
车辆防滑控制方法和装置.pdf

森林****io


1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆防滑控制方法和装置.pdf
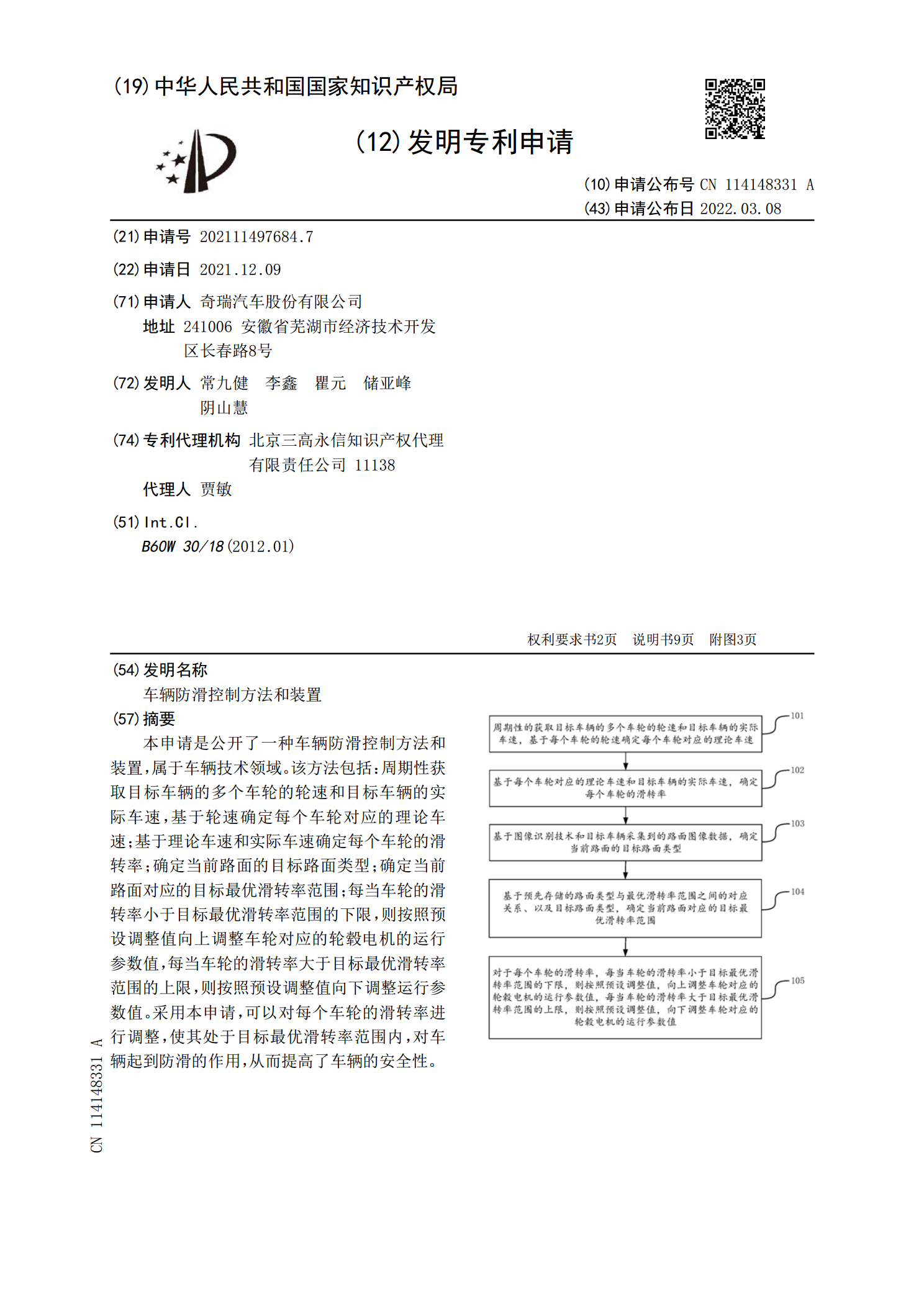
本申请是公开了一种车辆防滑控制方法和装置,属于车辆技术领域。该方法包括:周期性获取目标车辆的多个车轮的轮速和目标车辆的实际车速,基于轮速确定每个车轮对应的理论车速;基于理论车速和实际车速确定每个车轮的滑转率;确定当前路面的目标路面类型;确定当前路面对应的目标最优滑转率范围;每当车轮的滑转率小于目标最优滑转率范围的下限,则按照预设调整值向上调整车轮对应的轮毂电机的运行参数值,每当车轮的滑转率大于目标最优滑转率范围的上限,则按照预设调整值向下调整运行参数值。采用本申请,可以对每个车轮的滑转率进行调整,使其处于
车辆及其防滑系统和防滑控制方法.pdf
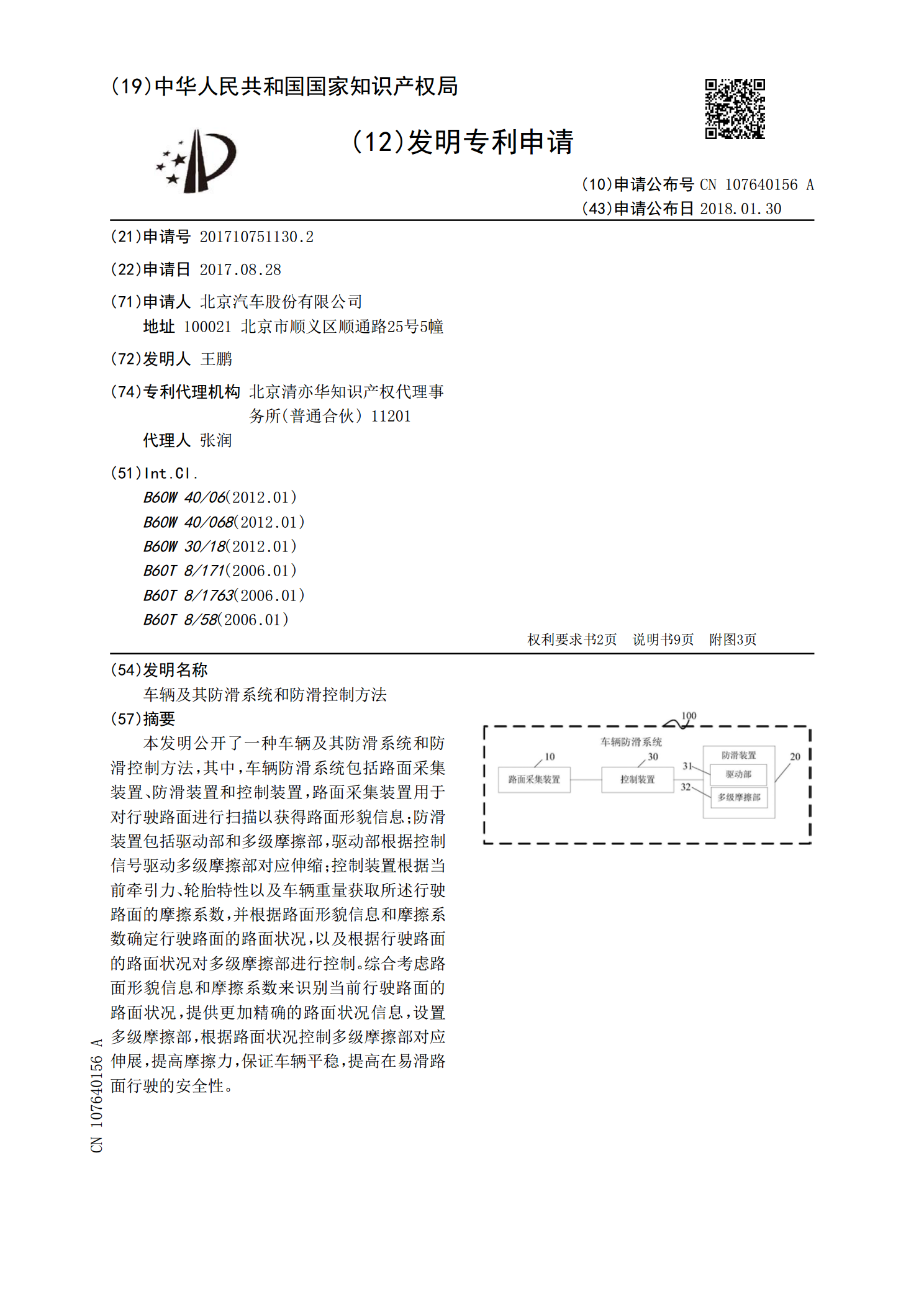
本发明公开了一种车辆及其防滑系统和防滑控制方法,其中,车辆防滑系统包括路面采集装置、防滑装置和控制装置,路面采集装置用于对行驶路面进行扫描以获得路面形貌信息;防滑装置包括驱动部和多级摩擦部,驱动部根据控制信号驱动多级摩擦部对应伸缩;控制装置根据当前牵引力、轮胎特性以及车辆重量获取所述行驶路面的摩擦系数,并根据路面形貌信息和摩擦系数确定行驶路面的路面状况,以及根据行驶路面的路面状况对多级摩擦部进行控制。综合考虑路面形貌信息和摩擦系数来识别当前行驶路面的路面状况,提供更加精确的路面状况信息,设置多级摩擦部,根
防滑扭矩控制方法、装置及车辆.pdf
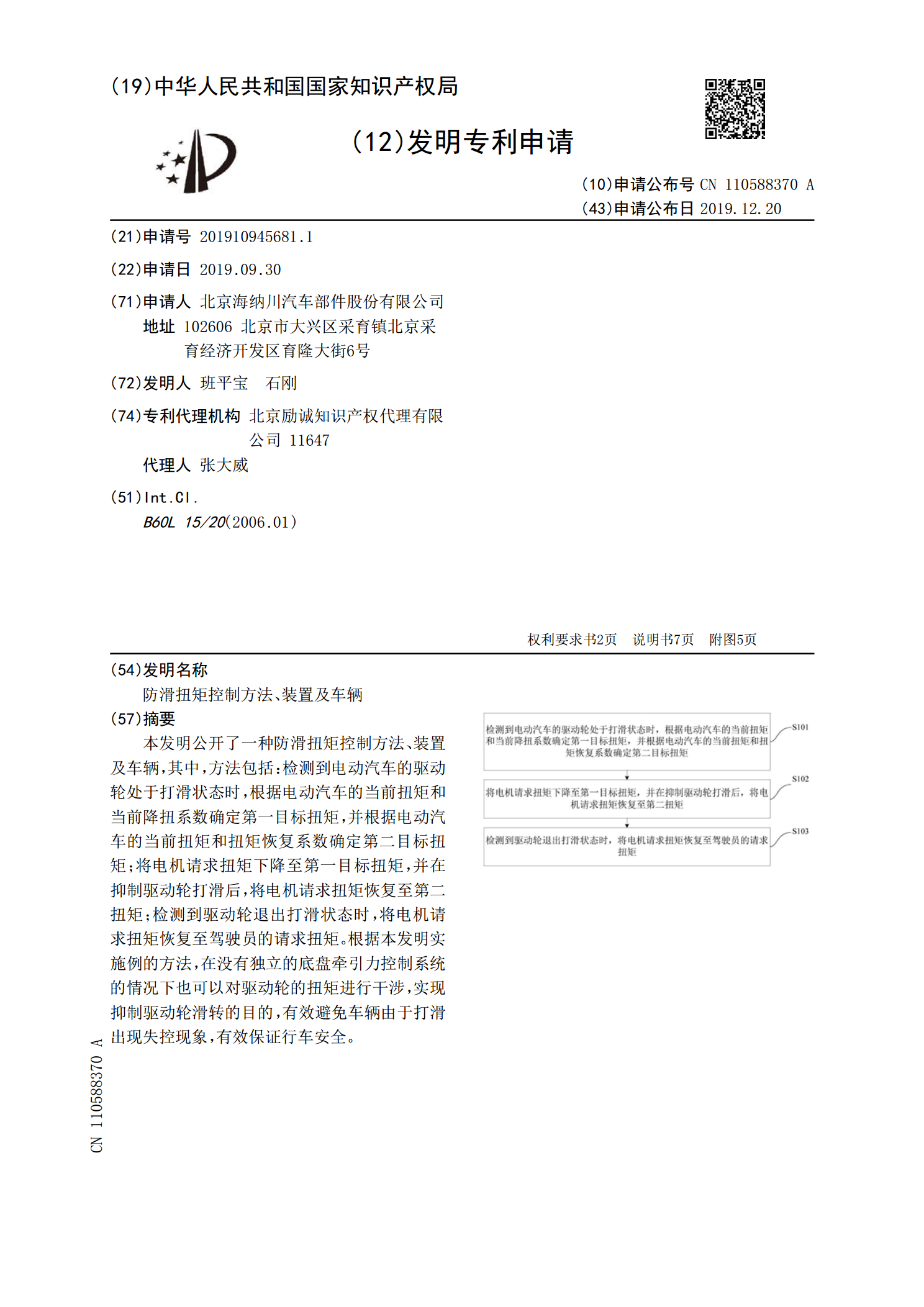
本发明公开了一种防滑扭矩控制方法、装置及车辆,其中,方法包括:检测到电动汽车的驱动轮处于打滑状态时,根据电动汽车的当前扭矩和当前降扭系数确定第一目标扭矩,并根据电动汽车的当前扭矩和扭矩恢复系数确定第二目标扭矩;将电机请求扭矩下降至第一目标扭矩,并在抑制驱动轮打滑后,将电机请求扭矩恢复至第二扭矩;检测到驱动轮退出打滑状态时,将电机请求扭矩恢复至驾驶员的请求扭矩。根据本发明实施例的方法,在没有独立的底盘牵引力控制系统的情况下也可以对驱动轮的扭矩进行干涉,实现抑制驱动轮滑转的目的,有效避免车辆由于打滑出现失控现
车辆防滑控制装置.pdf
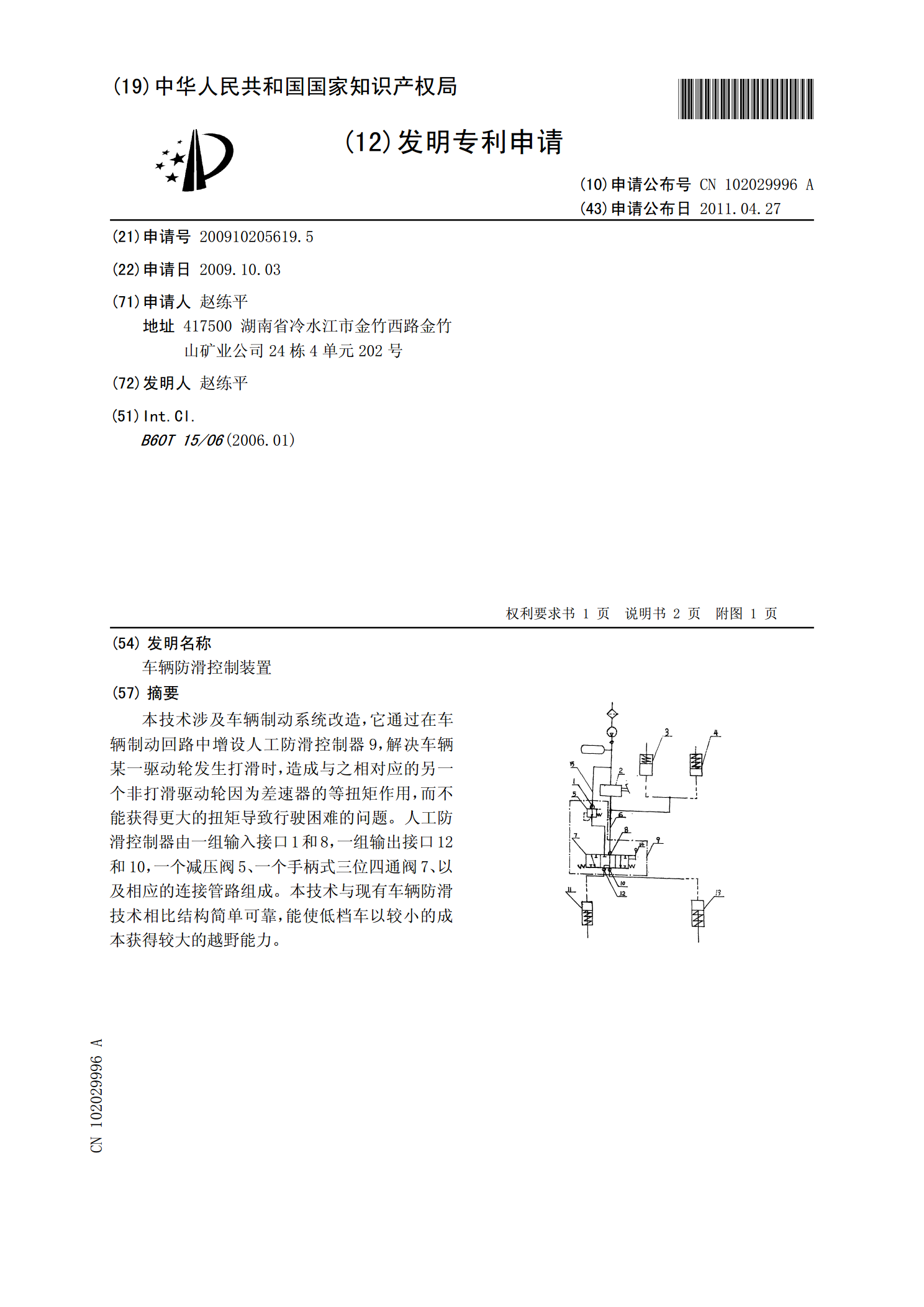
本技术涉及车辆制动系统改造,它通过在车辆制动回路中增设人工防滑控制器9,解决车辆某一驱动轮发生打滑时,造成与之相对应的另一个非打滑驱动轮因为差速器的等扭矩作用,而不能获得更大的扭矩导致行驶困难的问题。人工防滑控制器由一组输入接口1和8,一组输出接口12和10,一个减压阀5、一个手柄式三位四通阀7、以及相应的连接管路组成。本技术与现有车辆防滑技术相比结构简单可靠,能使低档车以较小的成本获得较大的越野能力。
车辆的防滑控制装置.pdf
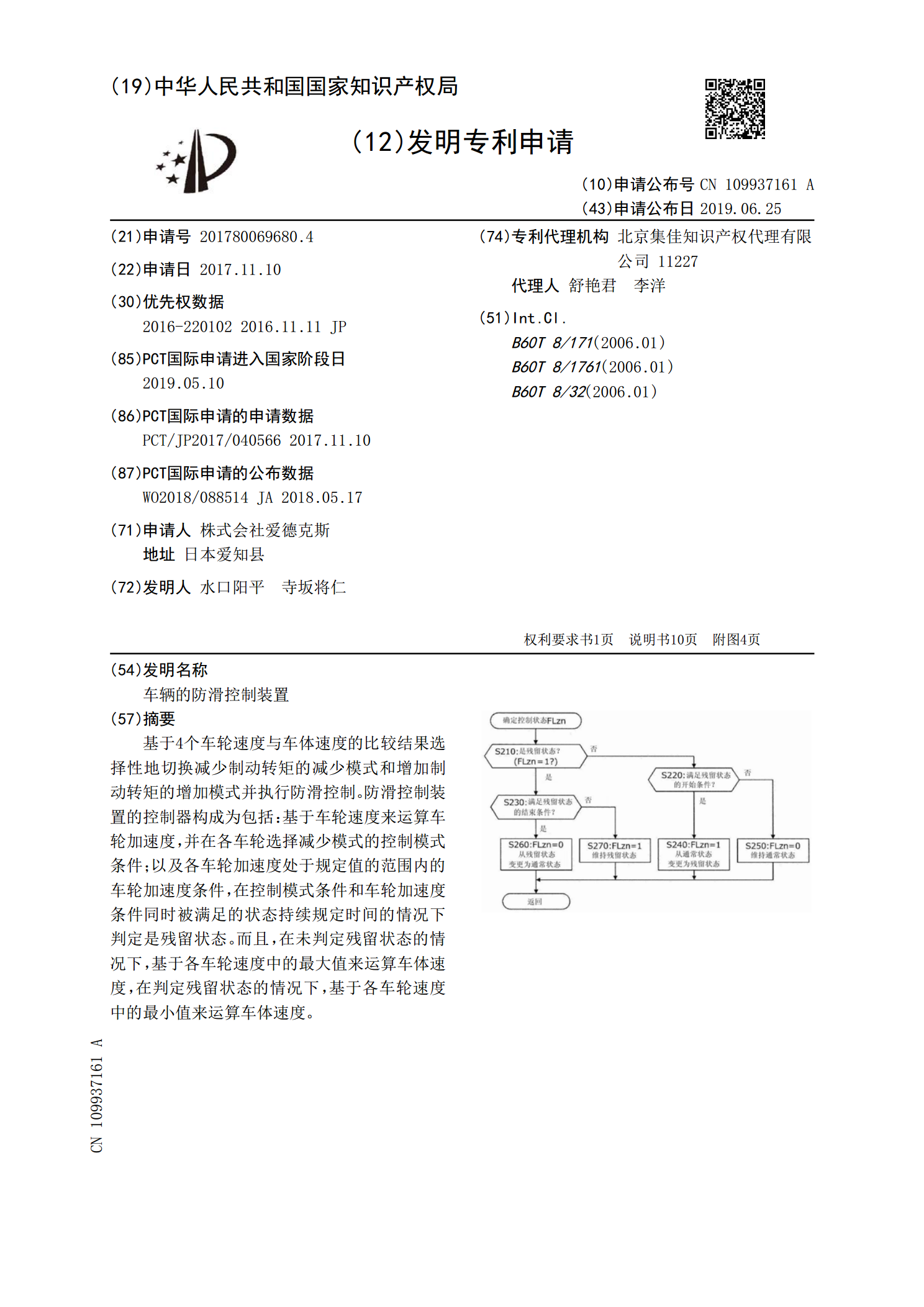
基于4个车轮速度与车体速度的比较结果选择性地切换减少制动转矩的减少模式和增加制动转矩的增加模式并执行防滑控制。防滑控制装置的控制器构成为包括:基于车轮速度来运算车轮加速度,并在各车轮选择减少模式的控制模式条件;以及各车轮加速度处于规定值的范围内的车轮加速度条件,在控制模式条件和车轮加速度条件同时被满足的状态持续规定时间的情况下判定是残留状态。而且,在未判定残留状态的情况下,基于各车轮速度中的最大值来运算车体速度,在判定残留状态的情况下,基于各车轮速度中的最小值来运算车体速度。