
一种基于点选航迹及航迹外推的雷达目标追赶跟踪方法.pdf

小寄****淑k

1/9

2/9

3/9

4/9
5/9
6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于点选航迹及航迹外推的雷达目标追赶跟踪方法.pdf
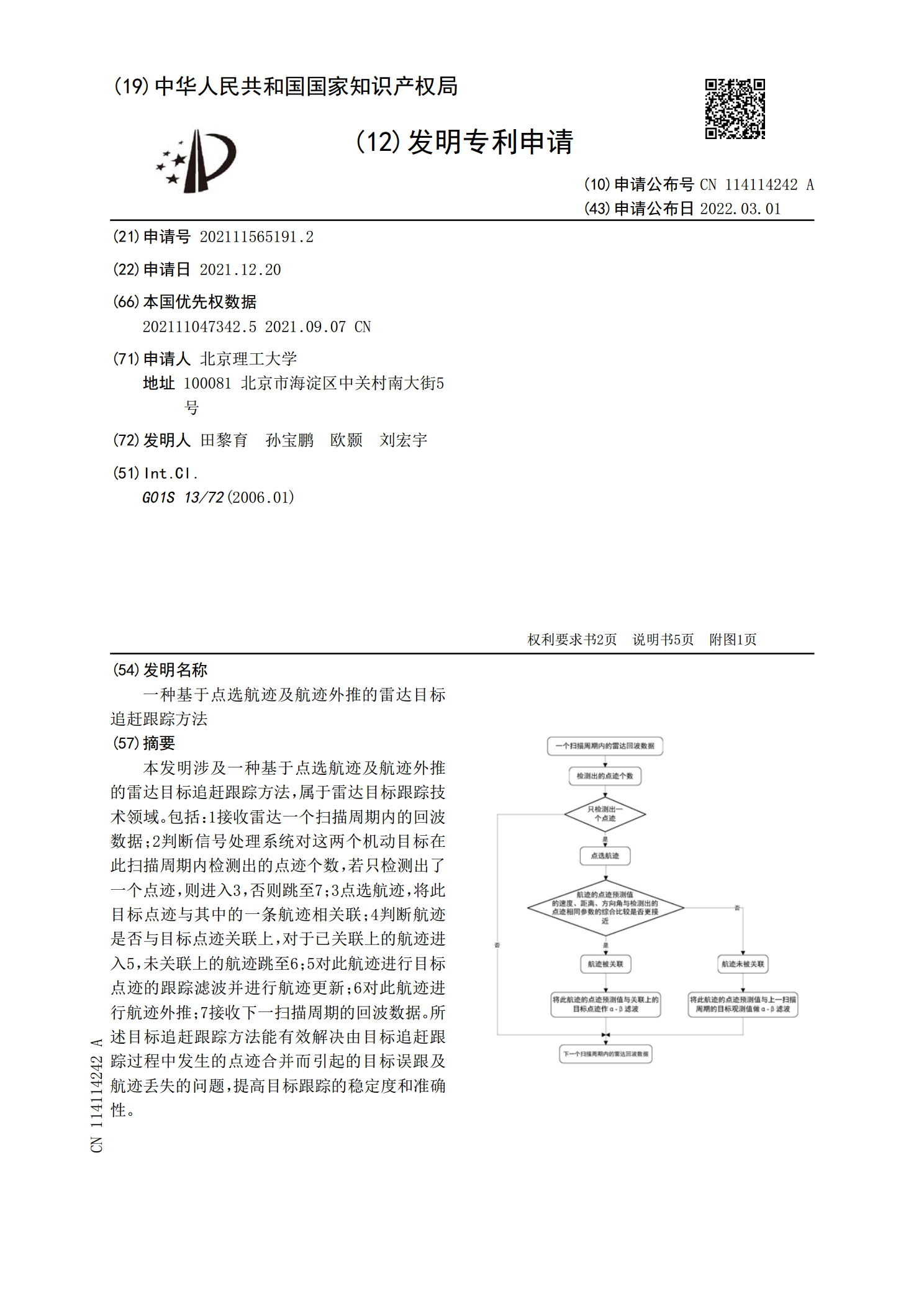
本发明涉及一种基于点选航迹及航迹外推的雷达目标追赶跟踪方法,属于雷达目标跟踪技术领域。包括:1接收雷达一个扫描周期内的回波数据;2判断信号处理系统对这两个机动目标在此扫描周期内检测出的点迹个数,若只检测出了一个点迹,则进入3,否则跳至7;3点选航迹,将此目标点迹与其中的一条航迹相关联;4判断航迹是否与目标点迹关联上,对于已关联上的航迹进入5,未关联上的航迹跳至6;5对此航迹进行目标点迹的跟踪滤波并进行航迹更新;6对此航迹进行航迹外推;7接收下一扫描周期的回波数据。所述目标追赶跟踪方法能有效解决由目标追赶跟

一种海上雷达目标航迹拼接方法.pdf
本发明公开了一种海上雷达目标航迹拼接方法。包括以下步骤:S1:获取雷达原始数据图像,对图像中的海上目标进行特征提取、海杂波剔除和数据矫正;S2:对同一海上目标航行过程中出现的航迹缺失进行轨迹关联,使航迹数据缺失段前后航迹在经过多因素欧氏和马氏距离计算后建立关联关系;S3:针对已建立关联关系的航迹,分别获取到数据缺失段最前及最后时刻点位数据,完成中间数据插值拼接,将拼接后规范、完整的航迹进行实时输出与显示。本方案从多因素采取点位关联关系确认与筛选;对雷达原始数据解析及进行特征提取、海杂波剔除和数据矫正等预处

一种基于宽带雷达回波的航迹起始方法.docx
一种基于宽带雷达回波的航迹起始方法航迹起始是雷达信号处理的一个重要环节,目的是确定目标的起点并提供必要的起飞点数据,以便后续跟踪和识别。传统的起始方法主要基于目标的特征,例如目标的反射面积、峰值信号等,然而这些方法无法处理低信噪比环境和多目标干扰的情况。为了解决这些问题,本文提出了一种基于宽带雷达回波的航迹起始方法。一、宽带雷达原理宽带雷达是一种传感器,其工作原理类似于扫描电子显微镜。它使用宽带脉冲,将雷达发射的能量转换为精确定位的信号。它能够提供高分辨率的目标信号,并且在短时间内检测大范围内的物体。与传

基于卡尔曼滤波的雷达航迹跟踪算法的综述.docx
基于卡尔曼滤波的雷达航迹跟踪算法的综述基于卡尔曼滤波的雷达航迹跟踪算法的综述摘要:雷达航迹跟踪是无人系统、航空航天等领域中的关键技术,对目标的位置、速度、轨迹进行准确跟踪具有重要意义。卡尔曼滤波作为一种经典的估计方法,在雷达航迹跟踪中被广泛应用。本文综述了基于卡尔曼滤波的雷达航迹跟踪算法的原理和关键技术,包括系统建模、观测模型、状态估计和航迹更新等方面。通过分析和比较不同的卡尔曼滤波算法,总结了各自的优缺点,并探讨了未来的研究方向。关键词:雷达航迹跟踪;卡尔曼滤波;系统建模;观测模型;状态估计1.引言在现

基于FCM的雷达多目标航迹相关的综述报告.docx
基于FCM的雷达多目标航迹相关的综述报告FCM(FuzzyC-Means)模糊聚类算法在雷达多目标跟踪中得到了广泛的应用,该算法可实现检测、定位、识别跟踪多个目标,并实现航迹相关,解决了多目标跟踪领域中的一系列研究问题。本文将对基于FCM的雷达多目标航迹相关研究进行综述。1.FCM算法FCM算法是一种基于模糊数学的聚类算法,可以将数据分成多个类别。该算法是由Dunn和Bezdek发明的,是基于模糊理论和聚类分析的理论结合体,是目前最为流行和广泛应用的聚类算法之一。FCM算法的核心思想是给每个数据点赋予一个