
基于机载雷达主被动监视的航迹融合方法.pdf

高格****gu

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于机载雷达主被动监视的航迹融合方法.pdf
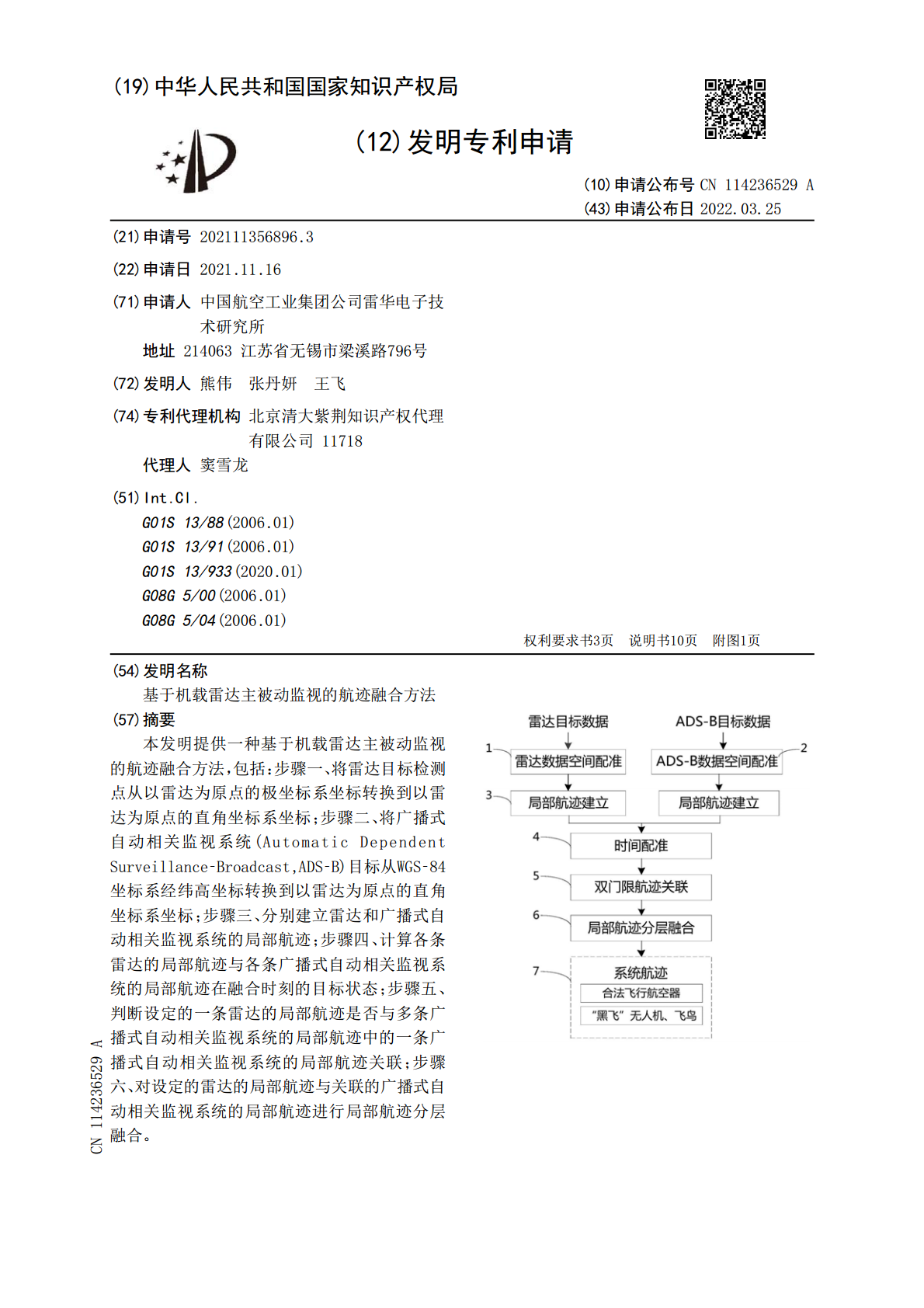
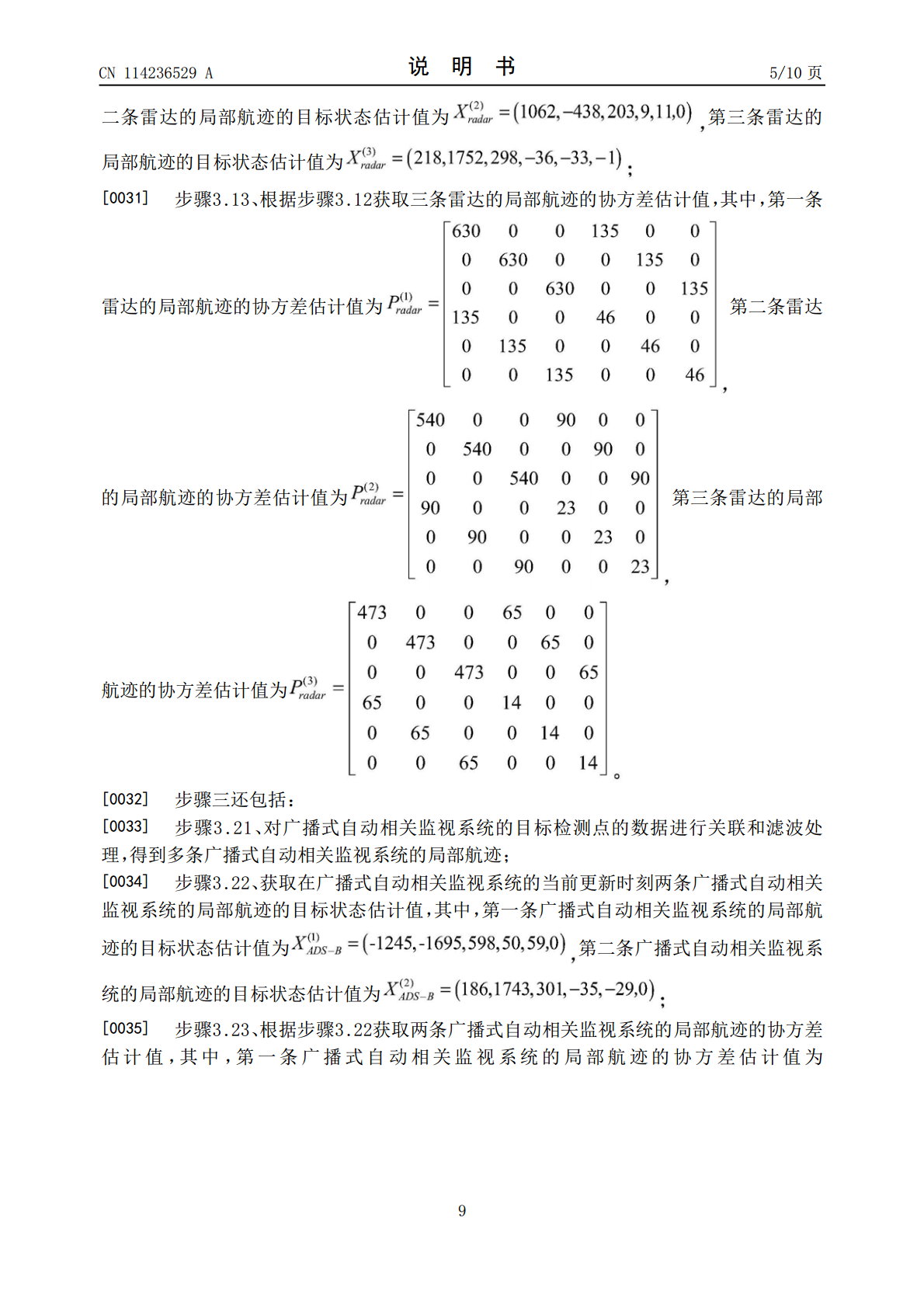
本发明提供一种基于机载雷达主被动监视的航迹融合方法,包括:步骤一、将雷达目标检测点从以雷达为原点的极坐标系坐标转换到以雷达为原点的直角坐标系坐标;步骤二、将广播式自动相关监视系统(AutomaticDependentSurveillance‑Broadcast,ADS‑B)目标从WGS‑84坐标系经纬高坐标转换到以雷达为原点的直角坐标系坐标;步骤三、分别建立雷达和广播式自动相关监视系统的局部航迹;步骤四、计算各条雷达的局部航迹与各条广播式自动相关监视系统的局部航迹在融合时刻的目标状态;步骤五、判断设定

一种机载相控阵雷达航迹关联方法.pdf
本发明公开了一种机载相控阵雷达航迹关联方法,属于雷达航迹跟踪技术领域,包括以下步骤:S1:关联步骤划分;S2:径向速度门限判断;S3:门限交叉判断;S4:航迹续接。本发明通过提高航迹关联的可靠性和实时性,提升了机载相控阵雷达的航迹跟踪质量,尤其是在平台运动、跟踪目标数量多、环境杂波强的情况下;在多种坐标系下进行关联门限交叉判断,即利用目标运动特性进行门限判断,又避免了雷达量测方位与量测距离误差的耦合,同时不损失多普勒精度;当目标失跟时,对失跟航迹与新起始航迹进行航迹续接,既快速锁定失跟目标,又降低了短航迹
一种基于高精度地图的高速场景多雷达航迹融合方法.pdf
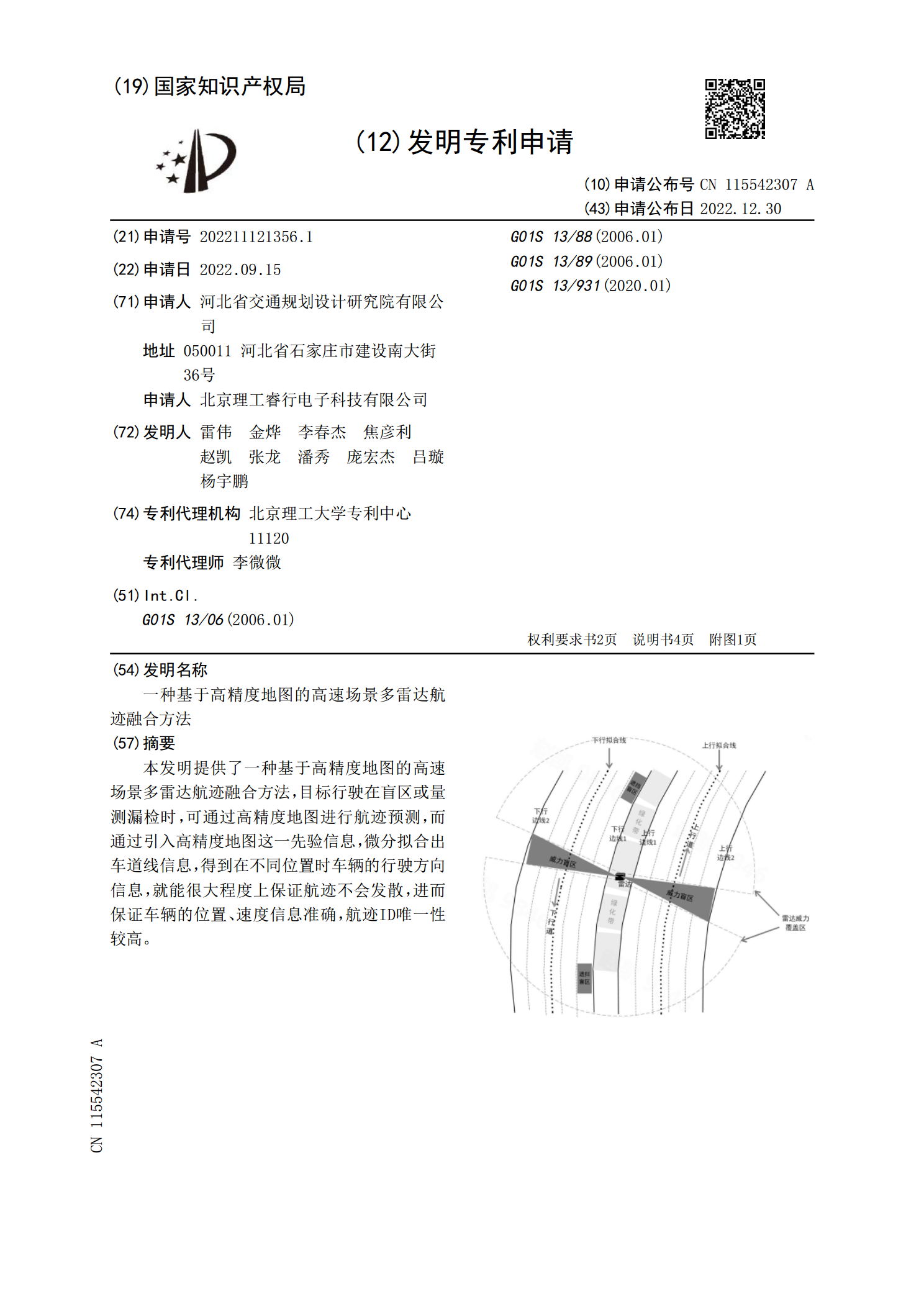
本发明提供了一种基于高精度地图的高速场景多雷达航迹融合方法,目标行驶在盲区或量测漏检时,可通过高精度地图进行航迹预测,而通过引入高精度地图这一先验信息,微分拟合出车道线信息,得到在不同位置时车辆的行驶方向信息,就能很大程度上保证航迹不会发散,进而保证车辆的位置、速度信息准确,航迹ID唯一性较高。
基于CLEAN算法的被动声呐目标检测与航迹回溯方法.pdf
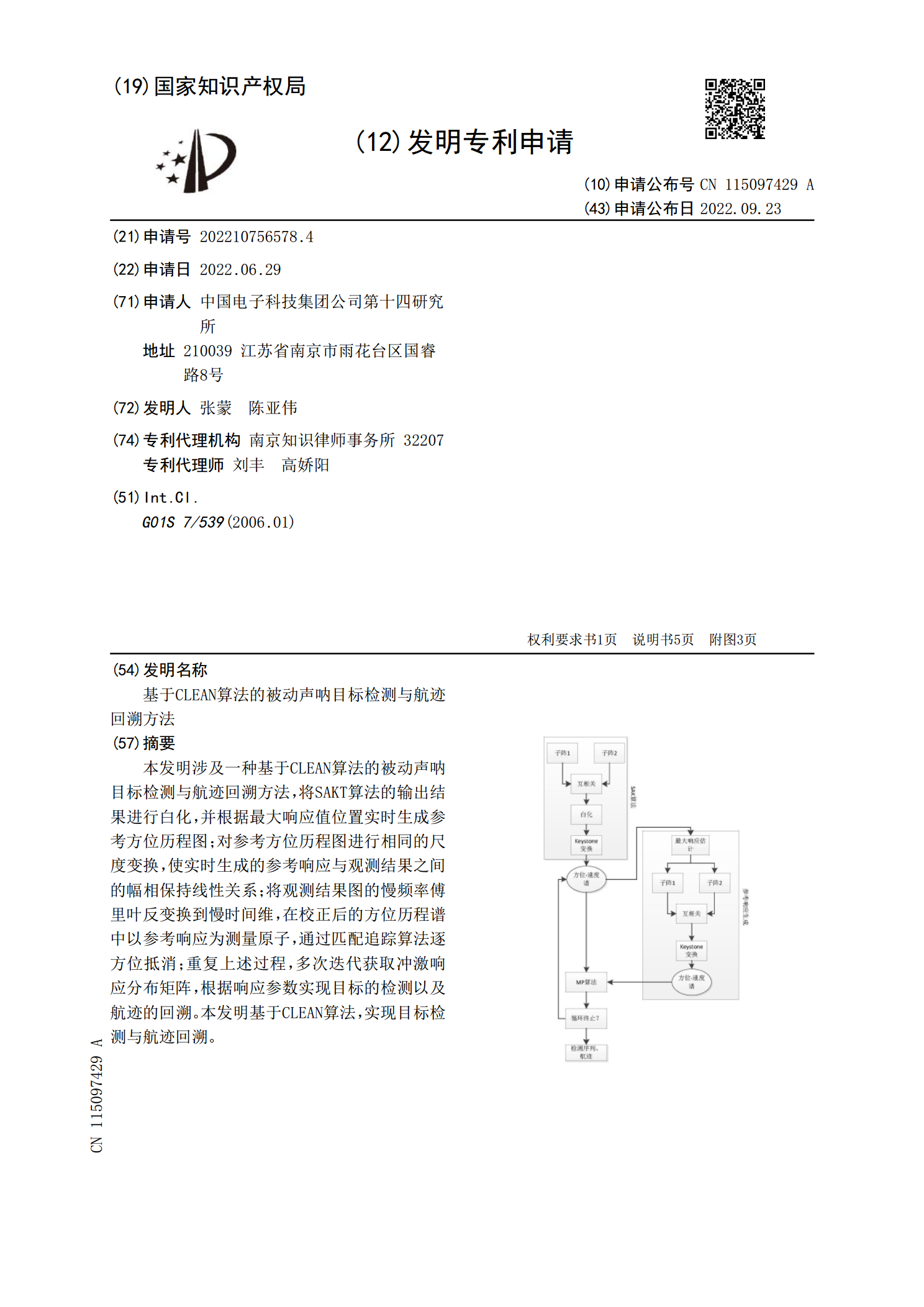
本发明涉及一种基于CLEAN算法的被动声呐目标检测与航迹回溯方法,将SAKT算法的输出结果进行白化,并根据最大响应值位置实时生成参考方位历程图;对参考方位历程图进行相同的尺度变换,使实时生成的参考响应与观测结果之间的幅相保持线性关系;将观测结果图的慢频率傅里叶反变换到慢时间维,在校正后的方位历程谱中以参考响应为测量原子,通过匹配追踪算法逐方位抵消;重复上述过程,多次迭代获取冲激响应分布矩阵,根据响应参数实现目标的检测以及航迹的回溯。本发明基于CLEAN算法,实现目标检测与航迹回溯。
一种基于点选航迹及航迹外推的雷达目标追赶跟踪方法.pdf
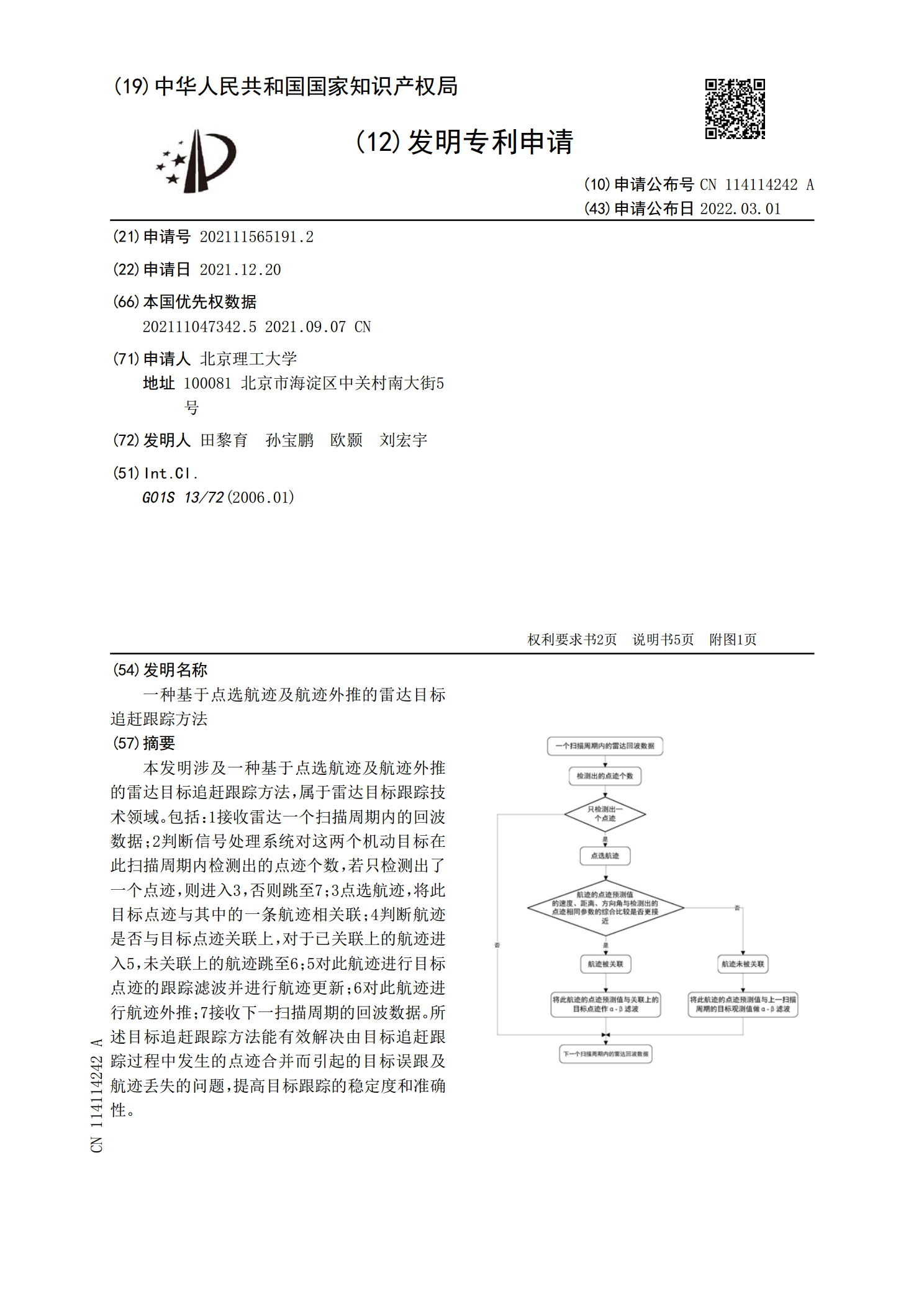
本发明涉及一种基于点选航迹及航迹外推的雷达目标追赶跟踪方法,属于雷达目标跟踪技术领域。包括:1接收雷达一个扫描周期内的回波数据;2判断信号处理系统对这两个机动目标在此扫描周期内检测出的点迹个数,若只检测出了一个点迹,则进入3,否则跳至7;3点选航迹,将此目标点迹与其中的一条航迹相关联;4判断航迹是否与目标点迹关联上,对于已关联上的航迹进入5,未关联上的航迹跳至6;5对此航迹进行目标点迹的跟踪滤波并进行航迹更新;6对此航迹进行航迹外推;7接收下一扫描周期的回波数据。所述目标追赶跟踪方法能有效解决由目标追赶跟