
一种机载相控阵雷达航迹关联方法.pdf

长春****主a


1/10

2/10
3/10

4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机载相控阵雷达航迹关联方法.pdf
本发明公开了一种机载相控阵雷达航迹关联方法,属于雷达航迹跟踪技术领域,包括以下步骤:S1:关联步骤划分;S2:径向速度门限判断;S3:门限交叉判断;S4:航迹续接。本发明通过提高航迹关联的可靠性和实时性,提升了机载相控阵雷达的航迹跟踪质量,尤其是在平台运动、跟踪目标数量多、环境杂波强的情况下;在多种坐标系下进行关联门限交叉判断,即利用目标运动特性进行门限判断,又避免了雷达量测方位与量测距离误差的耦合,同时不损失多普勒精度;当目标失跟时,对失跟航迹与新起始航迹进行航迹续接,既快速锁定失跟目标,又降低了短航迹

一种机载相控阵雷达的地杂波仿真方法.docx
一种机载相控阵雷达的地杂波仿真方法摘要:阵列雷达是现代雷达技术中的重要组成部分,而相控阵雷达是阵列雷达的一种关键技术。地杂波是影响雷达性能的重要因素之一,对于相控阵雷达的地杂波仿真方法的研究具有重要意义。本文首先介绍了相控阵雷达的基本原理和结构,然后详细阐述了地杂波的来源和影响,接着提出了一种机载相控阵雷达的地杂波仿真方法,并给出了详细的仿真步骤和结果分析。最后,总结了本文的主要工作和创新之处,并对未来的研究方向进行了展望。关键词:相控阵雷达,地杂波,仿真方法1.引言相控阵雷达是一种利用多个发射/接收单元

基于航迹协同的相控阵雷达干扰方法研究.docx
基于航迹协同的相控阵雷达干扰方法研究标题:基于航迹协同的相控阵雷达干扰方法研究摘要:随着电子战技术的不断发展,相控阵雷达作为一种重要的电子战手段,受到了广泛的关注。在传统的干扰方法中,常常会因为雷达自身的优势而导致干扰效果不佳。为了克服这个问题,航迹协同技术被引入到相控阵雷达干扰中,以实现更有效的干扰效果。本文将详细介绍基于航迹协同的相控阵雷达干扰方法的研究,并进行深入分析和讨论。实验结果表明,基于航迹协同的相控阵雷达干扰方法能够有效地干扰敌方雷达系统,为实战中的电子战提供了有力支持。关键词:相控阵雷达,
基于机载雷达主被动监视的航迹融合方法.pdf
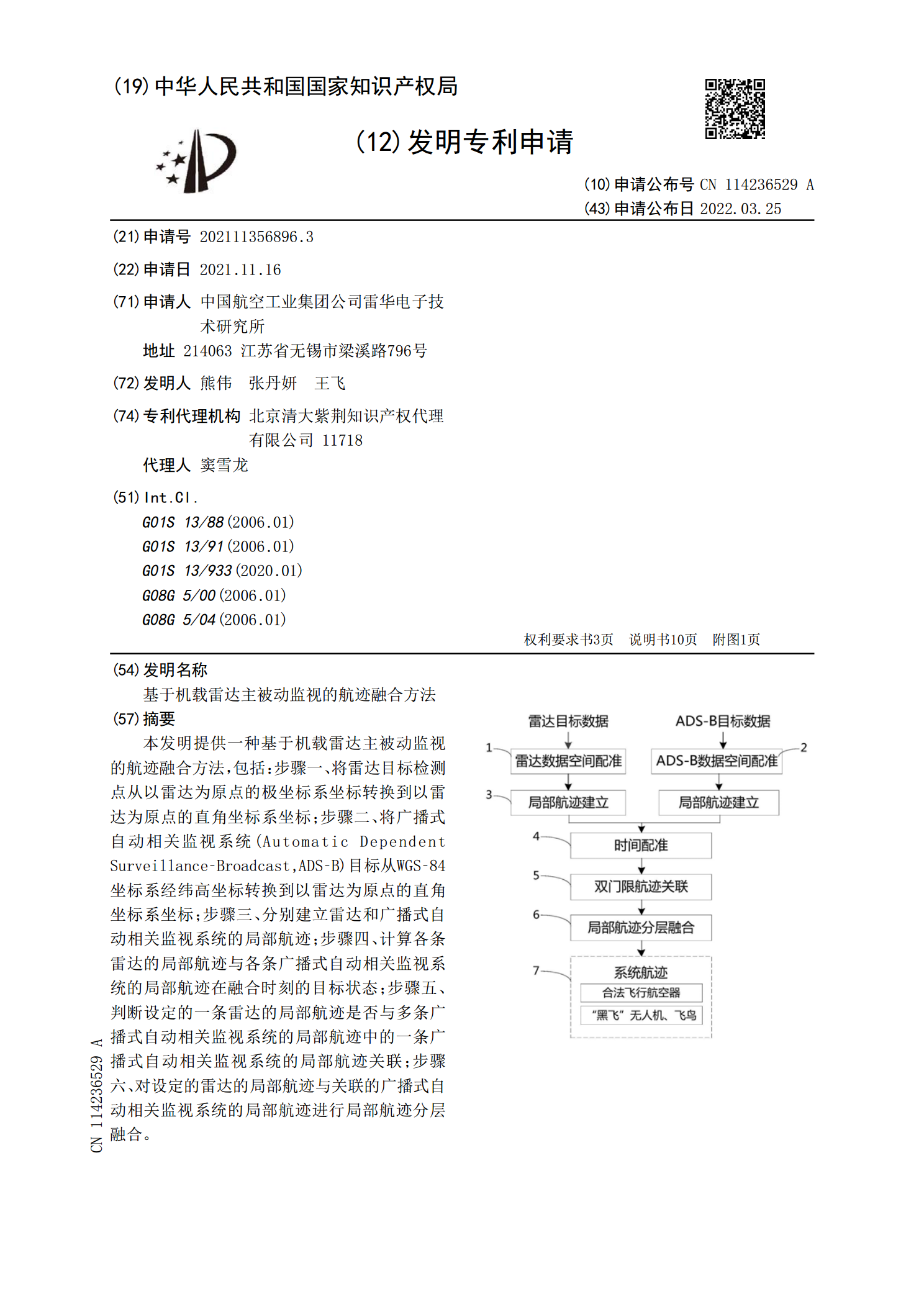
本发明提供一种基于机载雷达主被动监视的航迹融合方法,包括:步骤一、将雷达目标检测点从以雷达为原点的极坐标系坐标转换到以雷达为原点的直角坐标系坐标;步骤二、将广播式自动相关监视系统(AutomaticDependentSurveillance‑Broadcast,ADS‑B)目标从WGS‑84坐标系经纬高坐标转换到以雷达为原点的直角坐标系坐标;步骤三、分别建立雷达和广播式自动相关监视系统的局部航迹;步骤四、计算各条雷达的局部航迹与各条广播式自动相关监视系统的局部航迹在融合时刻的目标状态;步骤五、判断设定

基于地杂波扩展的机载相控阵雷达干扰方法.pptx
基于地杂波扩展的机载相控阵雷达干扰方法目录添加目录项标题地杂波扩展的基本原理地杂波的产生地杂波的特性地杂波对雷达的影响机载相控阵雷达的工作原理相控阵雷达的基本概念机载相控阵雷达的特点机载相控阵雷达的工作流程基于地杂波扩展的干扰方法干扰原理干扰信号的设计干扰效果评估干扰方法的应用场景和优势应用场景分析干扰方法的优势干扰方法的效果预期干扰方法存在的挑战和应对策略存在的挑战应对策略未来研究方向结论总结展望感谢观看