
车辆控制方法、装置、车辆和存储介质.pdf

努力****晓骞

1/10
2/10

3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆控制方法、装置、存储介质和车辆.pdf
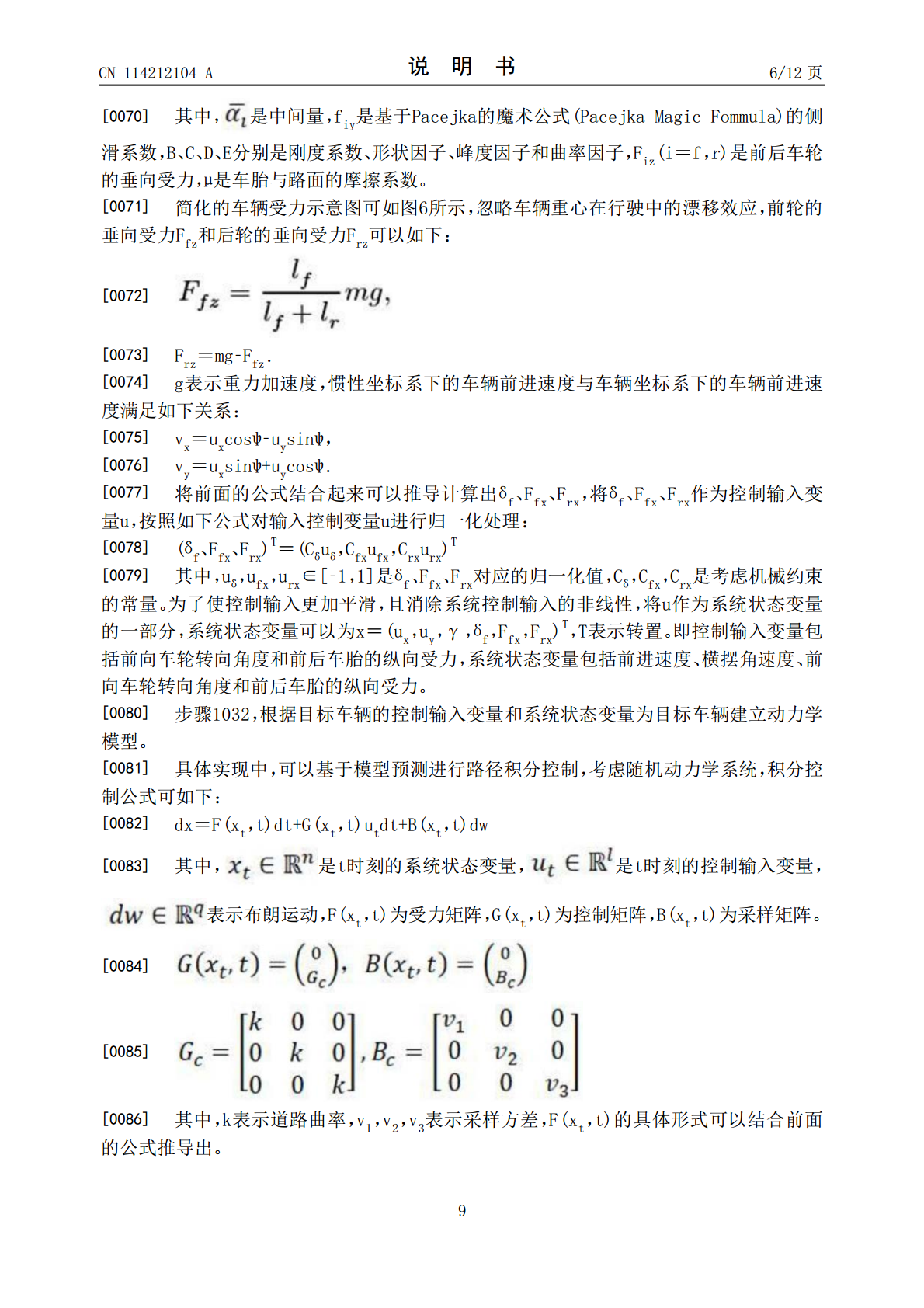
本申请提供一种车辆控制方法、装置、存储介质和车辆。该方法包括:获取目标车辆对应的当前雨量值和当前积水面积;根据预先设置的雨量值、积水面积和地面附着系数的对应关系,确定当前雨量值和当前积水面积对应的目标地面附着系数值;根据目标地面附着系数值以及目标车辆的当前车速、当前纵向加速度和当前横向加速度,并结合预先设置的车身姿态判断规则和侧滑概率计算规则,确定目标车辆的目标车身姿态和目标侧滑概率;输出与目标车身姿态和目标侧滑概率相对应的目标车辆的车辆控制信息。本申请能够提高下雨天车辆行驶的安全性。

车辆的控制方法、装置、车辆和存储介质.pdf
本发明提供了一种车辆的控制方法、装置、车辆和存储介质,车辆的控制方法包括;接收多个第一信息获取装置获取到的驾驶盲区的图像信息;对多个第一信息获取装置获取到的图像信息进行图像拼接,以得到拼接后的图像信息;获取车辆的行驶状态,根据车辆的行驶状态控制输出装置输出拼接后的图像信息或至少一个第一信息获取装置获取到的图像信息。驾驶人员在驾驶过程,查看输出装置输出的信息与当前行驶状态相关,即可以查看拼接后的图像信息或至少一个第一信息获取装置获取到的图像信息,以便驾驶人员观察视觉盲区,降低出现交通事故的风险。
车辆控制方法、装置、车辆和存储介质.pdf
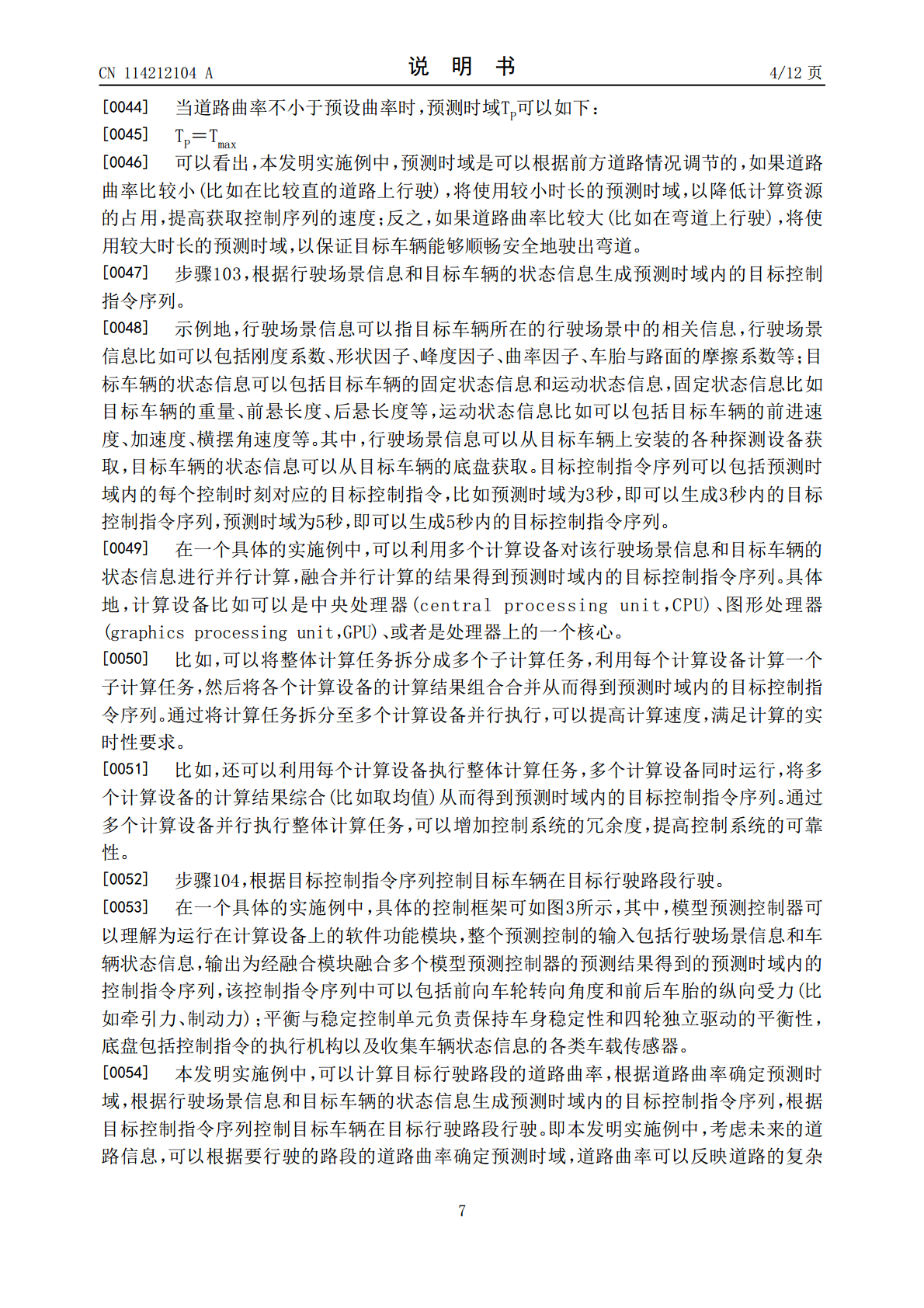
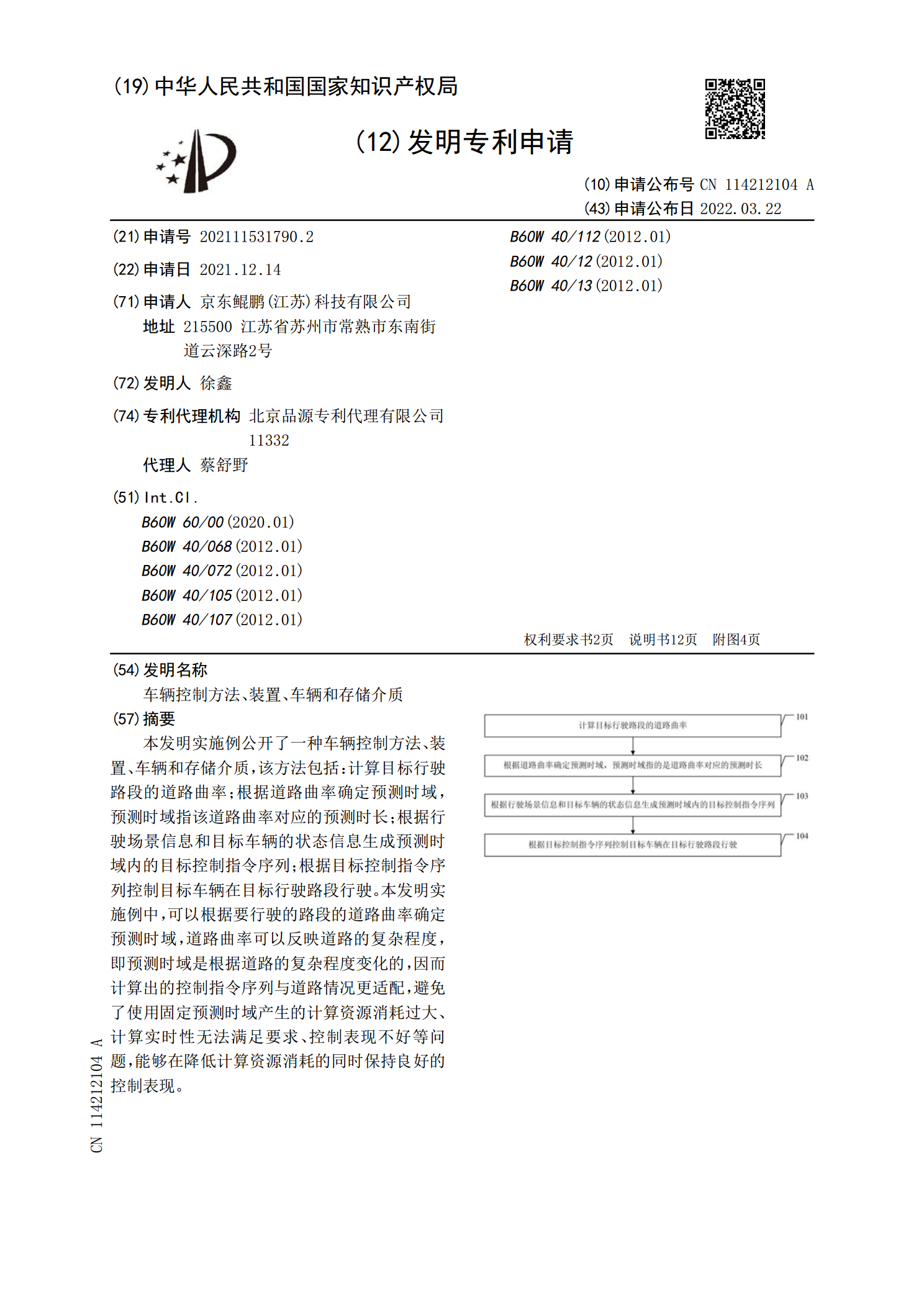
本发明实施例公开了一种车辆控制方法、装置、车辆和存储介质,该方法包括:计算目标行驶路段的道路曲率;根据道路曲率确定预测时域,预测时域指该道路曲率对应的预测时长;根据行驶场景信息和目标车辆的状态信息生成预测时域内的目标控制指令序列;根据目标控制指令序列控制目标车辆在目标行驶路段行驶。本发明实施例中,可以根据要行驶的路段的道路曲率确定预测时域,道路曲率可以反映道路的复杂程度,即预测时域是根据道路的复杂程度变化的,因而计算出的控制指令序列与道路情况更适配,避免了使用固定预测时域产生的计算资源消耗过大、计算实时性
车辆的控制装置、车辆的控制方法和存储介质.pdf
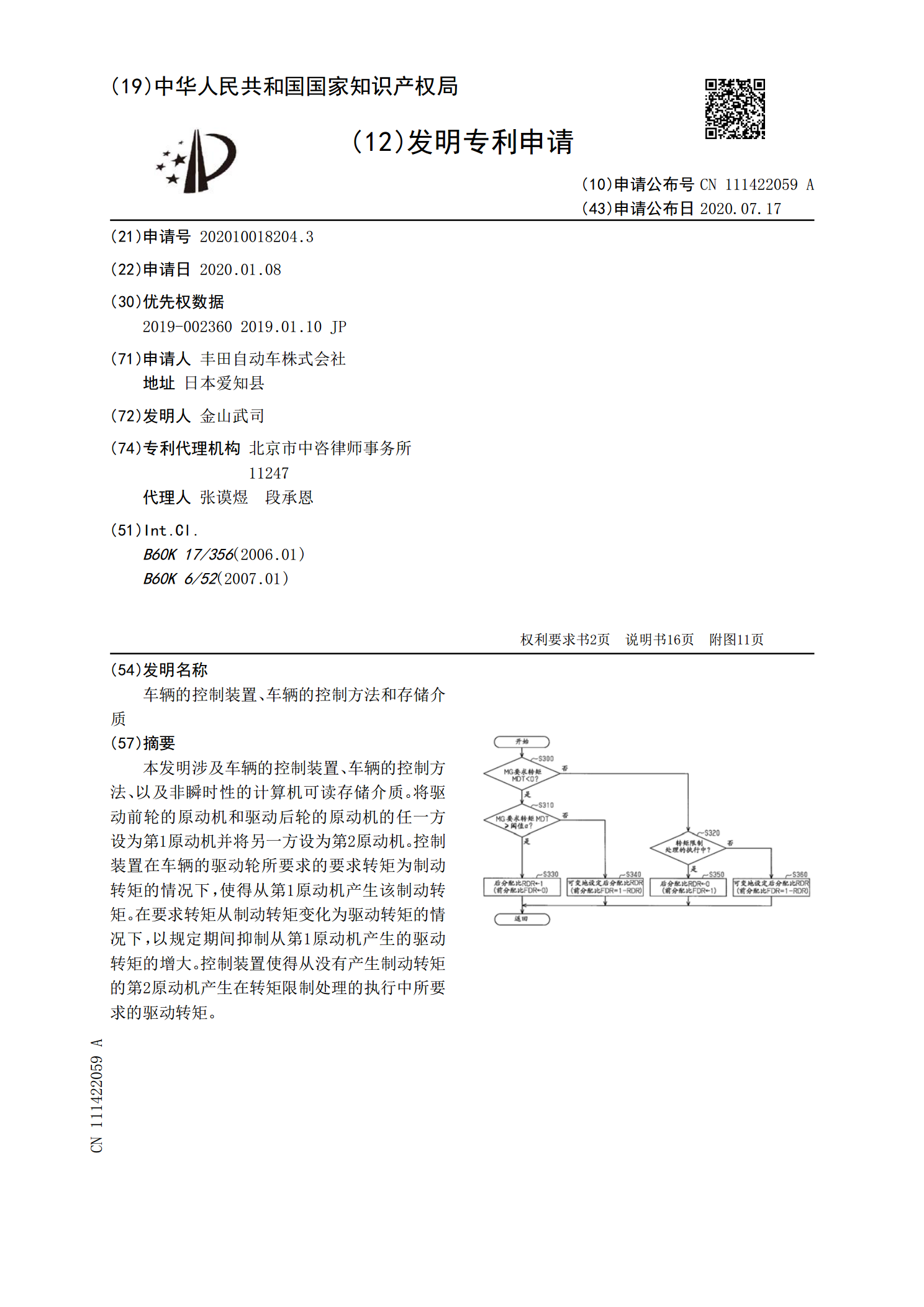
本发明涉及车辆的控制装置、车辆的控制方法、以及非瞬时性的计算机可读存储介质。将驱动前轮的原动机和驱动后轮的原动机的任一方设为第1原动机并将另一方设为第2原动机。控制装置在车辆的驱动轮所要求的要求转矩为制动转矩的情况下,使得从第1原动机产生该制动转矩。在要求转矩从制动转矩变化为驱动转矩的情况下,以规定期间抑制从第1原动机产生的驱动转矩的增大。控制装置使得从没有产生制动转矩的第2原动机产生在转矩限制处理的执行中所要求的驱动转矩。
车辆制动控制方法和装置、存储介质、车辆.pdf
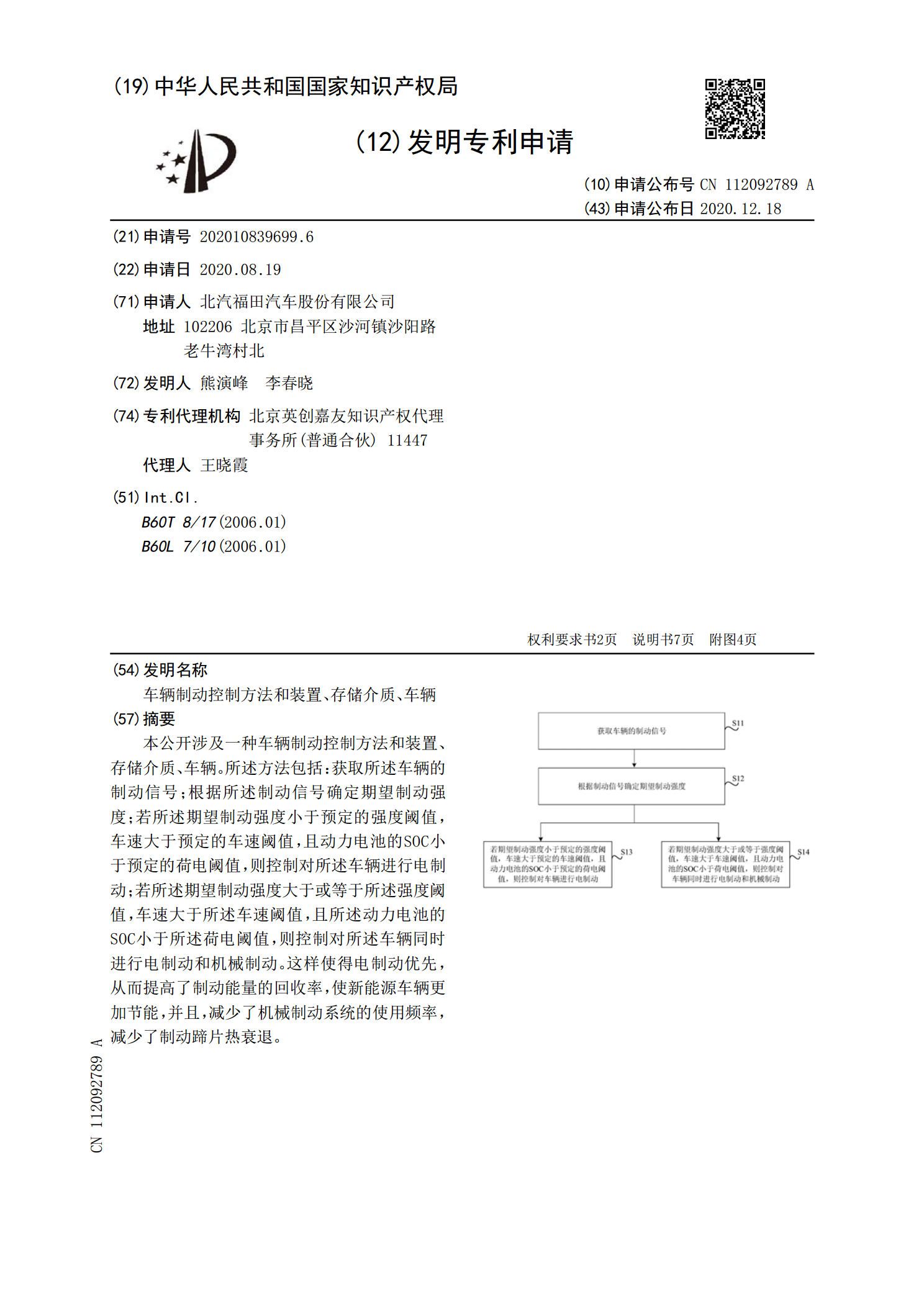
本公开涉及一种车辆制动控制方法和装置、存储介质、车辆。所述方法包括:获取所述车辆的制动信号;根据所述制动信号确定期望制动强度;若所述期望制动强度小于预定的强度阈值,车速大于预定的车速阈值,且动力电池的SOC小于预定的荷电阈值,则控制对所述车辆进行电制动;若所述期望制动强度大于或等于所述强度阈值,车速大于所述车速阈值,且所述动力电池的SOC小于所述荷电阈值,则控制对所述车辆同时进行电制动和机械制动。这样使得电制动优先,从而提高了制动能量的回收率,使新能源车辆更加节能,并且,减少了机械制动系统的使用频率,减少