
一种配送通知方法、装置、机器人和存储介质.pdf

一只****懿呀

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种配送通知方法、装置、机器人和存储介质.pdf
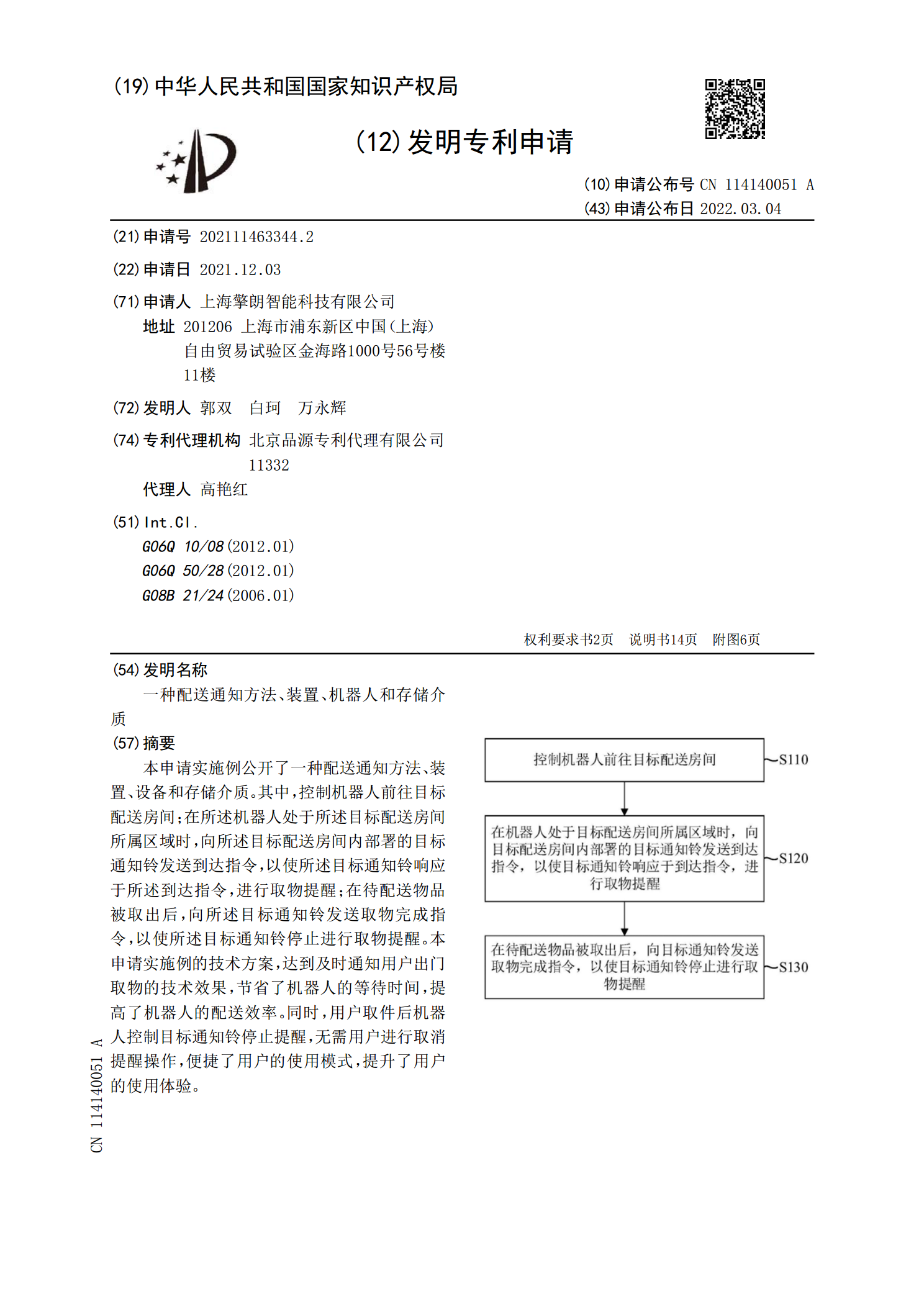
本申请实施例公开了一种配送通知方法、装置、设备和存储介质。其中,控制机器人前往目标配送房间;在所述机器人处于所述目标配送房间所属区域时,向所述目标配送房间内部署的目标通知铃发送到达指令,以使所述目标通知铃响应于所述到达指令,进行取物提醒;在待配送物品被取出后,向所述目标通知铃发送取物完成指令,以使所述目标通知铃停止进行取物提醒。本申请实施例的技术方案,达到及时通知用户出门取物的技术效果,节省了机器人的等待时间,提高了机器人的配送效率。同时,用户取件后机器人控制目标通知铃停止提醒,无需用户进行取消提醒操作,
配送方法、装置、机器人和存储介质.pdf
本发明公开了一种配送方法、装置、机器人和存储介质。配送方法包括:机器人移动到目标配送区域,并提示用户取物;根据所述机器人的承载装置在不同时刻的承重,确定所述目标配送区域对应的物品的取走结果;在所述取走结果为正确取物的情况下,所述机器人执行下一配送任务。本发明实施例实现降低配送的人工成本,提高配送的效率。
路径规划方法、装置、机器人和存储介质.pdf
本申请公开了一种路径规划方法、装置、机器人和存储介质,应用于机器人。方法包括:构建局部地图;将局部地图划分为多个网格,局部地图包括第一位置、第二位置和障碍物位置;将第一位置所在网格作为第一目标网络添加到路径列表;确定该多个网格中的至少一个第二目标网格,第二目标网格是与第二位置所在网格的距离小于第一目标网格与第二位置所在网格的距离,且不是障碍物位置所在网格;将移动代价最小的第二目标网格添加到路径列表;若最新添加到路径列表的第二目标网格是第二位置所在网格,则根据路径列表中的所有网格,在局部地图中确定局部路径。
拍摄方法及装置、机器人和可读存储介质.pdf
本申请提出了一种拍摄方法及装置、机器人和可读存储介质。拍摄方法包括:确定目标场景内的目标对象;基于目标对象确定第一拍摄参数;基于第一拍摄参数确定第一构图区域;在第一构图区域中,基于目标场景中一个或者多个第一对象的位置信息确定目标拍摄参数,并根据目标拍摄参数进行拍摄。通过本申请提供的技术方案能够在拍摄过程中自动进行构图,从而确定最佳的拍摄参数,实现了智能化的自主拍摄。

机器人控制方法、装置、机器人和存储介质.pdf
本申请实施例公开了一种机器人控制方法、装置、机器人和存储介质,涉及控制领域。该方法包括:在机器人所在区域的电梯门开启后,根据预设路径,控制机器人移动且自转,以采集轿厢内部的至少两个视场角度的目标图像;依次对各所述目标图像进行人物标定和追踪,并根据标定和追踪结果,确定所述轿厢中的目标乘梯人数;根据所述目标乘梯人数,对所述机器人进行乘梯控制。本申请提高了确定结果准确度,同时避免了机器人等待时间过长对机器人,同时减少了无效乘梯过多对电梯的作业效率的影响,从而提高了机器人和电梯的作业效率。