
车辆续航辅助控制方法、系统、存储介质及车辆.pdf

是你****优呀

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆续航辅助控制方法、系统、存储介质及车辆.pdf
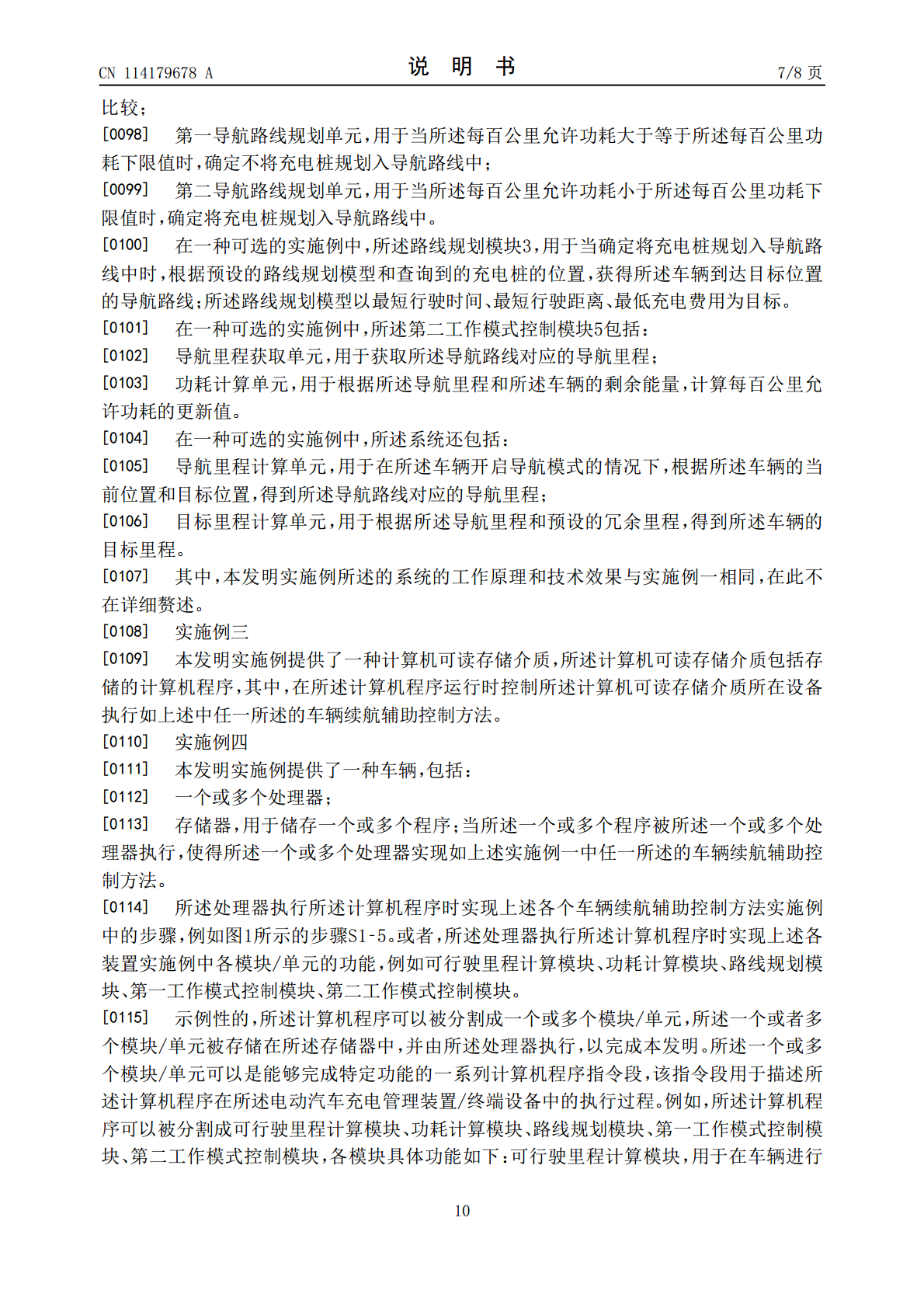
本发明提供了一种车辆续航辅助控制方法、系统、存储介质及车辆,该方法包括:在规划导航路线时,根据车辆的剩余能量,计算在当前驾驶习惯下的可行驶里程;当可行驶里程小于等于车辆的目标里程时,根据目标里程和剩余能量,计算每百公里允许功耗;根据每百公里允许功耗和每百公里功耗下限值,判断是否将充电桩规划入导航路线中;若否,输出导航路线,根据每百公里允许功耗控制各个功能域下子功能的工作模式;若是,输出有充电桩的导航路线,根据导航路线更新每百公里允许功耗,根据更新后的每百公里允许功耗控制各个功能域下子功能的工作模式;本发明
车辆的盲区辅助系统评价方法、装置、车辆及存储介质.pdf
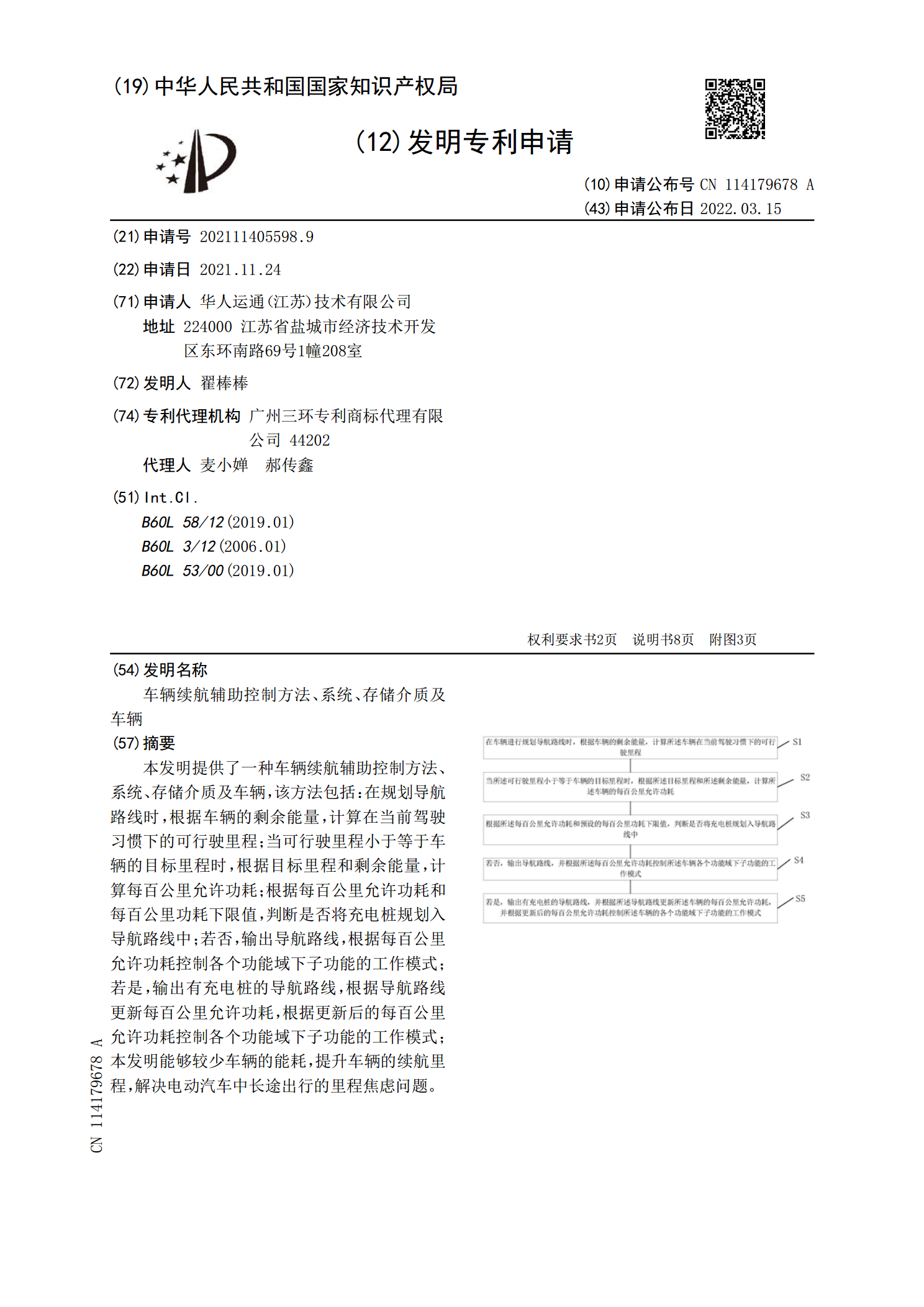
本申请涉及车辆技术领域,特别涉及一种车辆的盲区辅助系统评价方法、装置、车辆及存储介质,方法包括:在预设的交通测试场景下,控制待评价车辆和目标车以每个测试项目对应的测试速度行驶;控制待评价车辆进入盲区辅助系统,并采集当前测试项目的测试过程中的预警强度信息、预警时刻信息、预警漏报信息;根据一项或多项测试项目的预警强度信息、预警时刻信息、预警漏报信息,结合当前测试项目的评分,生成待评价车辆的盲区辅助系统的评价结果。由此,解决了相关技术中无法准确评价车辆的车辆盲区辅助系统的综合能力,导致用户行车出现安全隐患的问题
车辆控制系统、车辆控制方法及存储介质.pdf
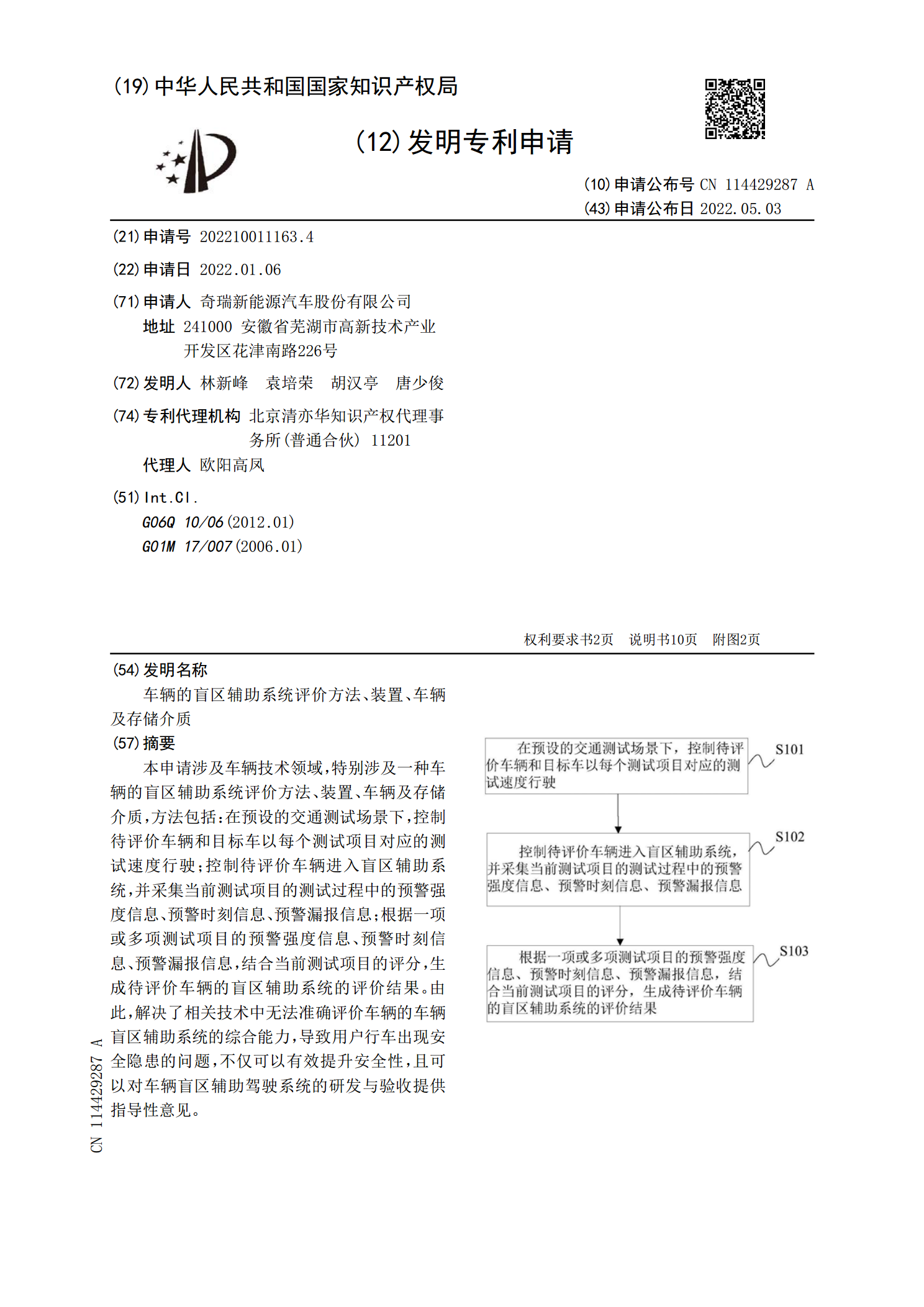
能减少乘客的缺电不安的车辆控制系统、车辆控制方法及存储介质。车辆控制系统具备:发电部,包括输出供电动机使用的动力的内燃机(110)和使用输出的动力来发电的所述电动机(112);蓄电池(150),储存发电的电力或由充电点供给的电力;行驶用电动机(118),与车辆的驱动轮连结,通过使用从所述蓄电池供给的电力进行驱动来使所述驱动轮旋转;利用状况取得部,取得在根据所述车辆从出发地到目的地的路径而确定的区域中存在的充电点的利用状况;控制部(160、190),基于所述充电点的利用状况,在所述充电点无法利用的情况下,与

车辆控制系统、车辆控制方法及存储介质.pdf
一种能够提高利用者的便利性的车辆控制系统、车辆控制方法及存储介质。车辆控制系统具备:第一识别部,其识别车辆的周边状况;驾驶控制部,其基于由所述第一识别部识别到的周边状况,不依赖于乘客的操作地控制所述车辆的转向及加减速;第二识别部,其识别放置于所述车辆的车室内的物体;以及取得部,其取得移动指示,所述移动指示是基于未乘坐所述车辆的利用者的行动而输出的移动指示,且通过所述驾驶控制部的控制而使所述车辆向驻车场移动,在由所述取得部取得所述移动指示且由所述第二识别部识别到放置于所述车室内的所述物体的情况下,所述驾驶控
车辆控制系统、车辆控制方法及存储介质.pdf
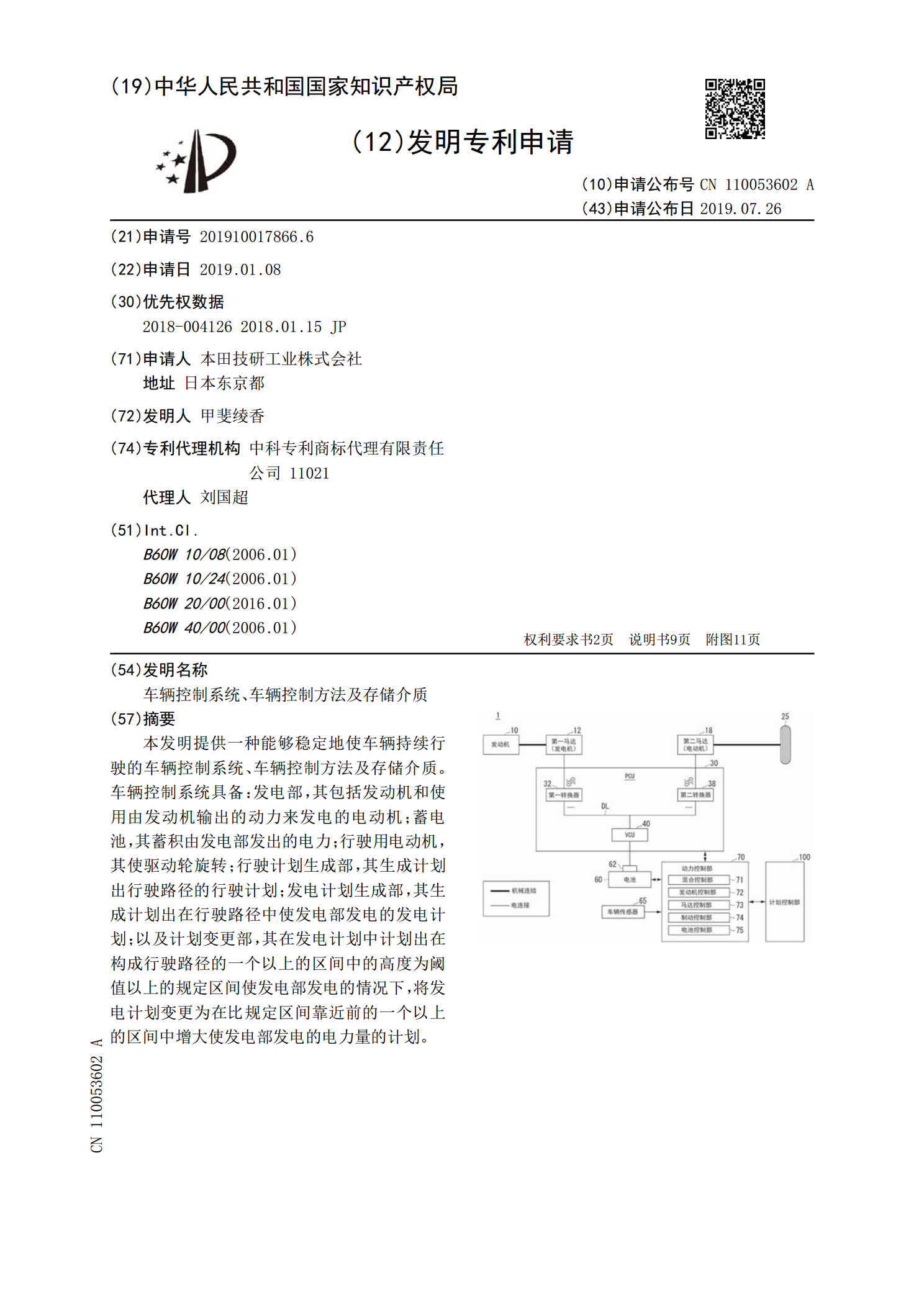
本发明提供一种能够稳定地使车辆持续行驶的车辆控制系统、车辆控制方法及存储介质。车辆控制系统具备:发电部,其包括发动机和使用由发动机输出的动力来发电的电动机;蓄电池,其蓄积由发电部发出的电力;行驶用电动机,其使驱动轮旋转;行驶计划生成部,其生成计划出行驶路径的行驶计划;发电计划生成部,其生成计划出在行驶路径中使发电部发电的发电计划;以及计划变更部,其在发电计划中计划出在构成行驶路径的一个以上的区间中的高度为阈值以上的规定区间使发电部发电的情况下,将发电计划变更为在比规定区间靠近前的一个以上的区间中增大使发电