
飞行器的飞行重量监测方法、系统、存储介质及电子设备.pdf

努力****幻翠

1/10

2/10
3/10
4/10
5/10
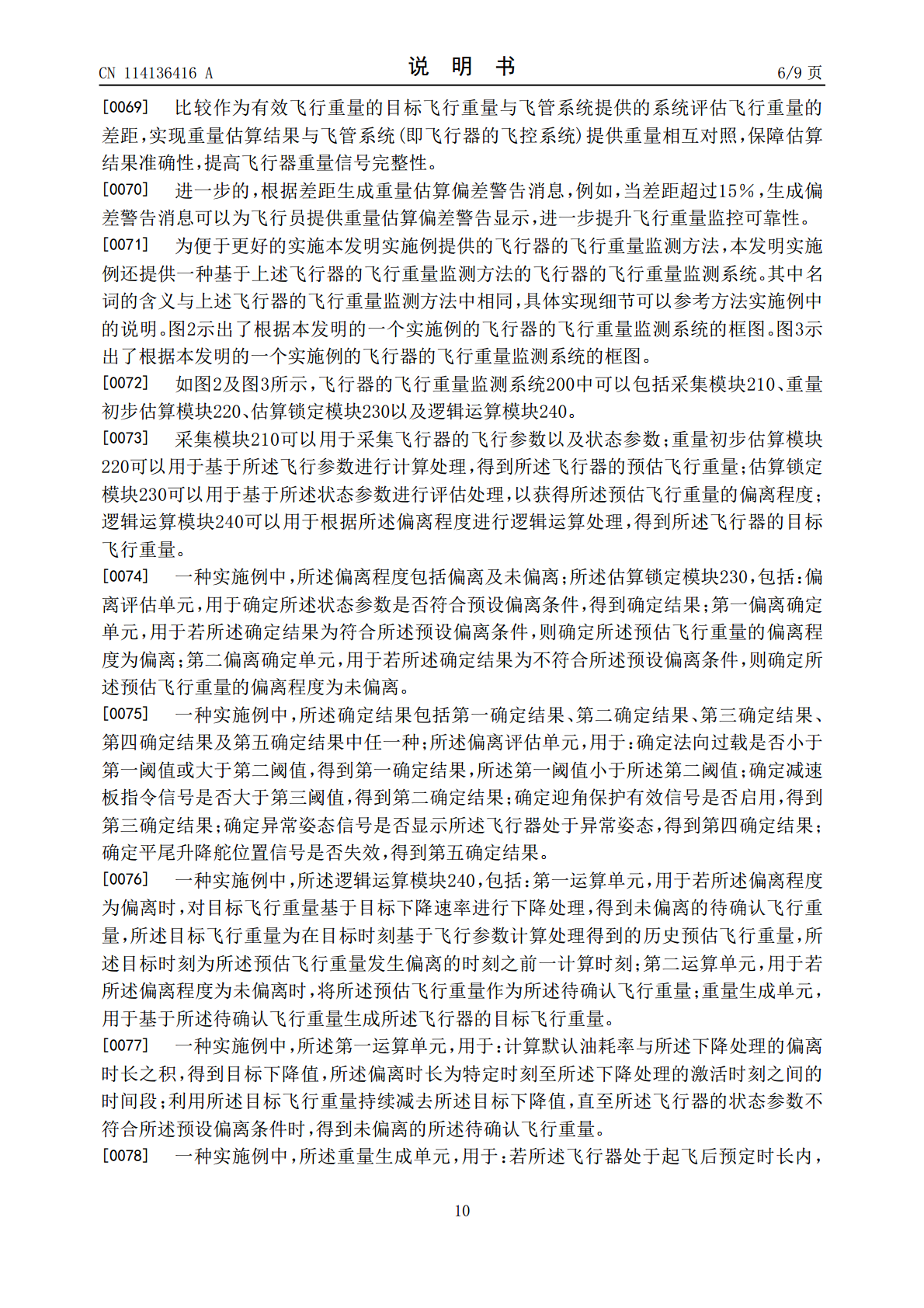
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
飞行器的飞行重量监测方法、系统、存储介质及电子设备.pdf
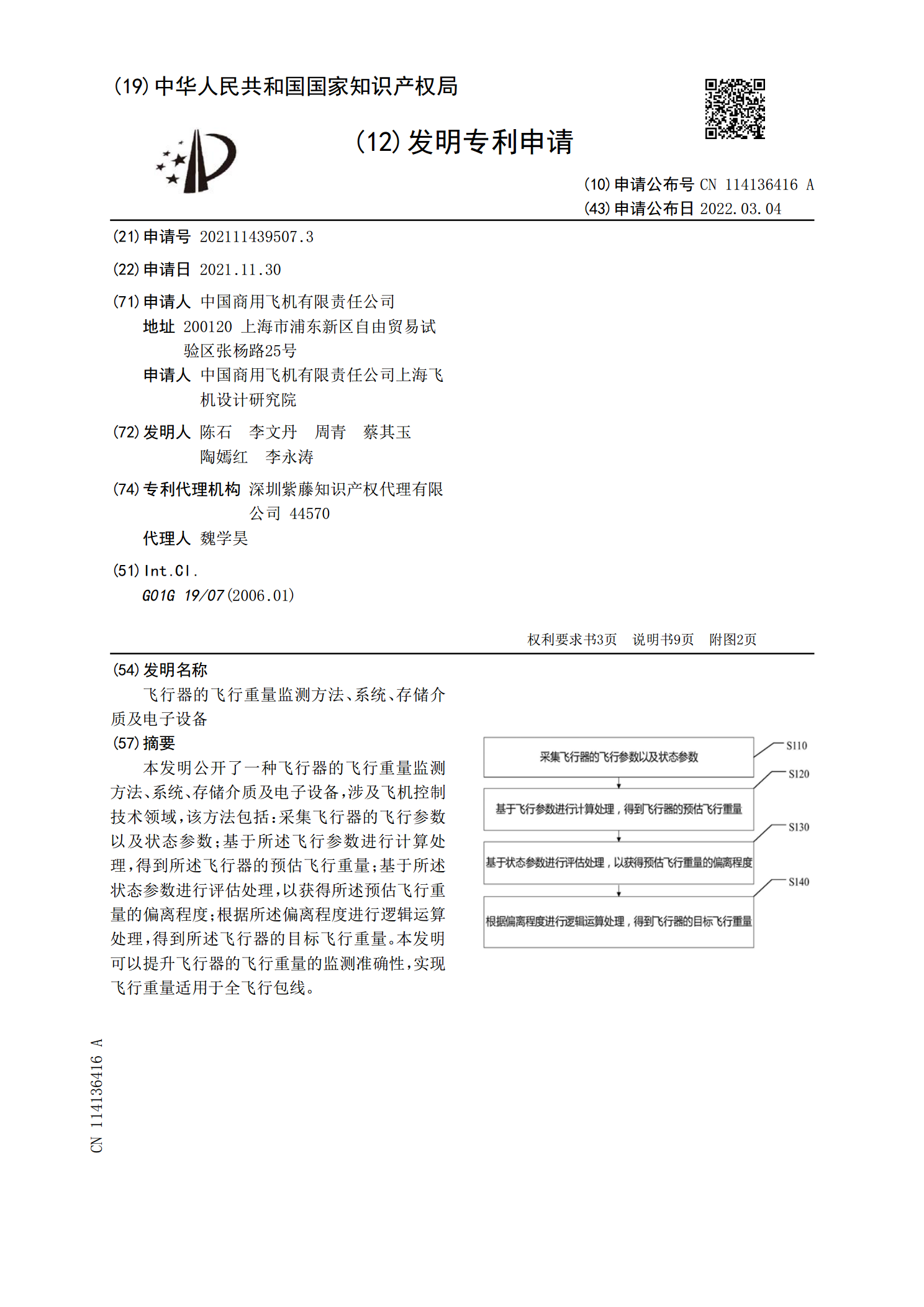
本发明公开了一种飞行器的飞行重量监测方法、系统、存储介质及电子设备,涉及飞机控制技术领域,该方法包括:采集飞行器的飞行参数以及状态参数;基于所述飞行参数进行计算处理,得到所述飞行器的预估飞行重量;基于所述状态参数进行评估处理,以获得所述预估飞行重量的偏离程度;根据所述偏离程度进行逻辑运算处理,得到所述飞行器的目标飞行重量。本发明可以提升飞行器的飞行重量的监测准确性,实现飞行重量适用于全飞行包线。
飞行器视景增强的显示方法、系统、飞行器及存储介质.pdf
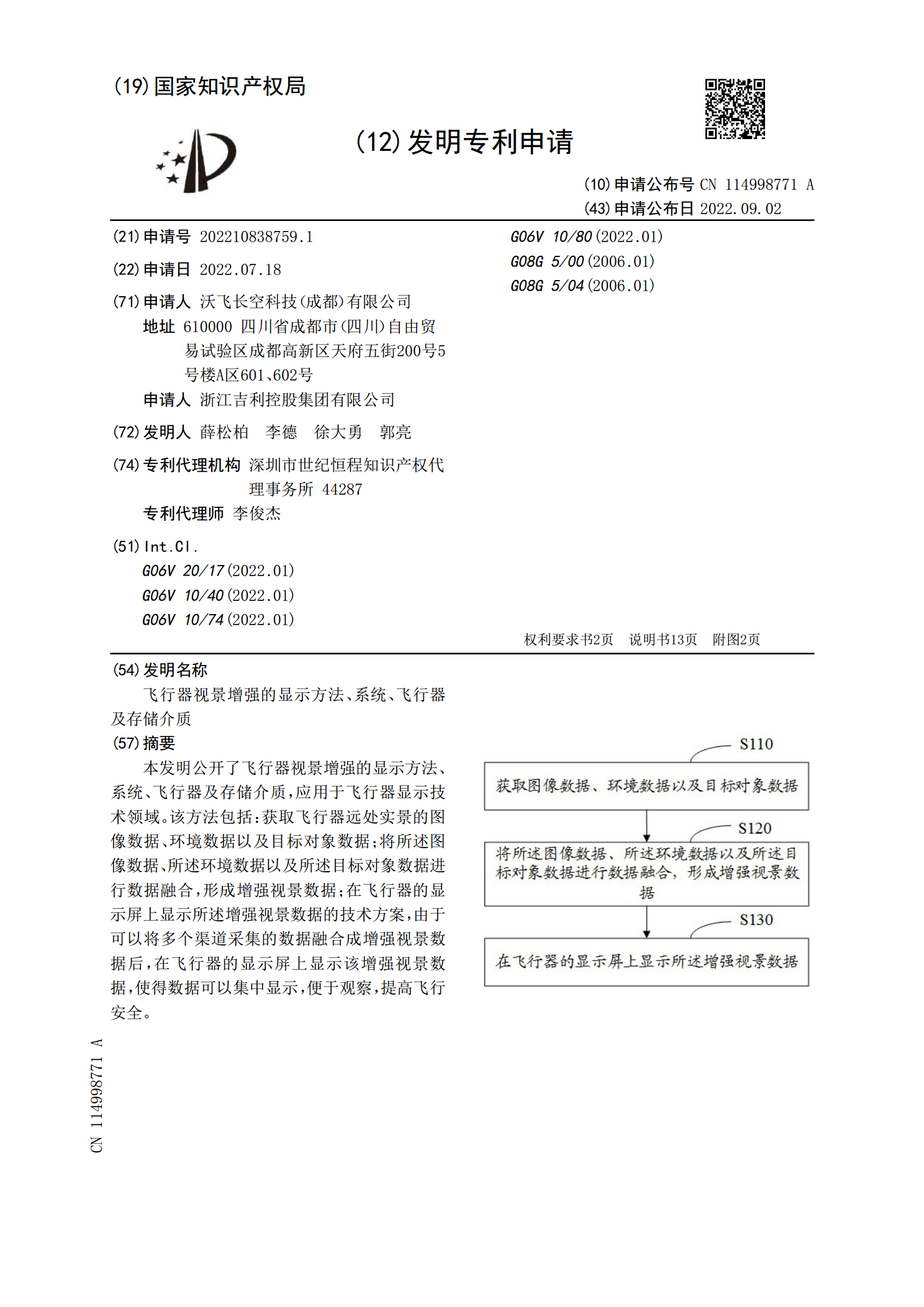
本发明公开了飞行器视景增强的显示方法、系统、飞行器及存储介质,应用于飞行器显示技术领域。该方法包括:获取飞行器远处实景的图像数据、环境数据以及目标对象数据;将所述图像数据、所述环境数据以及所述目标对象数据进行数据融合,形成增强视景数据;在飞行器的显示屏上显示所述增强视景数据的技术方案,由于可以将多个渠道采集的数据融合成增强视景数据后,在飞行器的显示屏上显示该增强视景数据,使得数据可以集中显示,便于观察,提高飞行安全。

飞行器测控接入的控制方法、电子设备及存储介质.pdf
本公开提供一种飞行器测控接入的控制方法、电子设备及存储介质,该方法包括,每个飞行器根据需要的服务时间与最大停留时间确定飞行器的优先级,根据优先级确定初始退避窗口和窗口增长因子,并根据初始退避窗口、窗口增长因子以及当前退避次数确定当前退避次数对应的退避窗口;根据当前退避次数对应的退避窗口,向测控平台发送接入请求信息;测控平台接收所有飞行器发送的接入请求信息,并基于接入请求信息与通道占用信息,控制每个飞行器的接入,通过对不同的飞行器设置不同的优先级,保证了速度各异的各个飞行器均能达到测控业务需求,同时通过设置
飞行器轨迹确定方法、装置、电子设备及存储介质.pdf
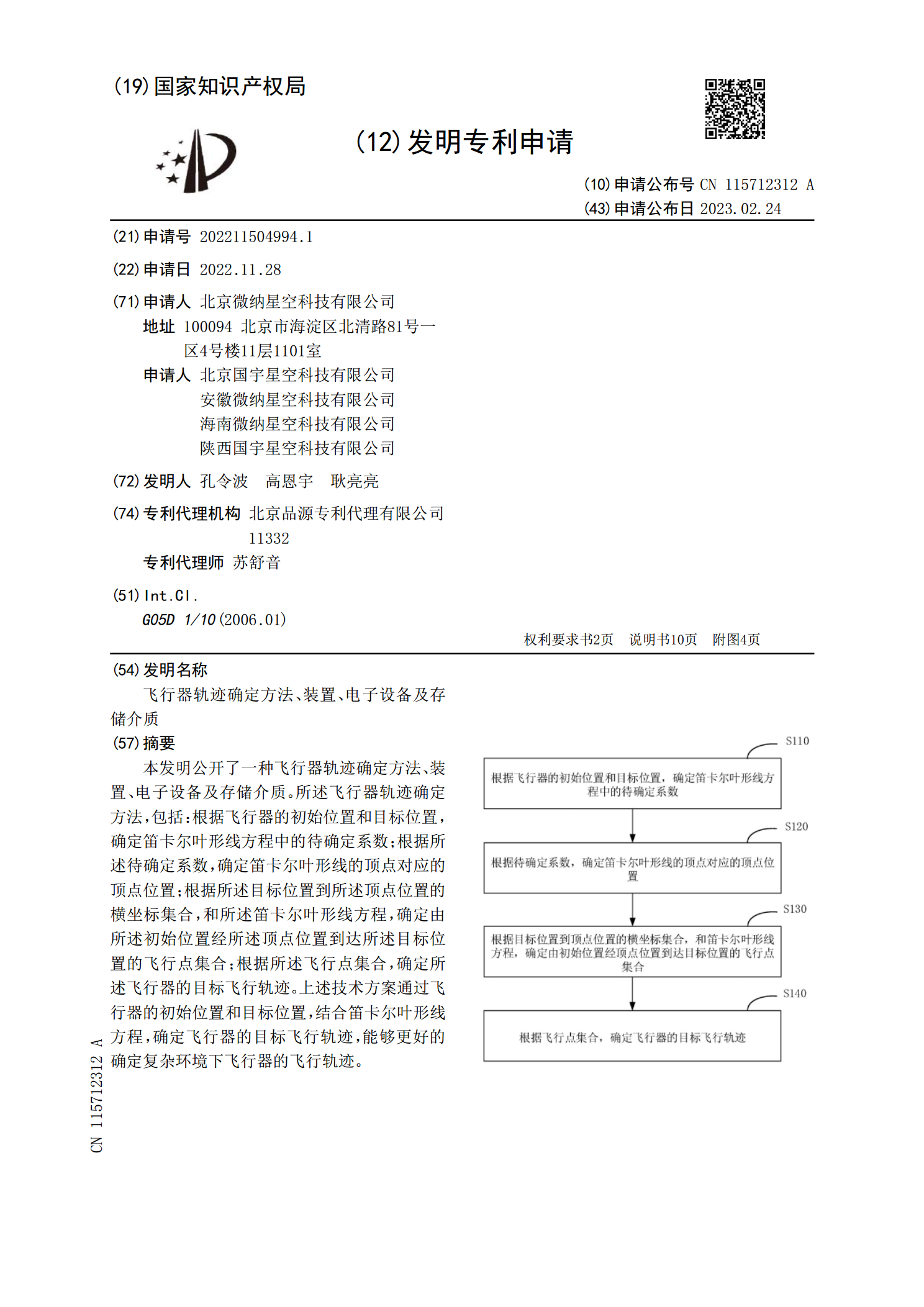
本发明公开了一种飞行器轨迹确定方法、装置、电子设备及存储介质。所述飞行器轨迹确定方法,包括:根据飞行器的初始位置和目标位置,确定笛卡尔叶形线方程中的待确定系数;根据所述待确定系数,确定笛卡尔叶形线的顶点对应的顶点位置;根据所述目标位置到所述顶点位置的横坐标集合,和所述笛卡尔叶形线方程,确定由所述初始位置经所述顶点位置到达所述目标位置的飞行点集合;根据所述飞行点集合,确定所述飞行器的目标飞行轨迹。上述技术方案通过飞行器的初始位置和目标位置,结合笛卡尔叶形线方程,确定飞行器的目标飞行轨迹,能够更好的确定复杂环

一种无人飞行器控制方法、装置、电子设备及存储介质.pdf
本发明实施例提供了一种无人飞行器控制方法、装置、电子设备及存储介质,通过无人飞行器用于生成针对无人飞行器的上行链路同步信息,并向基站设备发送上行链路同步信息,通过基站设备获取针对无人机的巡航任务参数;接收上行链路同步信息;从上行链路同步信息中确定出针对无人飞行器的最大时间提前量值;通过最大时间提前量值计算出基站设备与无人飞行器之间的距离;基于距离和巡航任务参数计算针对无人飞行器的第一波束倾角值;通过第一波束倾角值向无人飞行器发送控制信号;无人飞行器用于接收控制信号;控制信号用于控制无人飞行器,从而提升了通