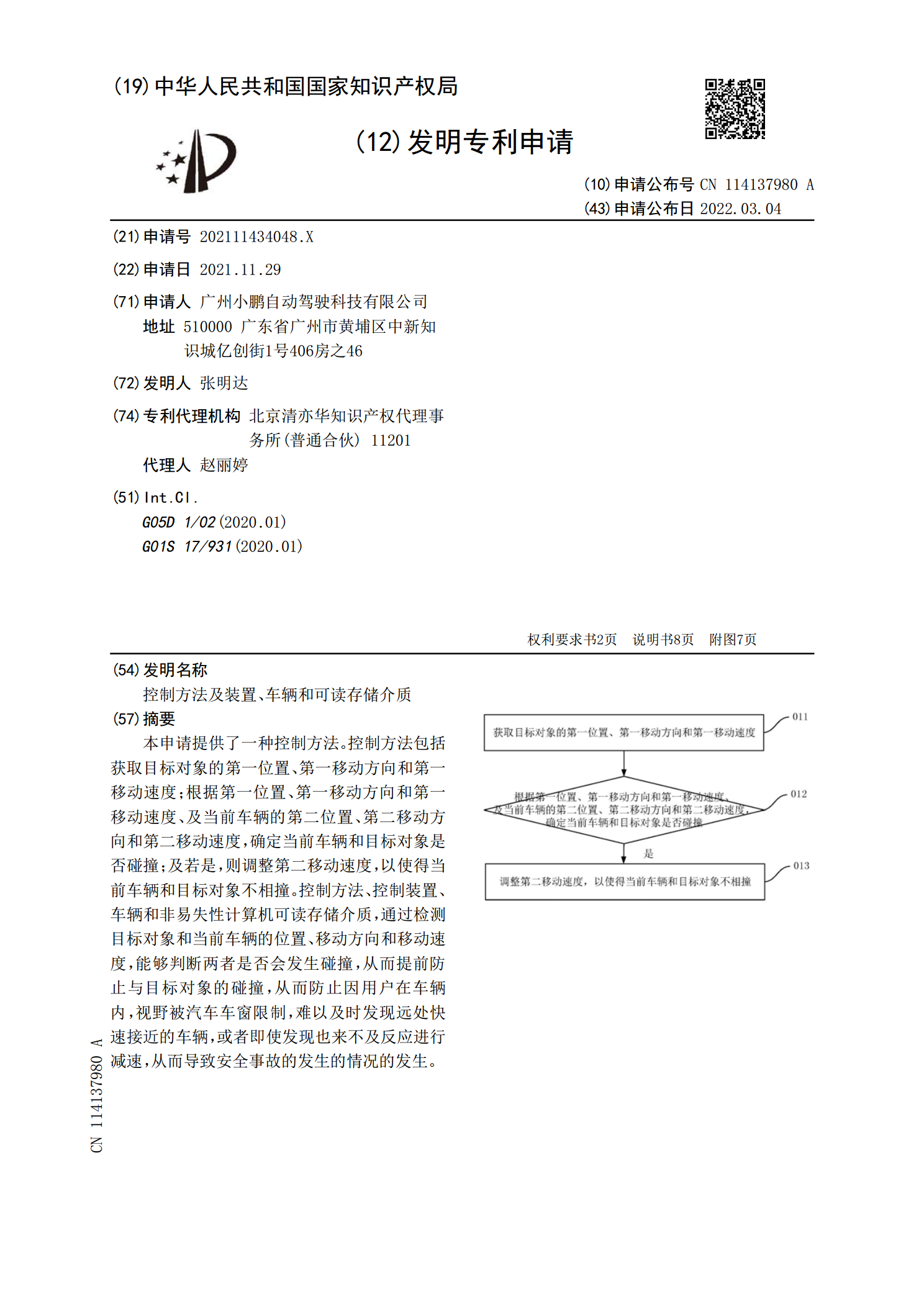
本申请提供了一种控制方法。控制方法包括获取目标对象的第一位置、第一移动方向和第一移动速度;根据第一位置、第一移动方向和第一移动速度、及当前车辆的第二位置、第二移动方向和第二移动速度,确定当前车辆和目标对象是否碰撞;及若是,则调整第二移动速度,以使得当前车辆和目标对象不相撞。控制方法、控制装置、车辆和非易失性计算机可读存储介质,通过检测目标对象和当前车辆的位置、移动方向和移动速度,能够判断两者是否会发生碰撞,从而提前防止与目标对象的碰撞,从而防止因用户在车辆内,视野被汽车车窗限制,难以及时发现远处快速接近的

车辆变道的控制方法、控制装置、车辆和可读存储介质.pdf
本发明提供了一种车辆变道的控制方法、控制装置、车辆和可读存储介质,其中,车辆变道的控制方法包括:获取车辆的驾驶盲区中的障碍物信息;根据障碍物信息,确定障碍物的种类信息;确定车辆与障碍物的安全变道距离;根据障碍物的种类信息和安全变道距离,确定车辆的行进方向,根据障碍物的种类信息和安全变道距离,确定车辆的行进方向,有效提高了工程车辆在转向过程中的安全性,避免工程车辆与障碍物发生碰撞,提高驾驶员的驾驶安全性。

动力驱动控制方法、装置、车辆和可读存储介质.pdf
本发明提供了一种动力驱动控制方法、装置、车辆和可读存储介质,涉及车辆动力控制的技术领域,包括对能量型电池输出的第一功率进行监测;判断第一功率是否满足目标需求功率;当第一功率满足目标需求功率时,将第一功率提供给第二驱动电机,以使第二驱动电机为当前车辆提供驱动;当第一功率不满足目标需求功率时,控制功率型电池输出第二功率,将第一功率提供给第二驱动电机,以及将第二功率提供第一驱动电机提供电能,以使第一驱动电机和第二驱动电机共同为当前车辆提供驱动,以缓解了当前车辆无法既满足加速性能同时满足续航性能的技术问题。
车辆巡航控制方法、装置、车辆及可读存储介质.pdf
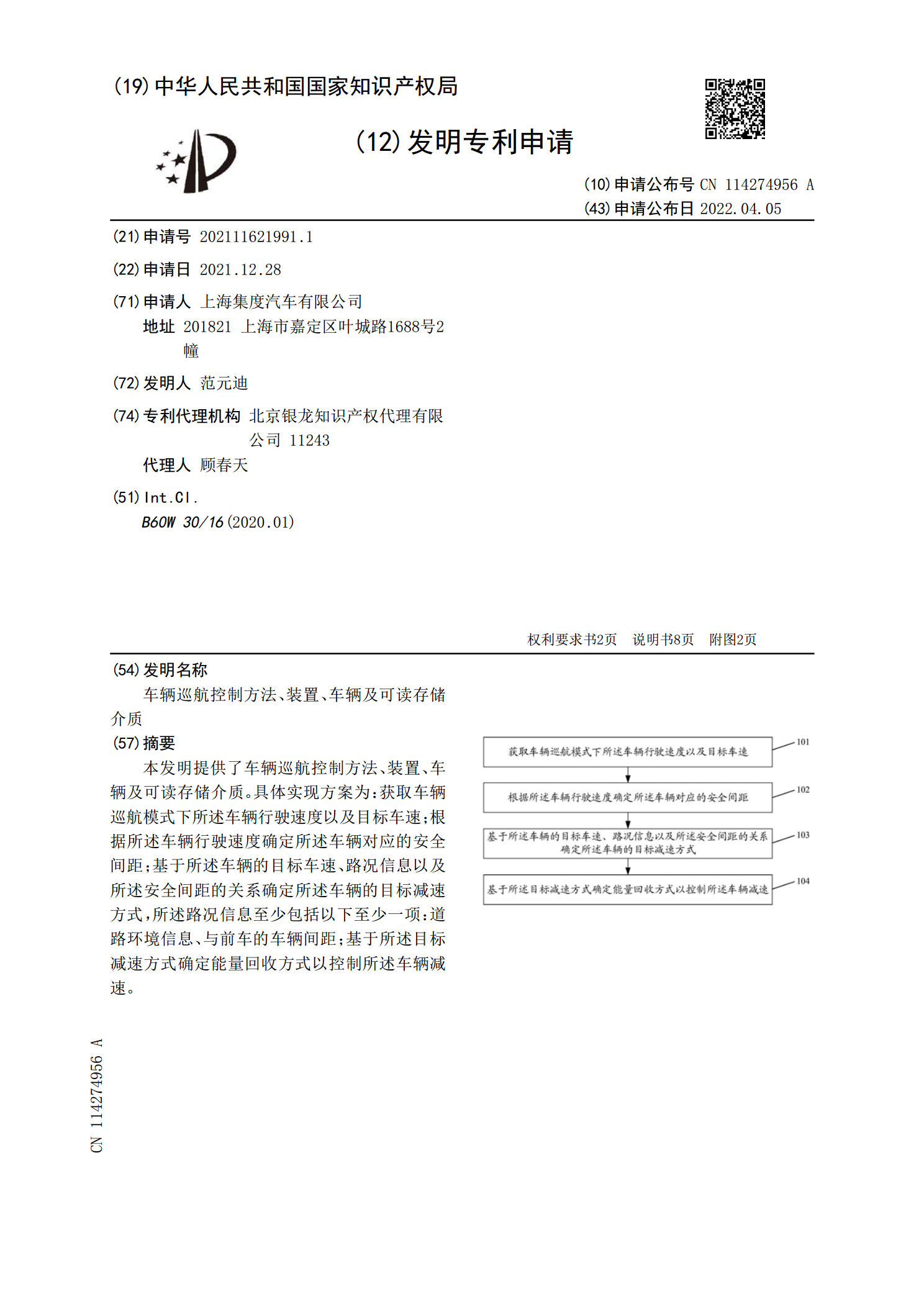
本发明提供了车辆巡航控制方法、装置、车辆及可读存储介质。具体实现方案为:获取车辆巡航模式下所述车辆行驶速度以及目标车速;根据所述车辆行驶速度确定所述车辆对应的安全间距;基于所述车辆的目标车速、路况信息以及所述安全间距的关系确定所述车辆的目标减速方式,所述路况信息至少包括以下至少一项:道路环境信息、与前车的车辆间距;基于所述目标减速方式确定能量回收方式以控制所述车辆减速。
车辆升级方法、装置、车辆和可读存储介质.pdf
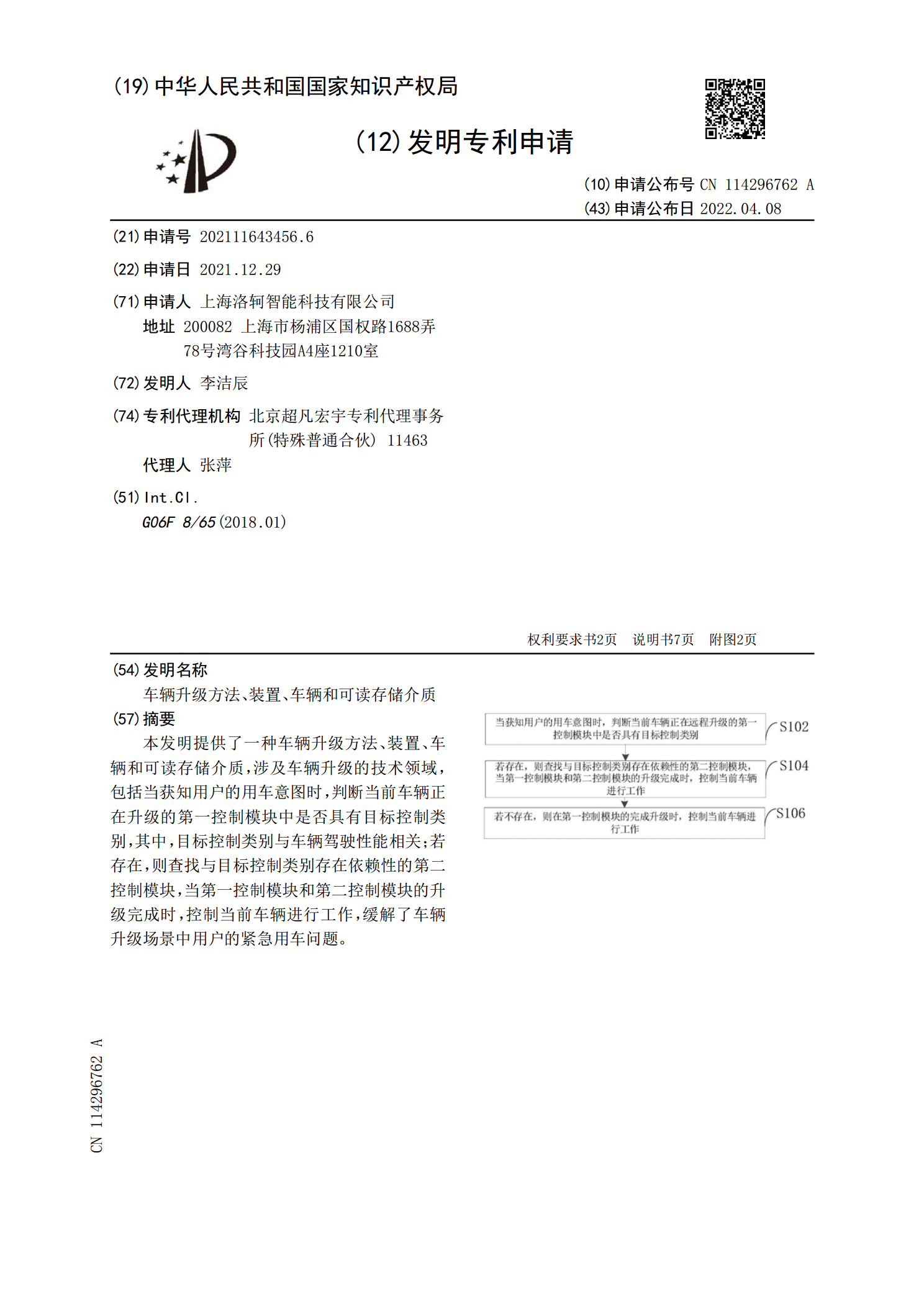
本发明提供了一种车辆升级方法、装置、车辆和可读存储介质,涉及车辆升级的技术领域,包括当获知用户的用车意图时,判断当前车辆正在升级的第一控制模块中是否具有目标控制类别,其中,目标控制类别与车辆驾驶性能相关;若存在,则查找与目标控制类别存在依赖性的第二控制模块,当第一控制模块和第二控制模块的升级完成时,控制当前车辆进行工作,缓解了车辆升级场景中用户的紧急用车问题。