
基于CLEAN算法的被动声呐目标检测与航迹回溯方法.pdf

岚风****55

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于CLEAN算法的被动声呐目标检测与航迹回溯方法.pdf
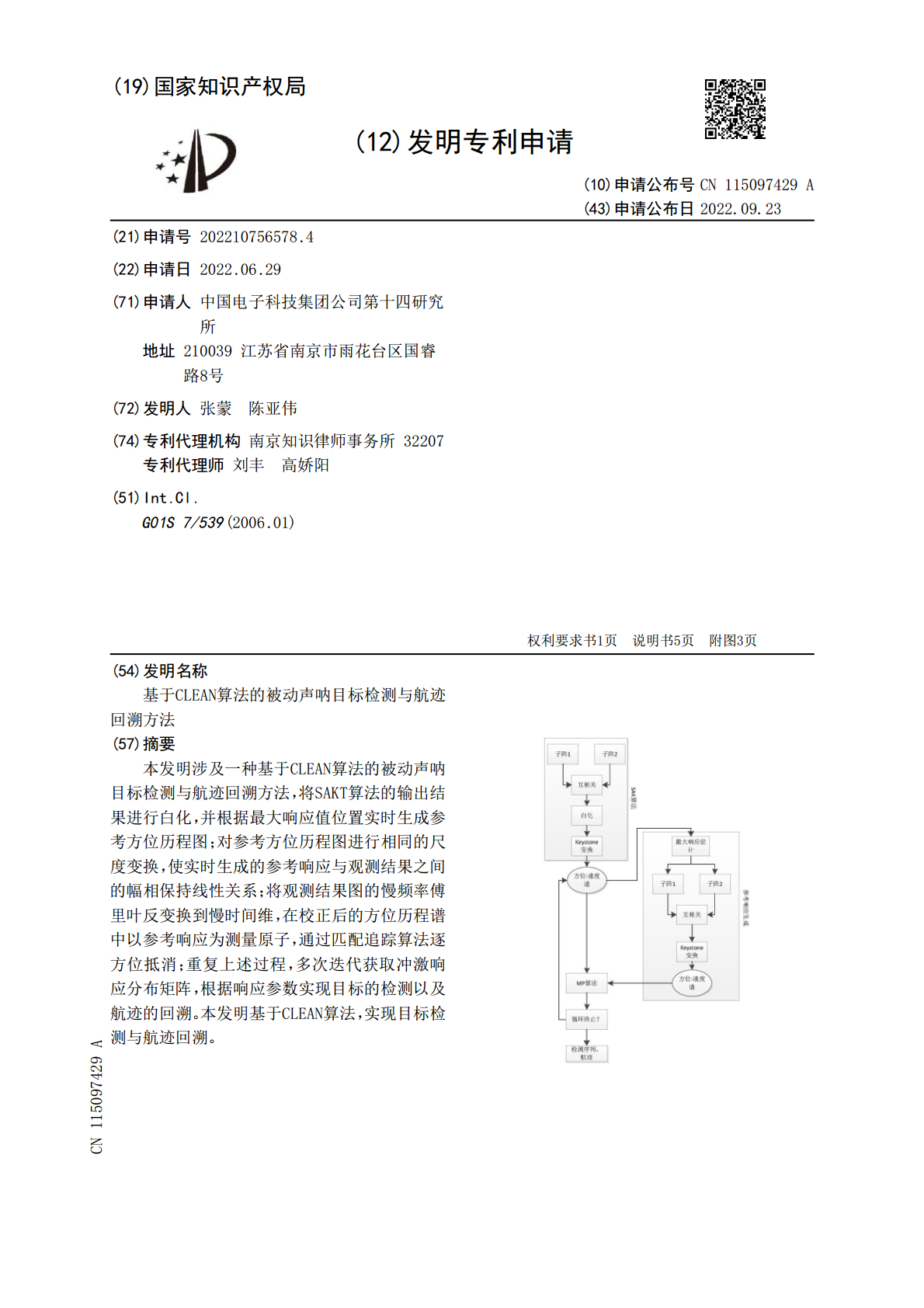
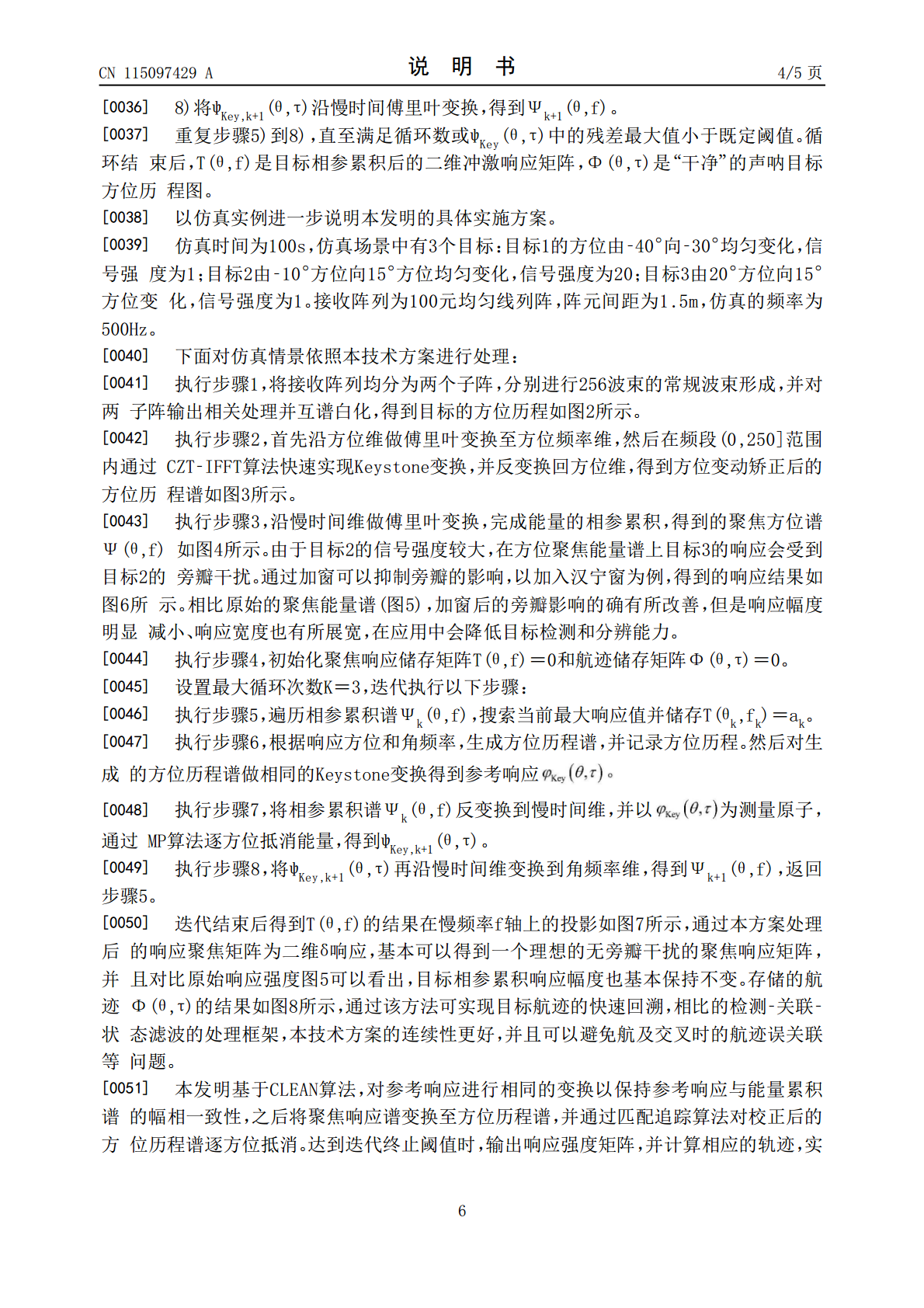
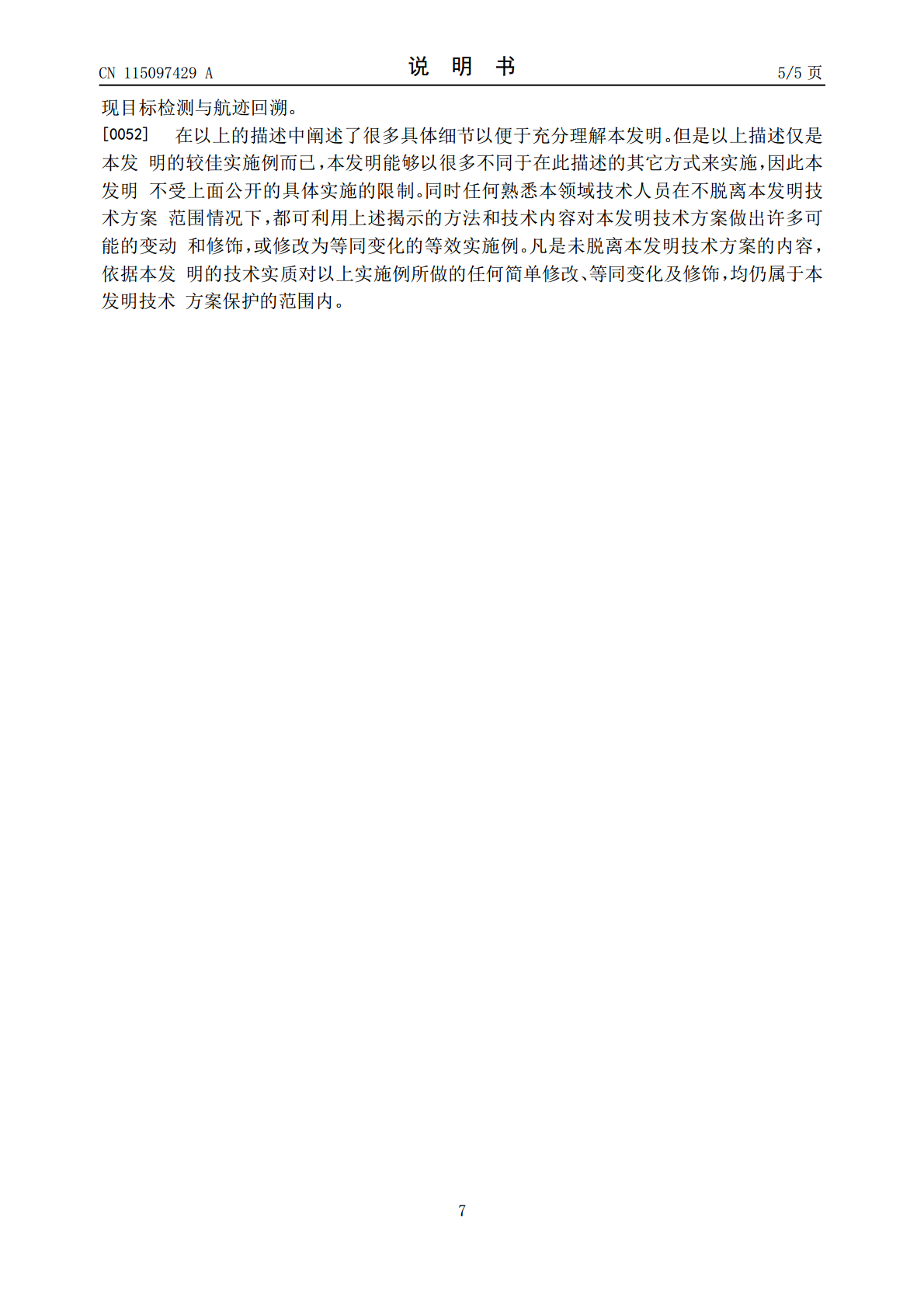
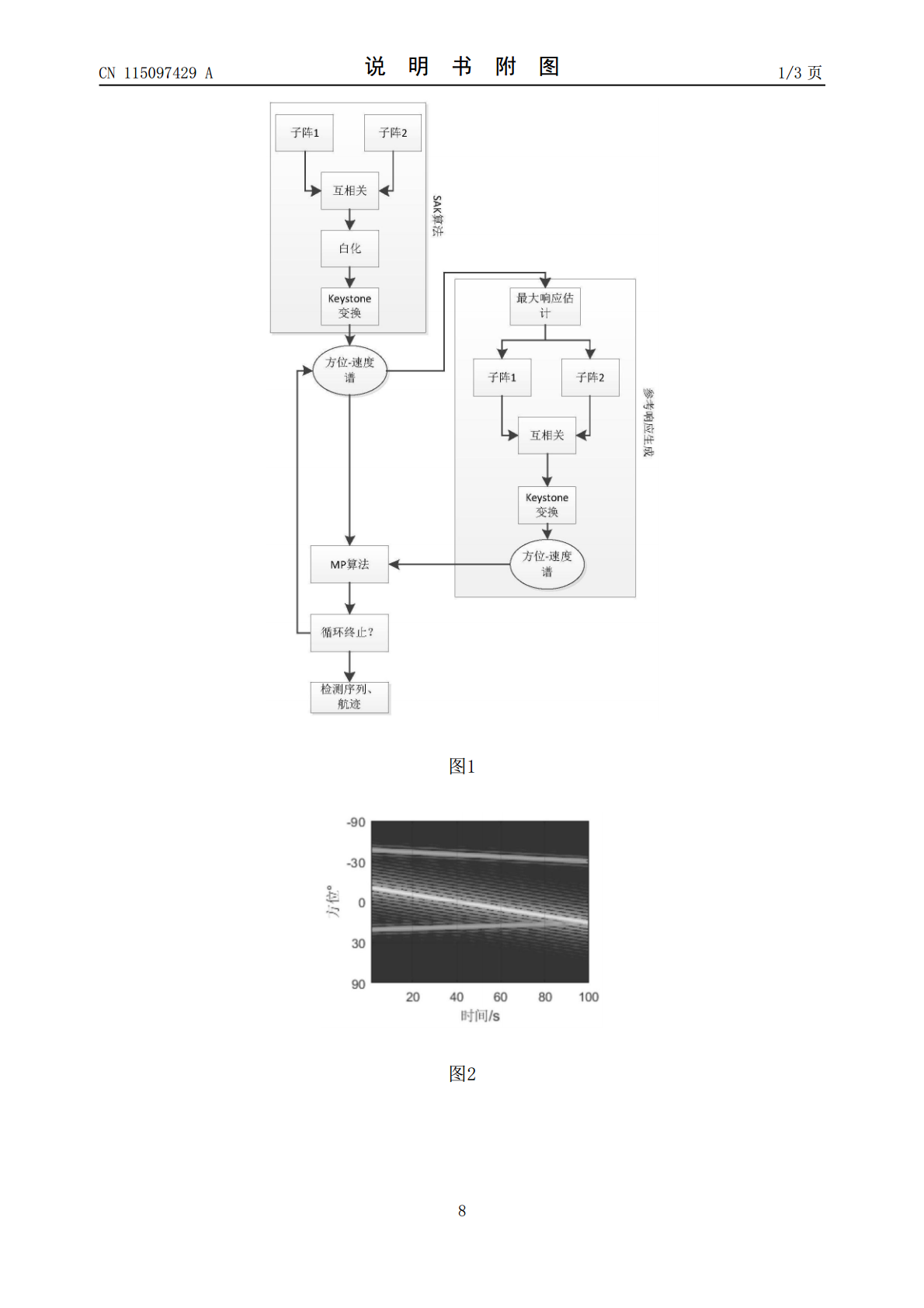
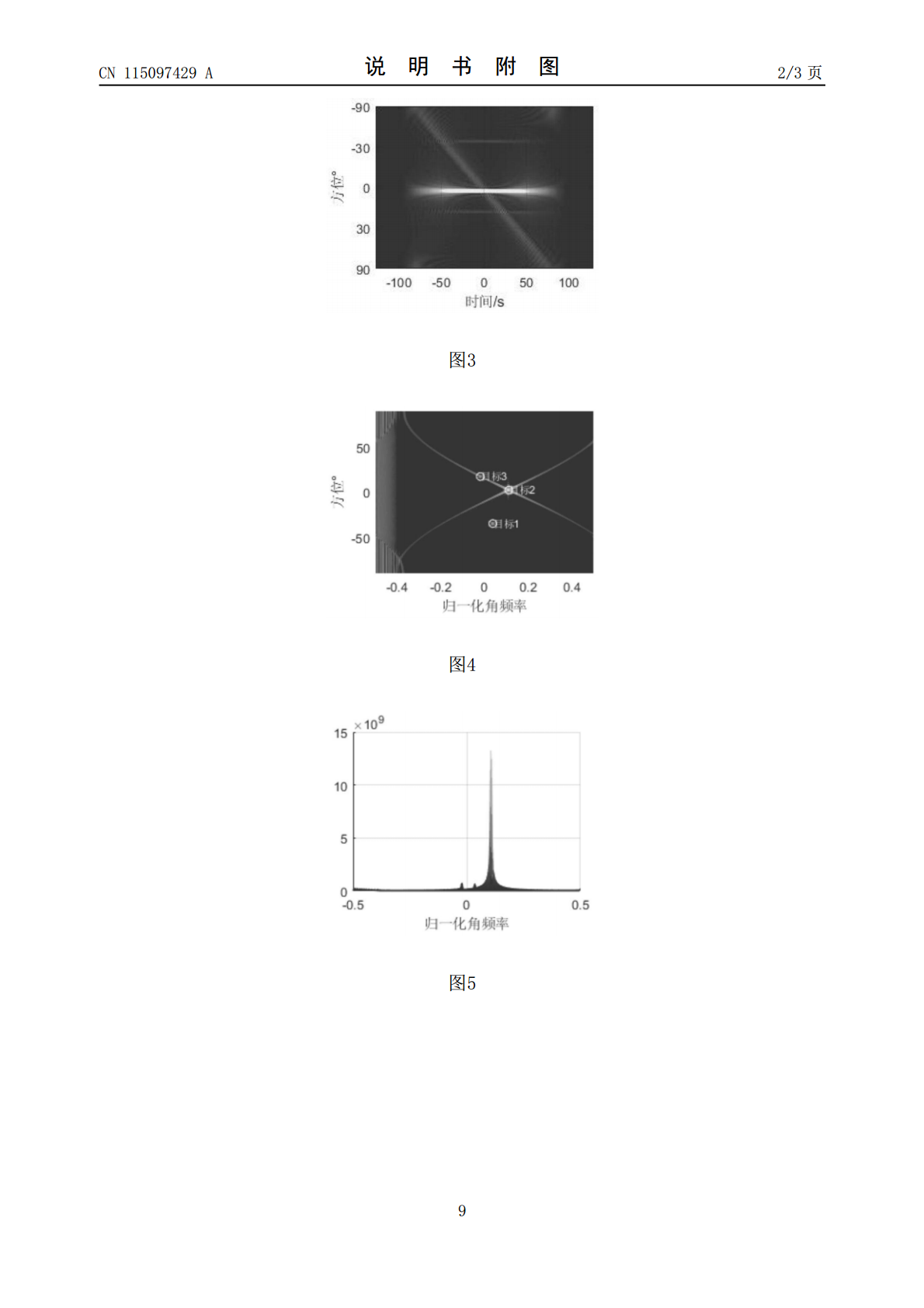
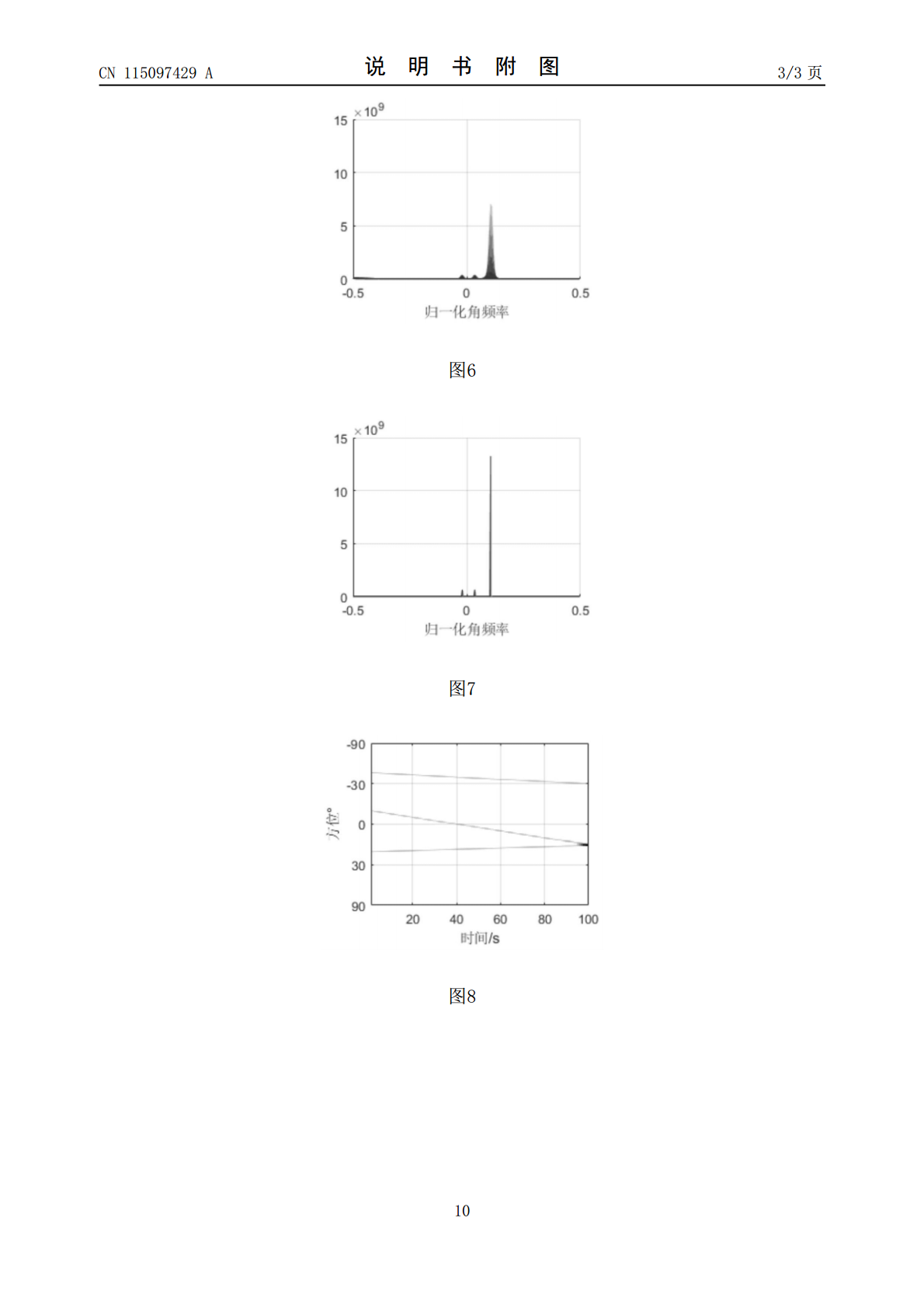
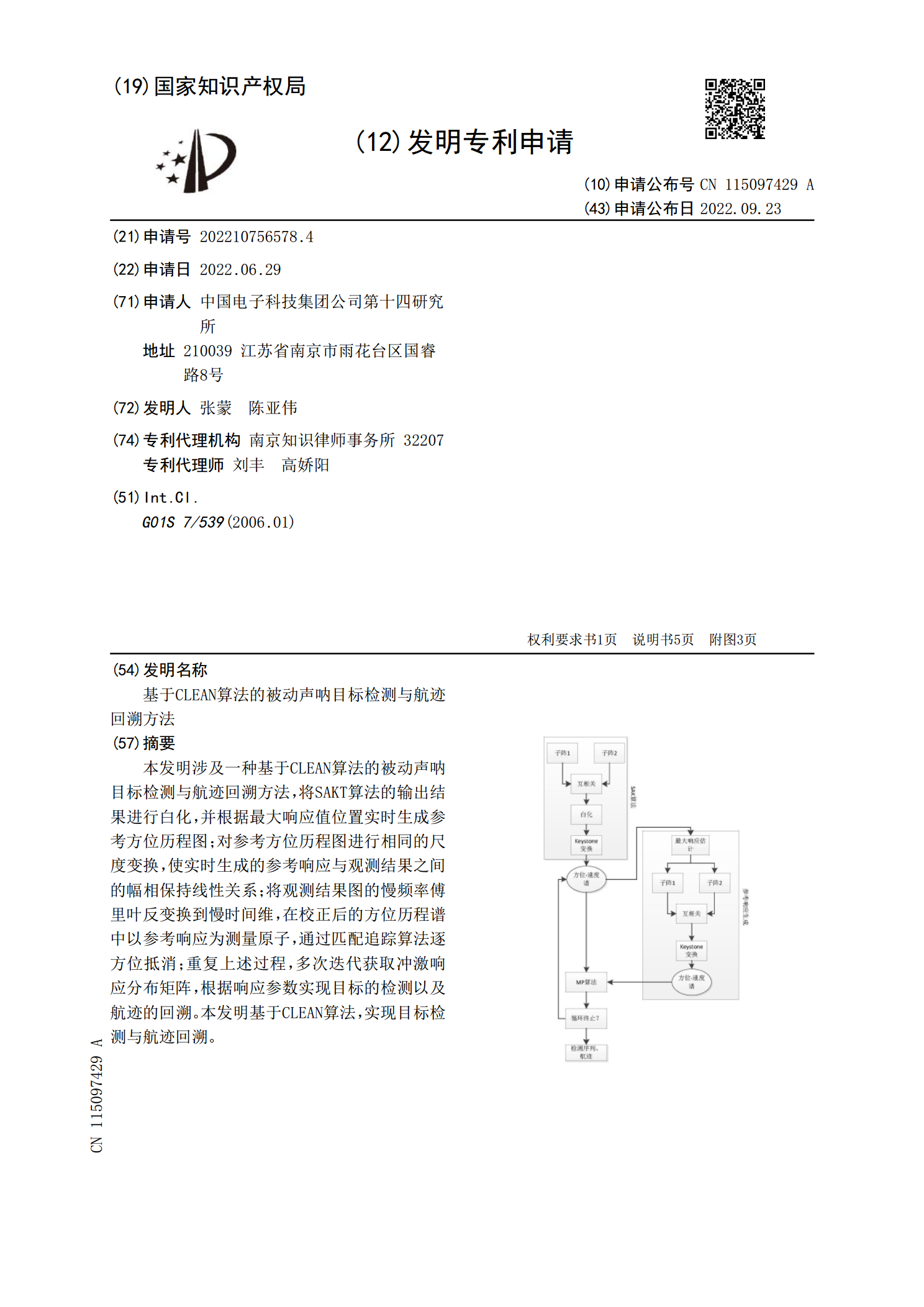
本发明涉及一种基于CLEAN算法的被动声呐目标检测与航迹回溯方法,将SAKT算法的输出结果进行白化,并根据最大响应值位置实时生成参考方位历程图;对参考方位历程图进行相同的尺度变换,使实时生成的参考响应与观测结果之间的幅相保持线性关系;将观测结果图的慢频率傅里叶反变换到慢时间维,在校正后的方位历程谱中以参考响应为测量原子,通过匹配追踪算法逐方位抵消;重复上述过程,多次迭代获取冲激响应分布矩阵,根据响应参数实现目标的检测以及航迹的回溯。本发明基于CLEAN算法,实现目标检测与航迹回溯。
基于交互式模型的航迹回溯及告警事件溯源方法.pdf
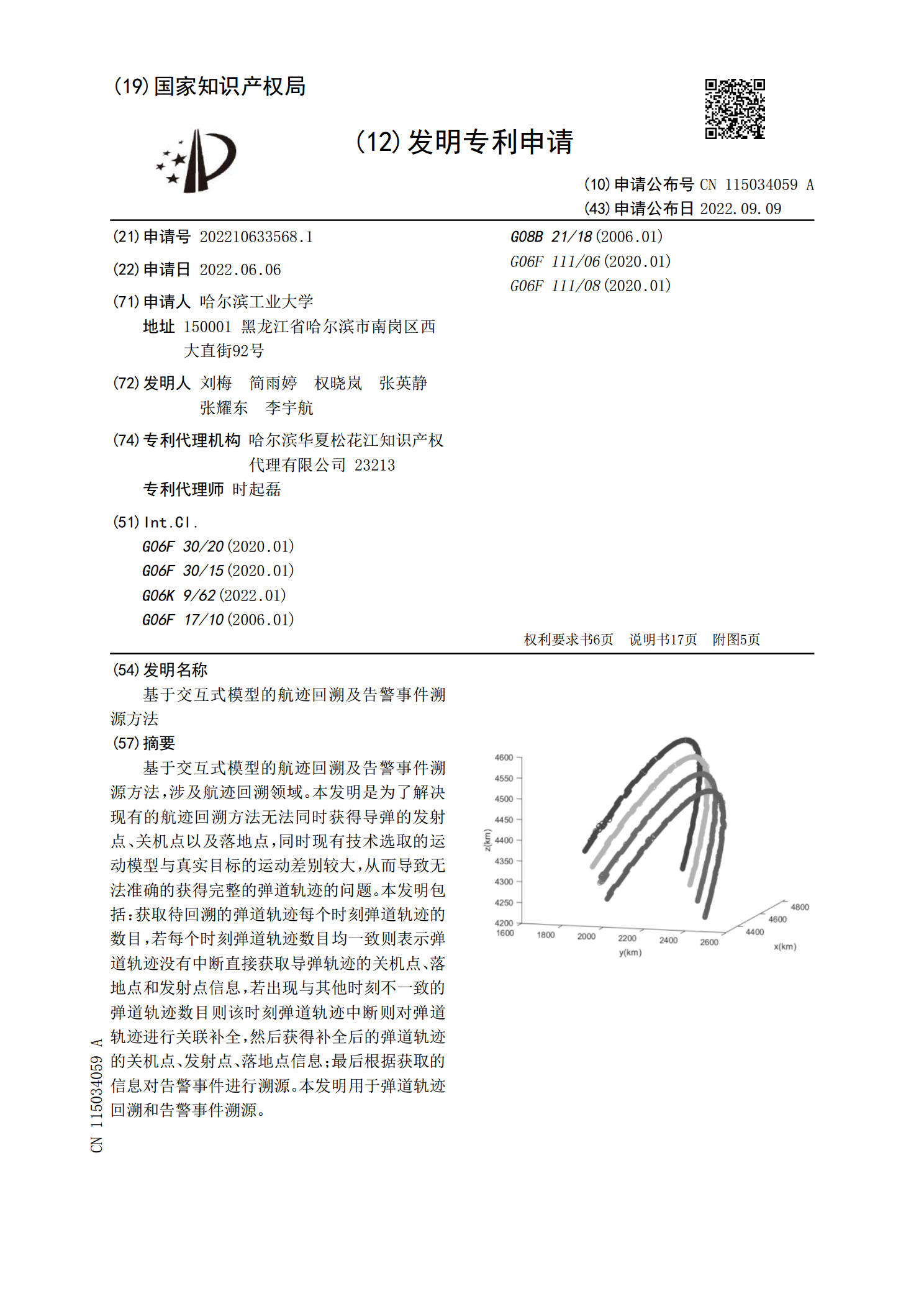
基于交互式模型的航迹回溯及告警事件溯源方法,涉及航迹回溯领域。本发明是为了解决现有的航迹回溯方法无法同时获得导弹的发射点、关机点以及落地点,同时现有技术选取的运动模型与真实目标的运动差别较大,从而导致无法准确的获得完整的弹道轨迹的问题。本发明包括:获取待回溯的弹道轨迹每个时刻弹道轨迹的数目,若每个时刻弹道轨迹数目均一致则表示弹道轨迹没有中断直接获取导弹轨迹的关机点、落地点和发射点信息,若出现与其他时刻不一致的弹道轨迹数目则该时刻弹道轨迹中断则对弹道轨迹进行关联补全,然后获得补全后的弹道轨迹的关机点、发射点
基于机载雷达主被动监视的航迹融合方法.pdf
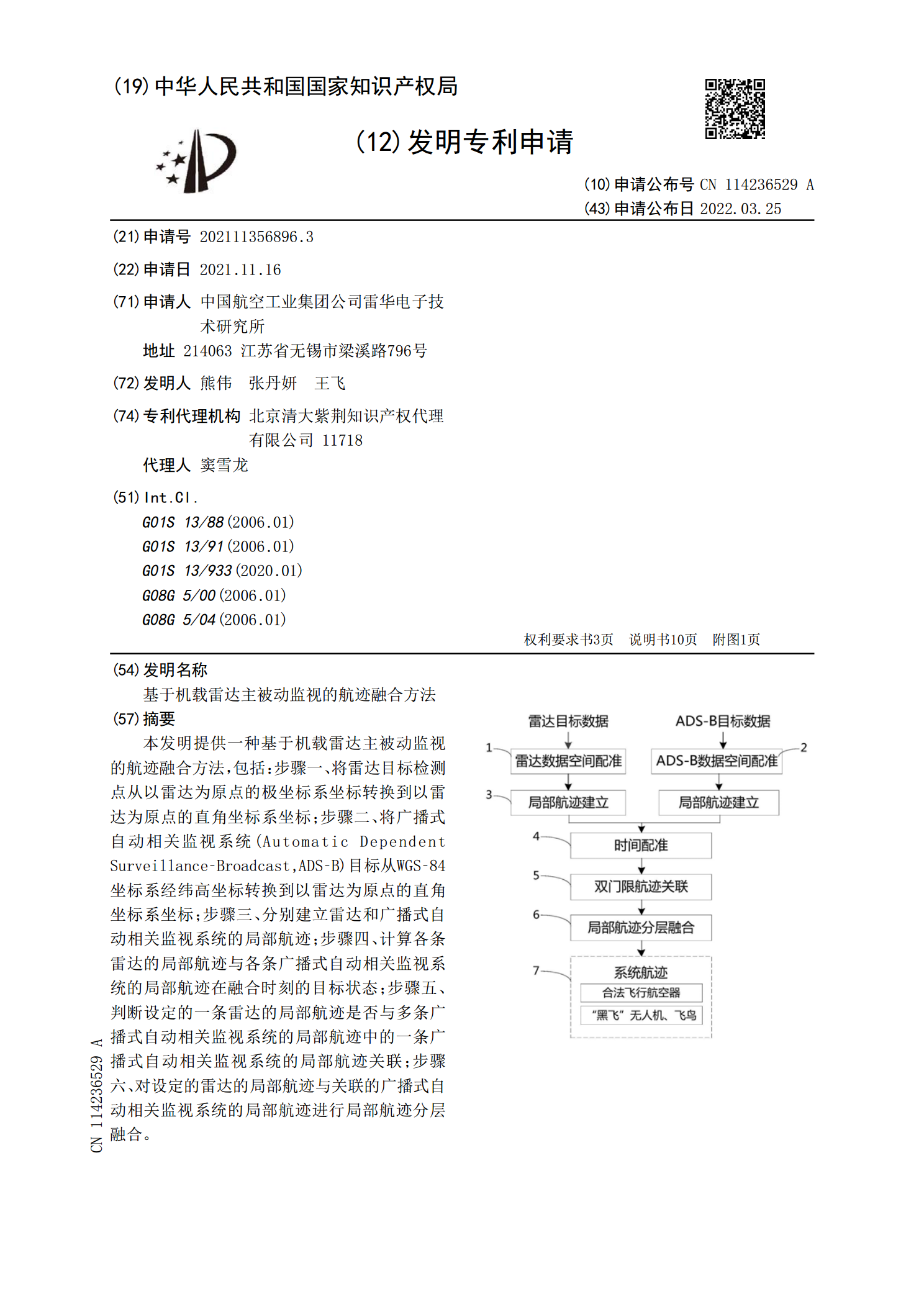
本发明提供一种基于机载雷达主被动监视的航迹融合方法,包括:步骤一、将雷达目标检测点从以雷达为原点的极坐标系坐标转换到以雷达为原点的直角坐标系坐标;步骤二、将广播式自动相关监视系统(AutomaticDependentSurveillance‑Broadcast,ADS‑B)目标从WGS‑84坐标系经纬高坐标转换到以雷达为原点的直角坐标系坐标;步骤三、分别建立雷达和广播式自动相关监视系统的局部航迹;步骤四、计算各条雷达的局部航迹与各条广播式自动相关监视系统的局部航迹在融合时刻的目标状态;步骤五、判断设定
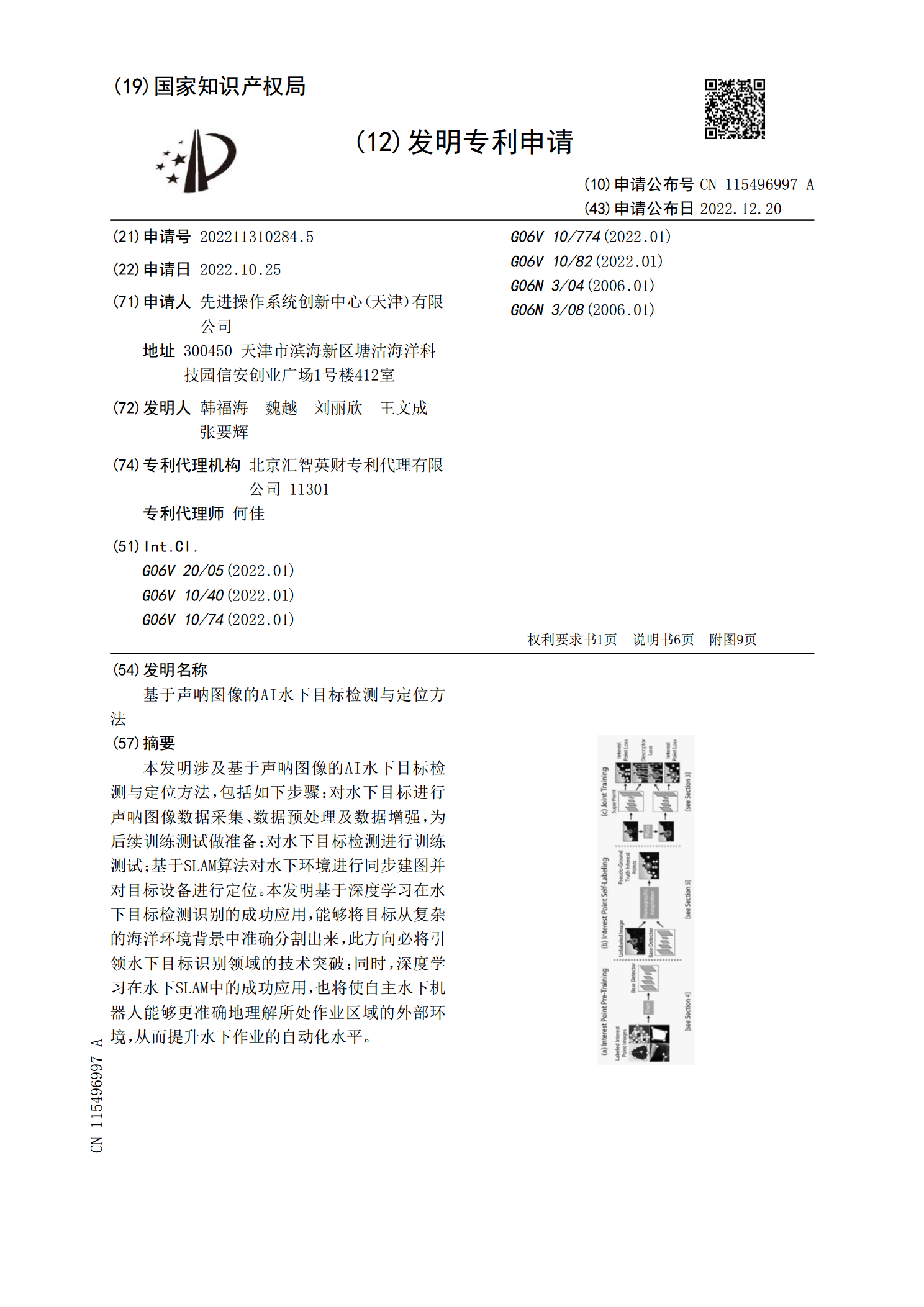
基于声呐图像的AI水下目标检测与定位方法.pdf
本发明涉及基于声呐图像的AI水下目标检测与定位方法,包括如下步骤:对水下目标进行声呐图像数据采集、数据预处理及数据增强,为后续训练测试做准备;对水下目标检测进行训练测试;基于SLAM算法对水下环境进行同步建图并对目标设备进行定位。本发明基于深度学习在水下目标检测识别的成功应用,能够将目标从复杂的海洋环境背景中准确分割出来,此方向必将引领水下目标识别领域的技术突破;同时,深度学习在水下SLAM中的成功应用,也将使自主水下机器人能够更准确地理解所处作业区域的外部环境,从而提升水下作业的自动化水平。
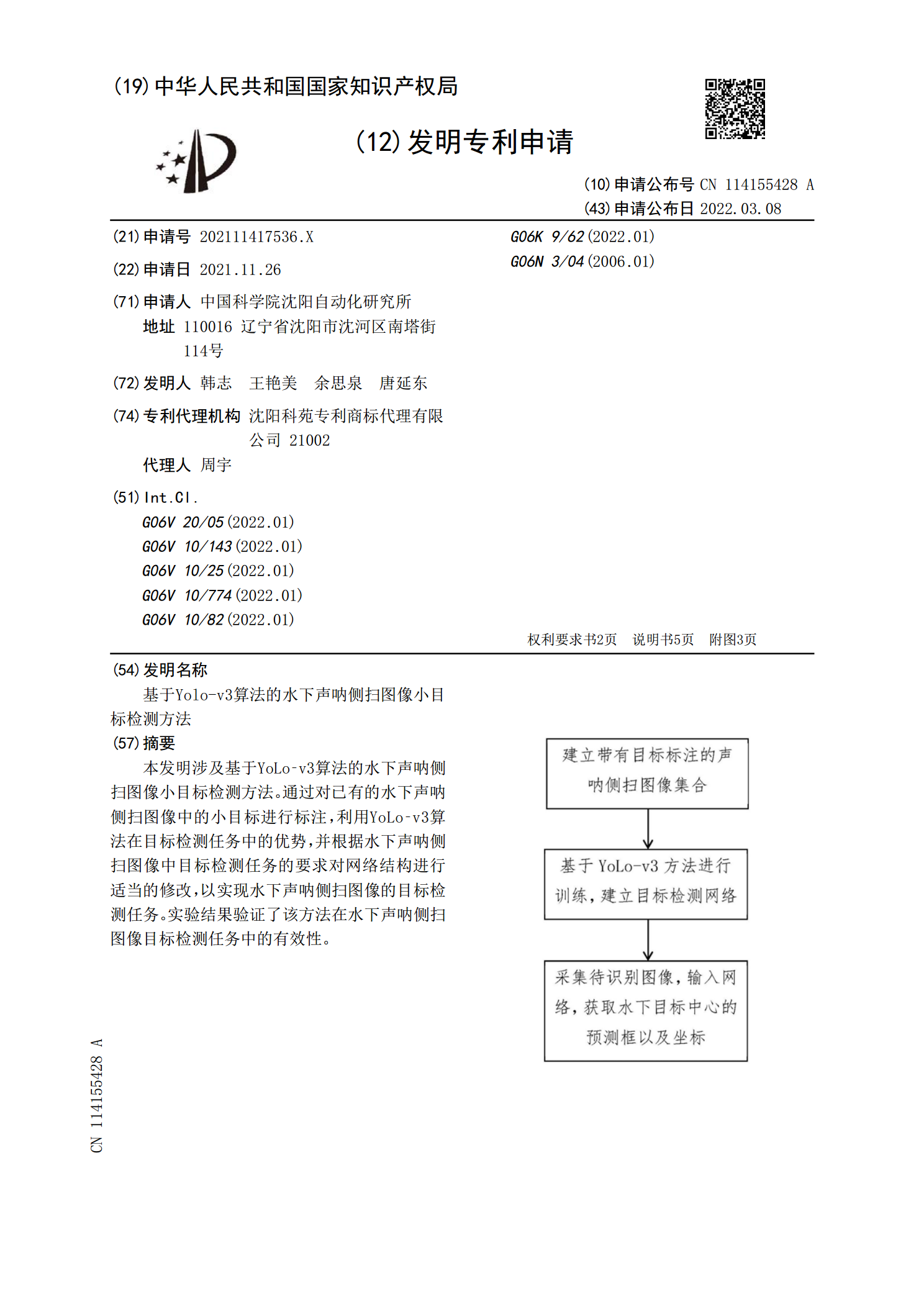
基于Yolo-v3算法的水下声呐侧扫图像小目标检测方法.pdf
本发明涉及基于YoLo‑v3算法的水下声呐侧扫图像小目标检测方法。通过对已有的水下声呐侧扫图像中的小目标进行标注,利用YoLo‑v3算法在目标检测任务中的优势,并根据水下声呐侧扫图像中目标检测任务的要求对网络结构进行适当的修改,以实现水下声呐侧扫图像的目标检测任务。实验结果验证了该方法在水下声呐侧扫图像目标检测任务中的有效性。