
一种用于三维真彩环境建模的无人机吊舱.pdf

音景****ka

1/9
2/9

3/9
4/9
5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于三维真彩环境建模的无人机吊舱.pdf
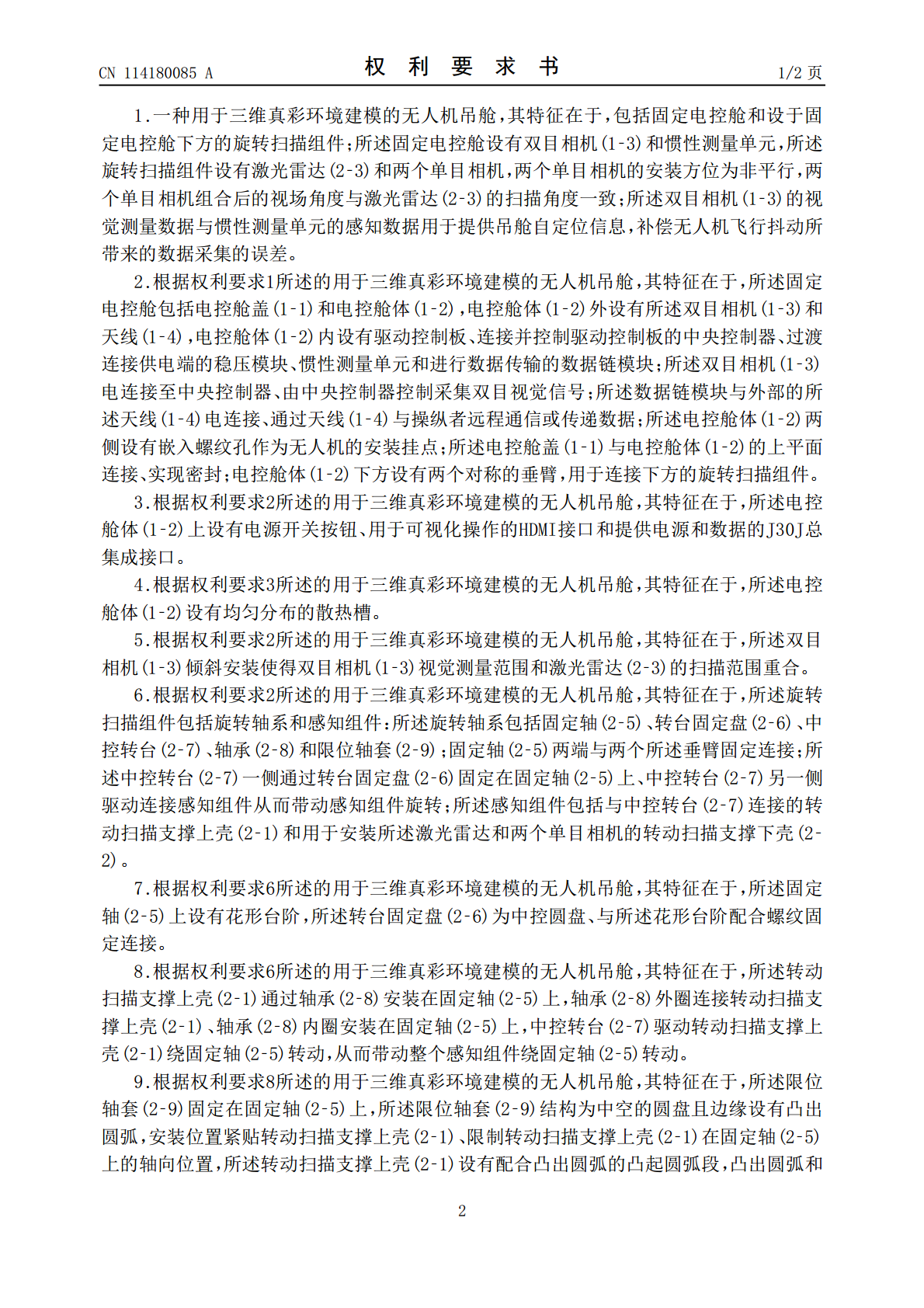
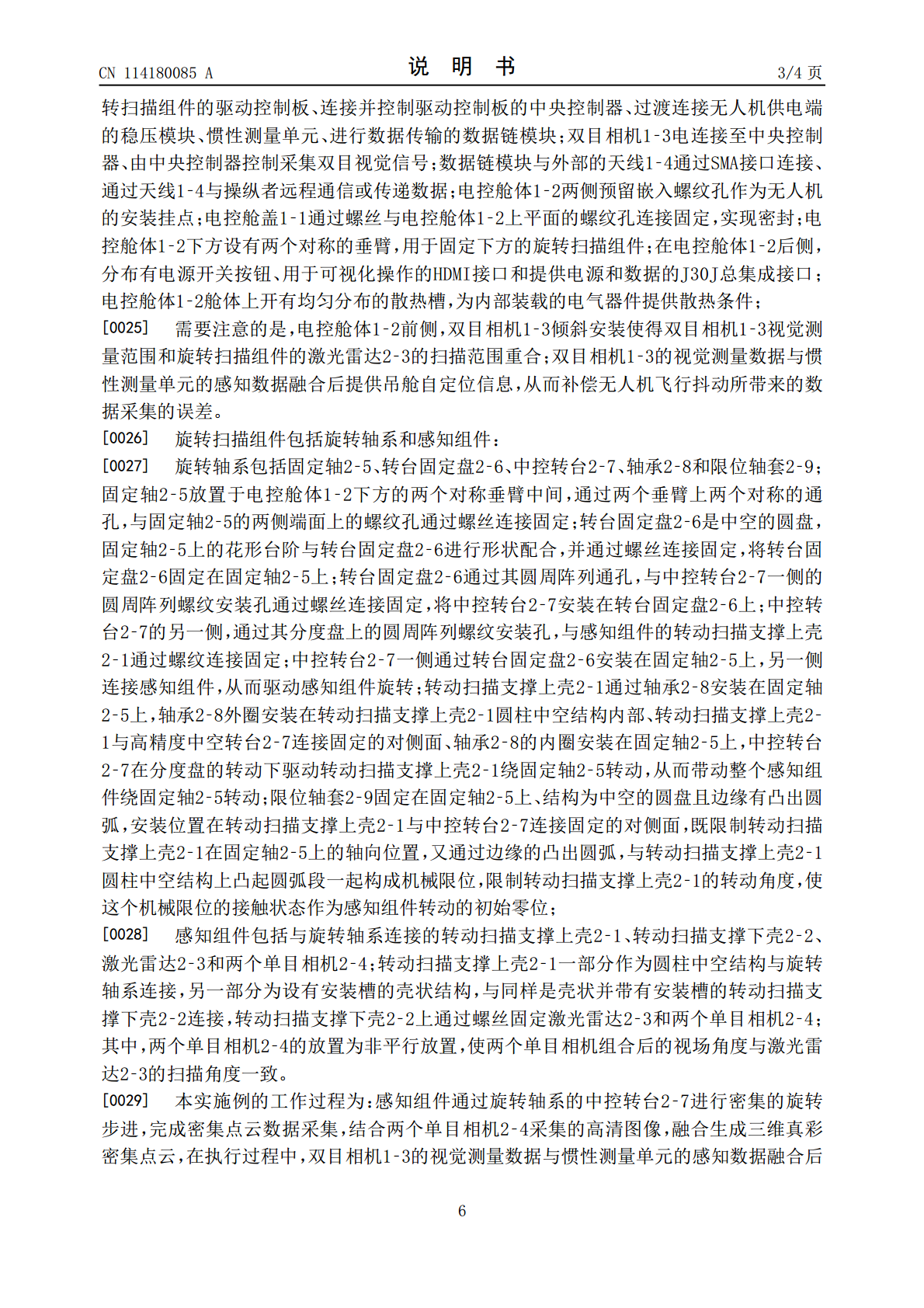
本申请公开了一种用于三维真彩环境建模的无人机吊舱,其特征在于,包括固定电控舱和设于固定电控舱下方的旋转扫描组件;所述固定电控舱设有双目相机和惯性测量单元,所述旋转扫描组件设有激光雷达和两个单目相机,两个单目相机的安装方位为非平行,两个单目相机组合后的视场角度与激光雷达的扫描角度一致;所述双目相机的视觉测量数据与惯性测量单元的感知数据用于提供吊舱自定位信息,补偿无人机飞行抖动所带来的数据采集的误差。采用多源融合方式,补偿采集数据的误差。能为三维真彩建模功能提供一个优质软硬件平台,补充了现有产品中缺乏三维真彩
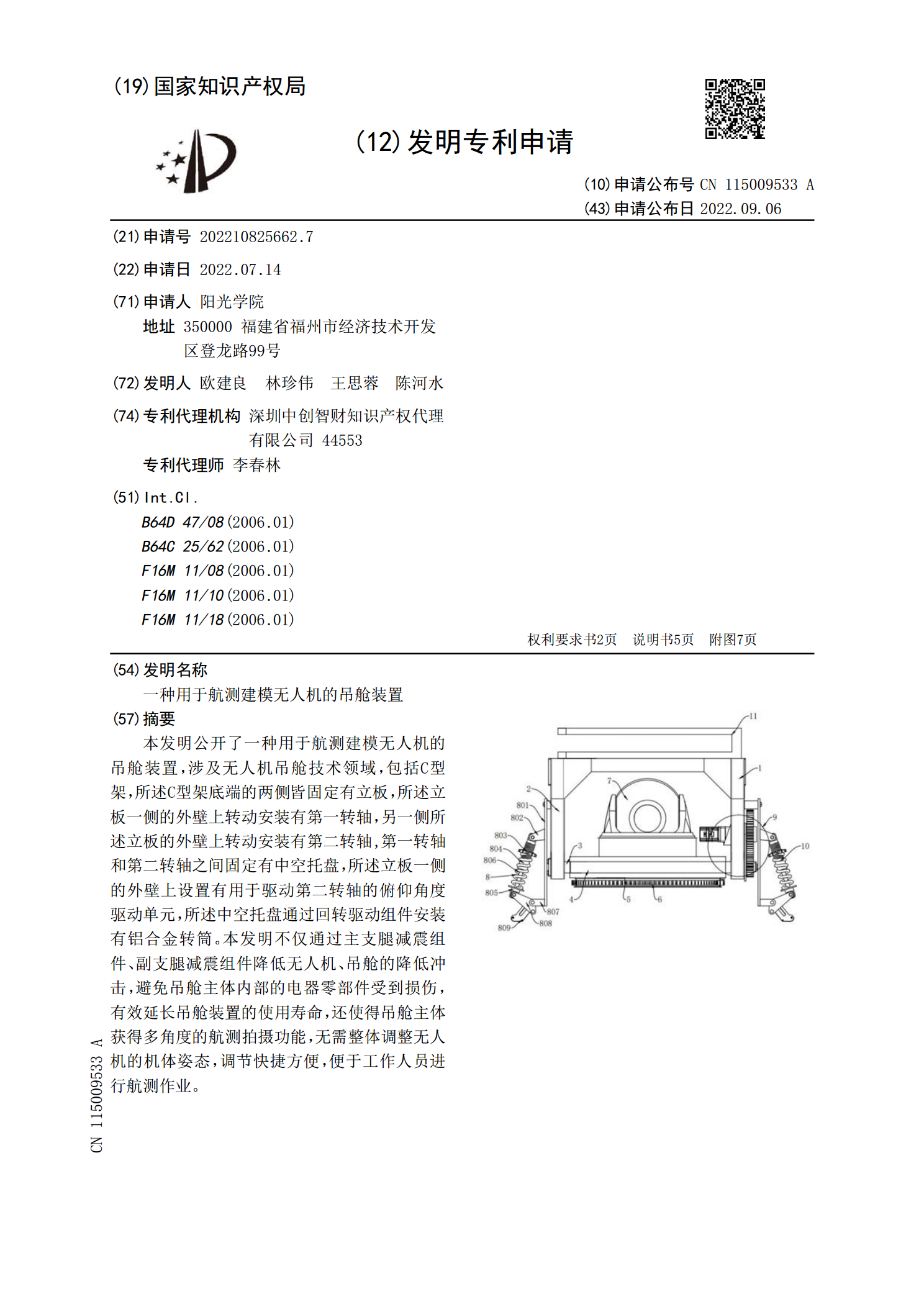
一种用于航测建模无人机的吊舱装置.pdf
本发明公开了一种用于航测建模无人机的吊舱装置,涉及无人机吊舱技术领域,包括C型架,所述C型架底端的两侧皆固定有立板,所述立板一侧的外壁上转动安装有第一转轴,另一侧所述立板的外壁上转动安装有第二转轴,第一转轴和第二转轴之间固定有中空托盘,所述立板一侧的外壁上设置有用于驱动第二转轴的俯仰角度驱动单元,所述中空托盘通过回转驱动组件安装有铝合金转筒。本发明不仅通过主支腿减震组件、副支腿减震组件降低无人机、吊舱的降低冲击,避免吊舱主体内部的电器零部件受到损伤,有效延长吊舱装置的使用寿命,还使得吊舱主体获得多角度的航
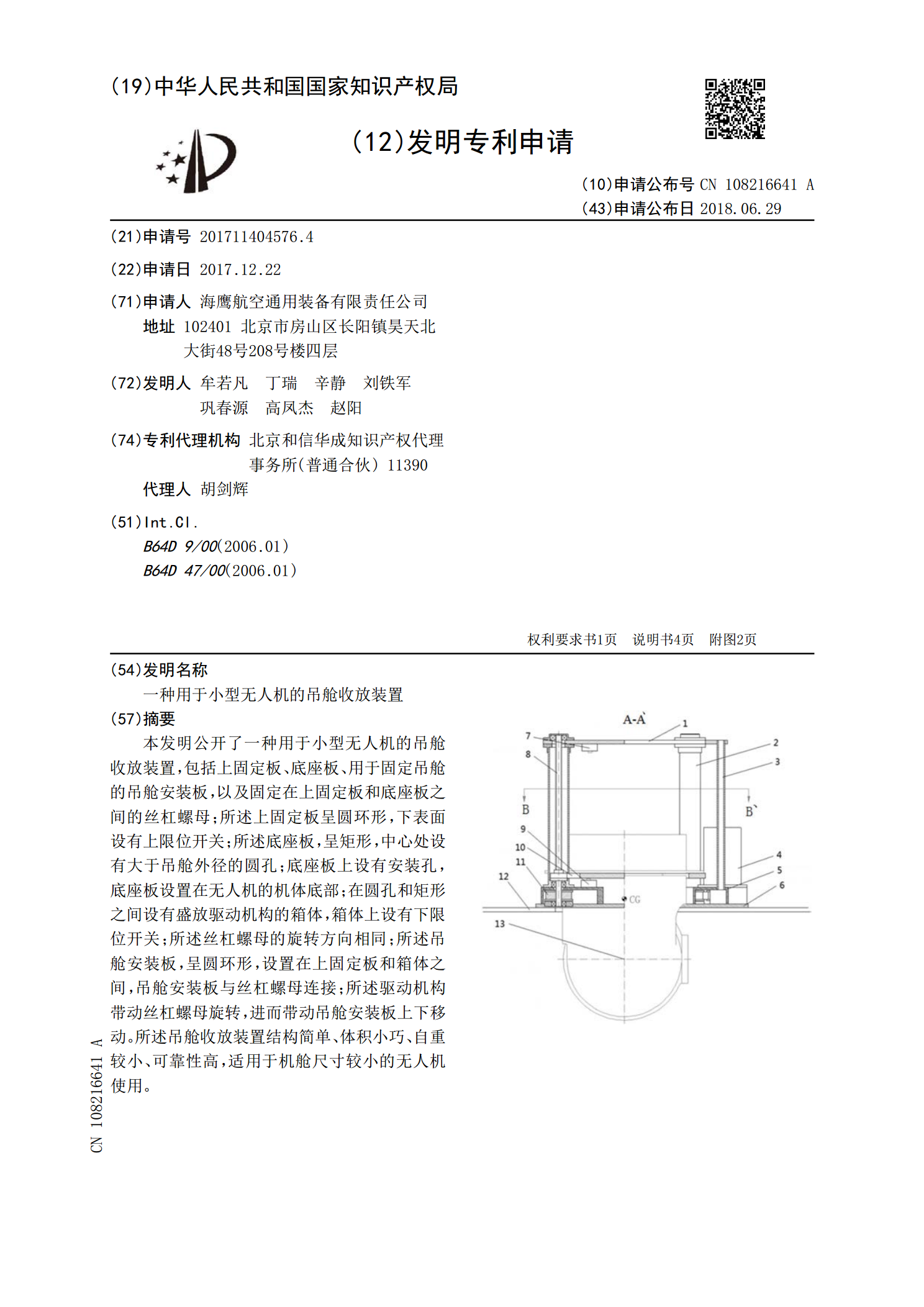
一种用于小型无人机的吊舱收放装置.pdf
本发明公开了一种用于小型无人机的吊舱收放装置,包括上固定板、底座板、用于固定吊舱的吊舱安装板,以及固定在上固定板和底座板之间的丝杠螺母;所述上固定板呈圆环形,下表面设有上限位开关;所述底座板,呈矩形,中心处设有大于吊舱外径的圆孔;底座板上设有安装孔,底座板设置在无人机的机体底部;在圆孔和矩形之间设有盛放驱动机构的箱体,箱体上设有下限位开关;所述丝杠螺母的旋转方向相同;所述吊舱安装板,呈圆环形,设置在上固定板和箱体之间,吊舱安装板与丝杠螺母连接;所述驱动机构带动丝杠螺母旋转,进而带动吊舱安装板上下移动。所述
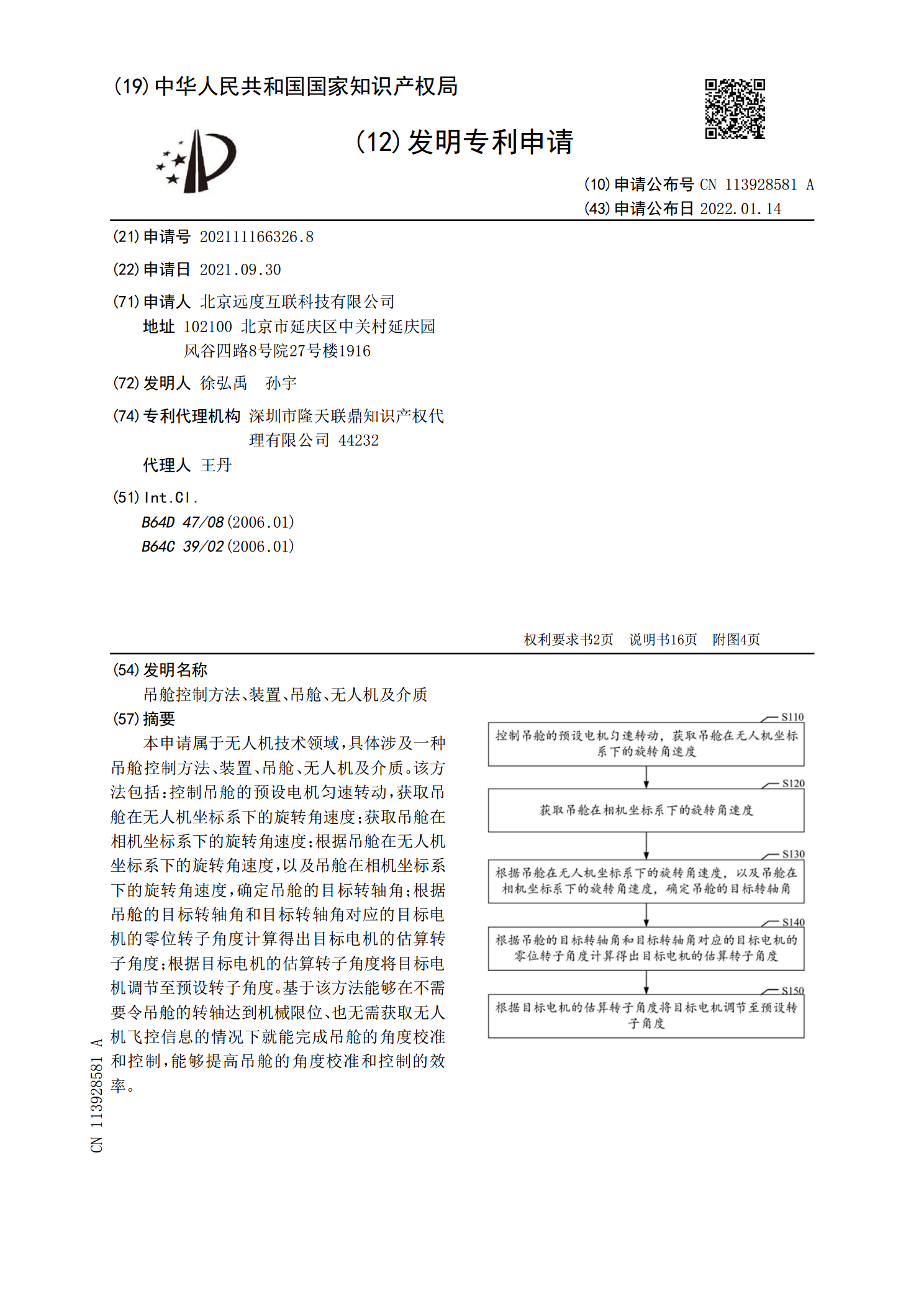
吊舱控制方法、装置、吊舱、无人机及介质.pdf
本申请属于无人机技术领域,具体涉及一种吊舱控制方法、装置、吊舱、无人机及介质。该方法包括:控制吊舱的预设电机匀速转动,获取吊舱在无人机坐标系下的旋转角速度;获取吊舱在相机坐标系下的旋转角速度;根据吊舱在无人机坐标系下的旋转角速度,以及吊舱在相机坐标系下的旋转角速度,确定吊舱的目标转轴角;根据吊舱的目标转轴角和目标转轴角对应的目标电机的零位转子角度计算得出目标电机的估算转子角度;根据目标电机的估算转子角度将目标电机调节至预设转子角度。基于该方法能够在不需要令吊舱的转轴达到机械限位、也无需获取无人机飞控信息的
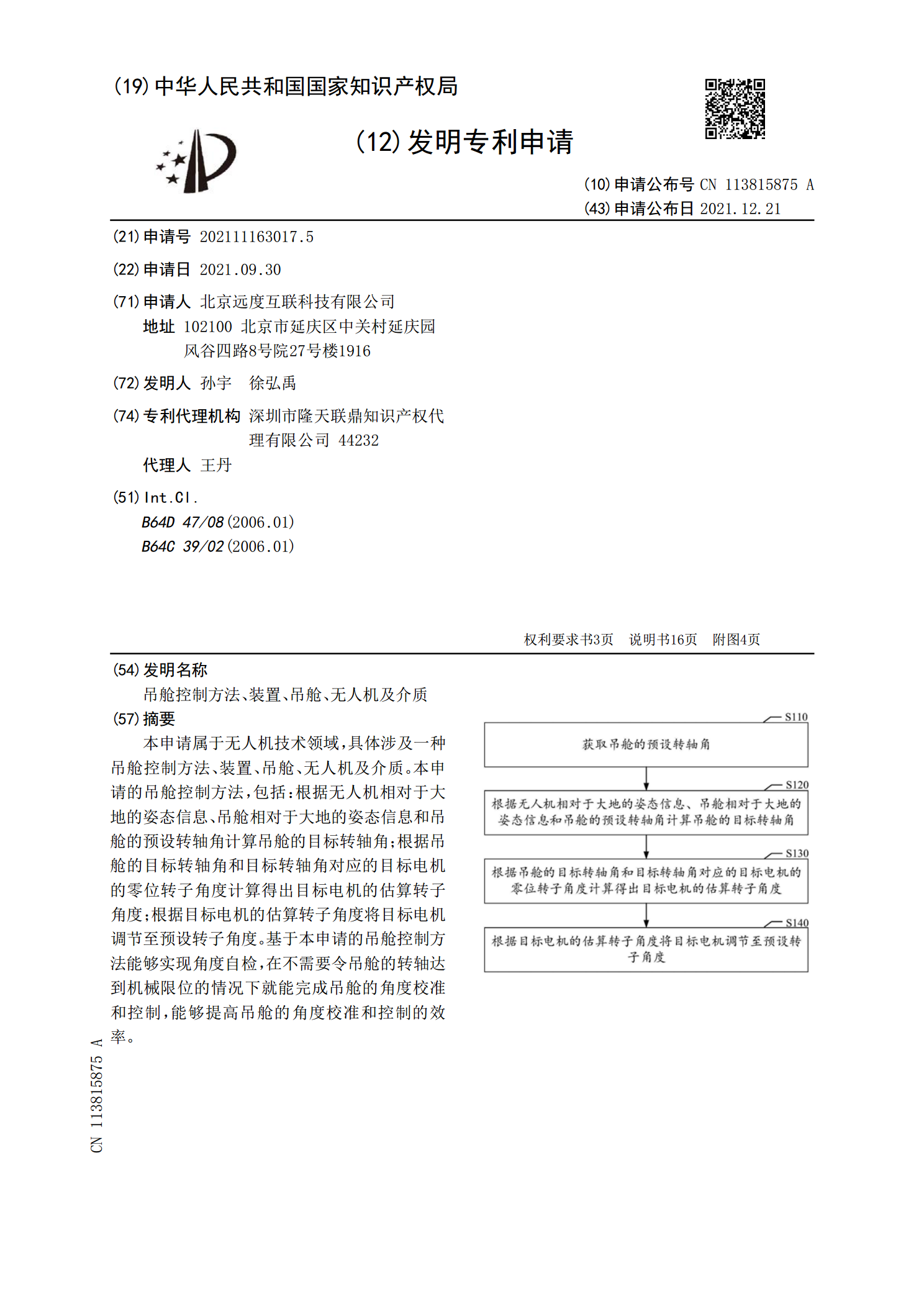
吊舱控制方法、装置、吊舱、无人机及介质.pdf
本申请属于无人机技术领域,具体涉及一种吊舱控制方法、装置、吊舱、无人机及介质。本申请的吊舱控制方法,包括:根据无人机相对于大地的姿态信息、吊舱相对于大地的姿态信息和吊舱的预设转轴角计算吊舱的目标转轴角;根据吊舱的目标转轴角和目标转轴角对应的目标电机的零位转子角度计算得出目标电机的估算转子角度;根据目标电机的估算转子角度将目标电机调节至预设转子角度。基于本申请的吊舱控制方法能够实现角度自检,在不需要令吊舱的转轴达到机械限位的情况下就能完成吊舱的角度校准和控制,能够提高吊舱的角度校准和控制的效率。