
一种基于高精度地图的高速场景多雷达航迹融合方法.pdf

斌斌****公主

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于高精度地图的高速场景多雷达航迹融合方法.pdf
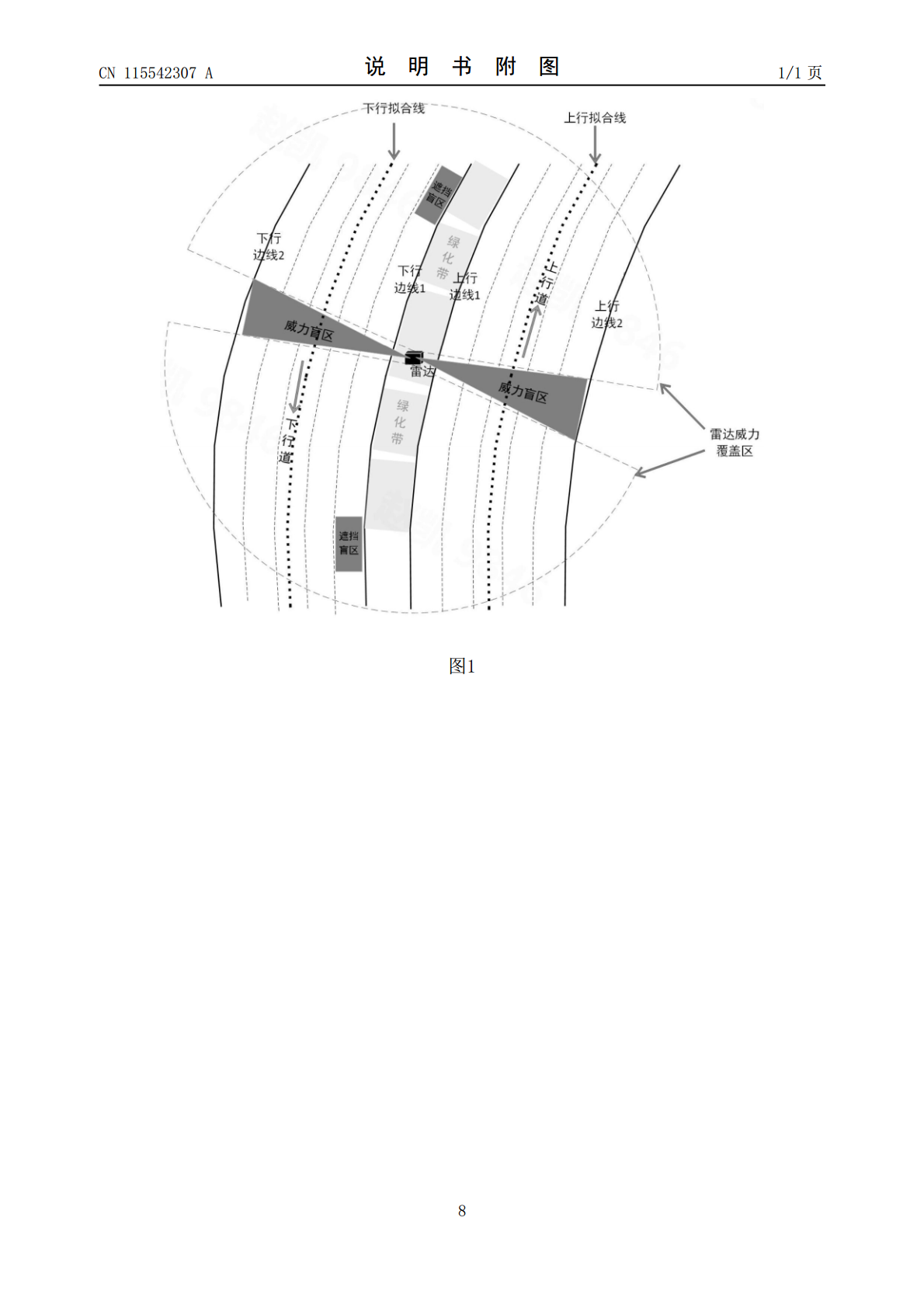
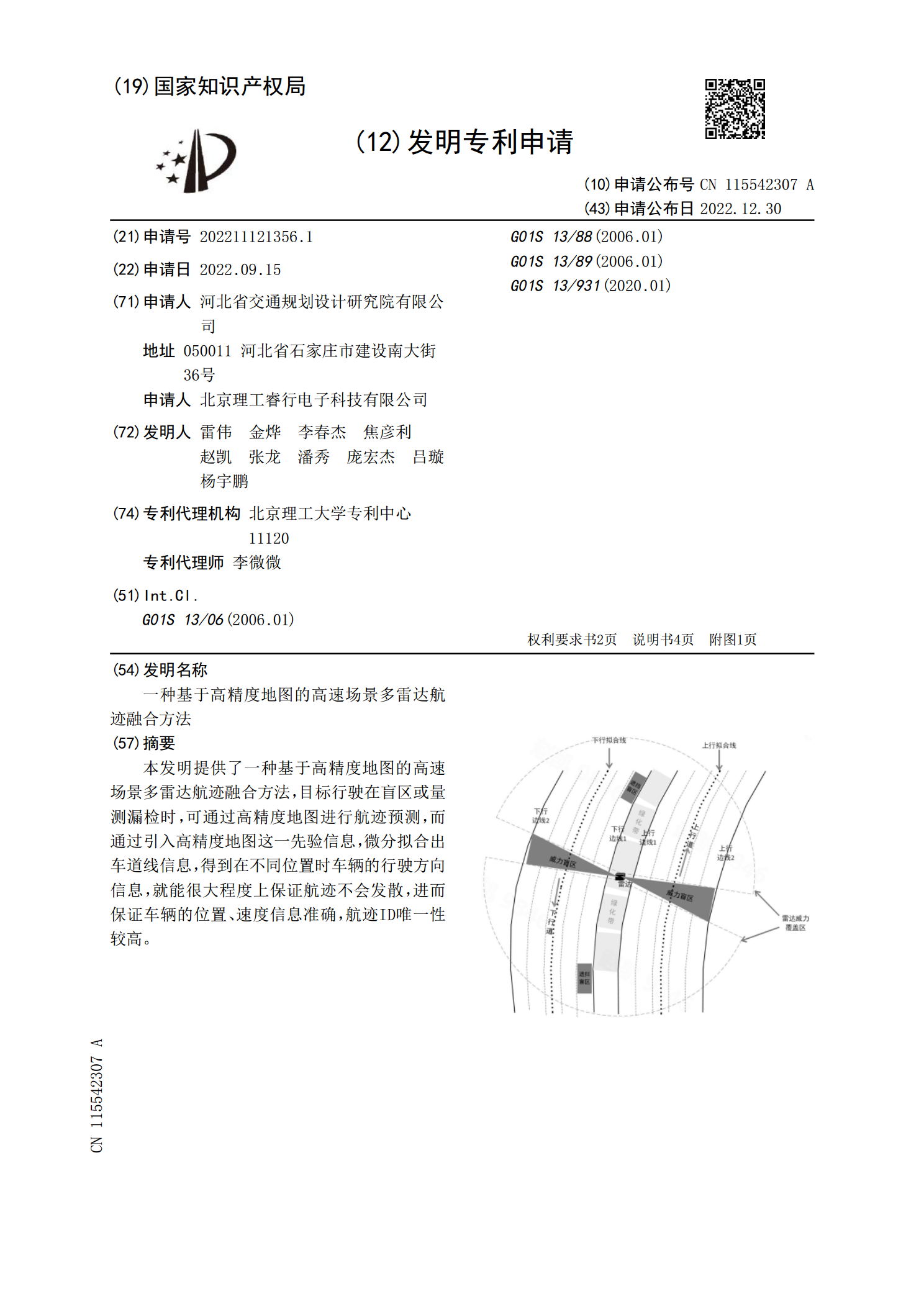
本发明提供了一种基于高精度地图的高速场景多雷达航迹融合方法,目标行驶在盲区或量测漏检时,可通过高精度地图进行航迹预测,而通过引入高精度地图这一先验信息,微分拟合出车道线信息,得到在不同位置时车辆的行驶方向信息,就能很大程度上保证航迹不会发散,进而保证车辆的位置、速度信息准确,航迹ID唯一性较高。
基于机载雷达主被动监视的航迹融合方法.pdf
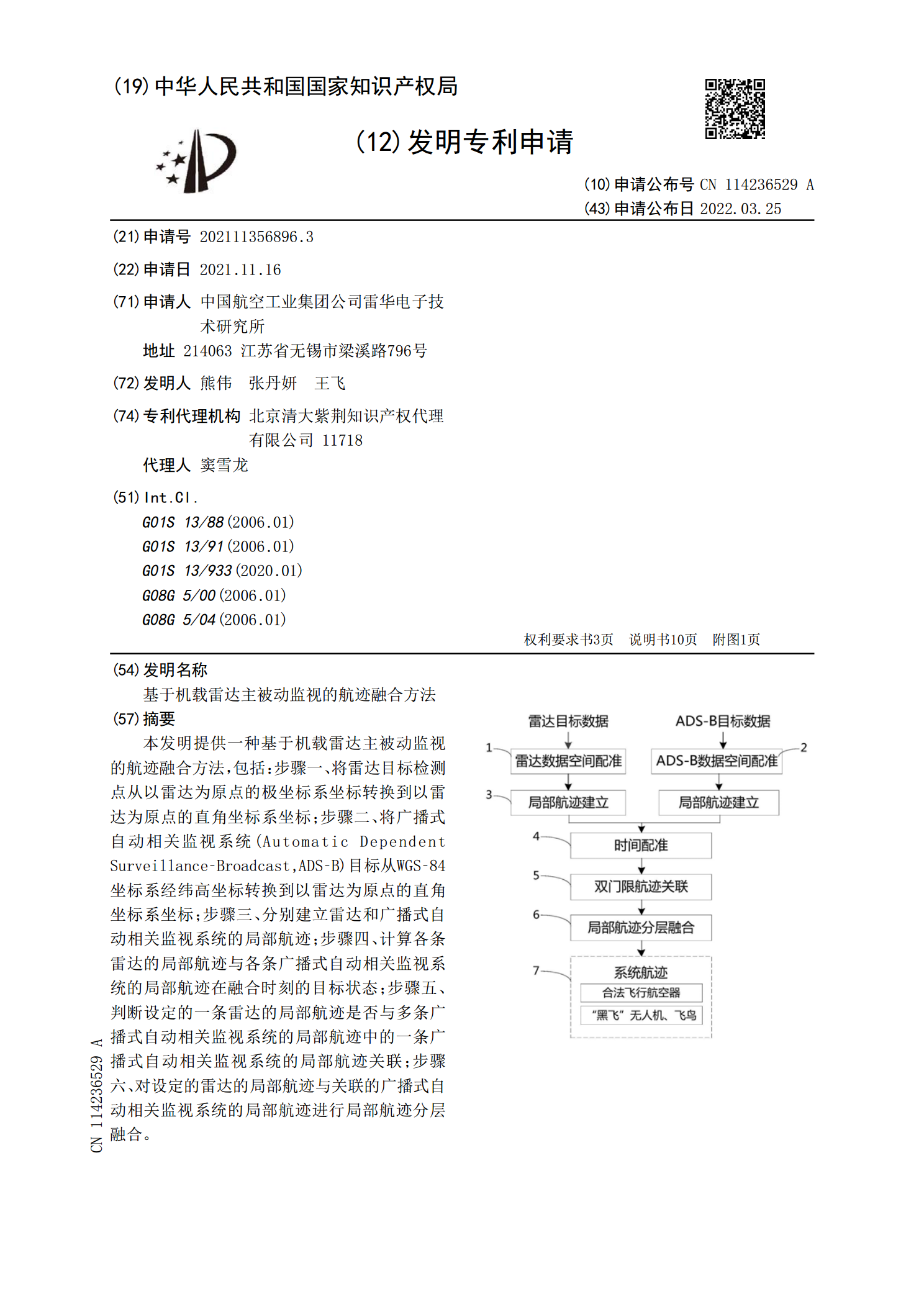
本发明提供一种基于机载雷达主被动监视的航迹融合方法,包括:步骤一、将雷达目标检测点从以雷达为原点的极坐标系坐标转换到以雷达为原点的直角坐标系坐标;步骤二、将广播式自动相关监视系统(AutomaticDependentSurveillance‑Broadcast,ADS‑B)目标从WGS‑84坐标系经纬高坐标转换到以雷达为原点的直角坐标系坐标;步骤三、分别建立雷达和广播式自动相关监视系统的局部航迹;步骤四、计算各条雷达的局部航迹与各条广播式自动相关监视系统的局部航迹在融合时刻的目标状态;步骤五、判断设定
一种基于单路口多传感器的航迹融合方法及系统.pdf
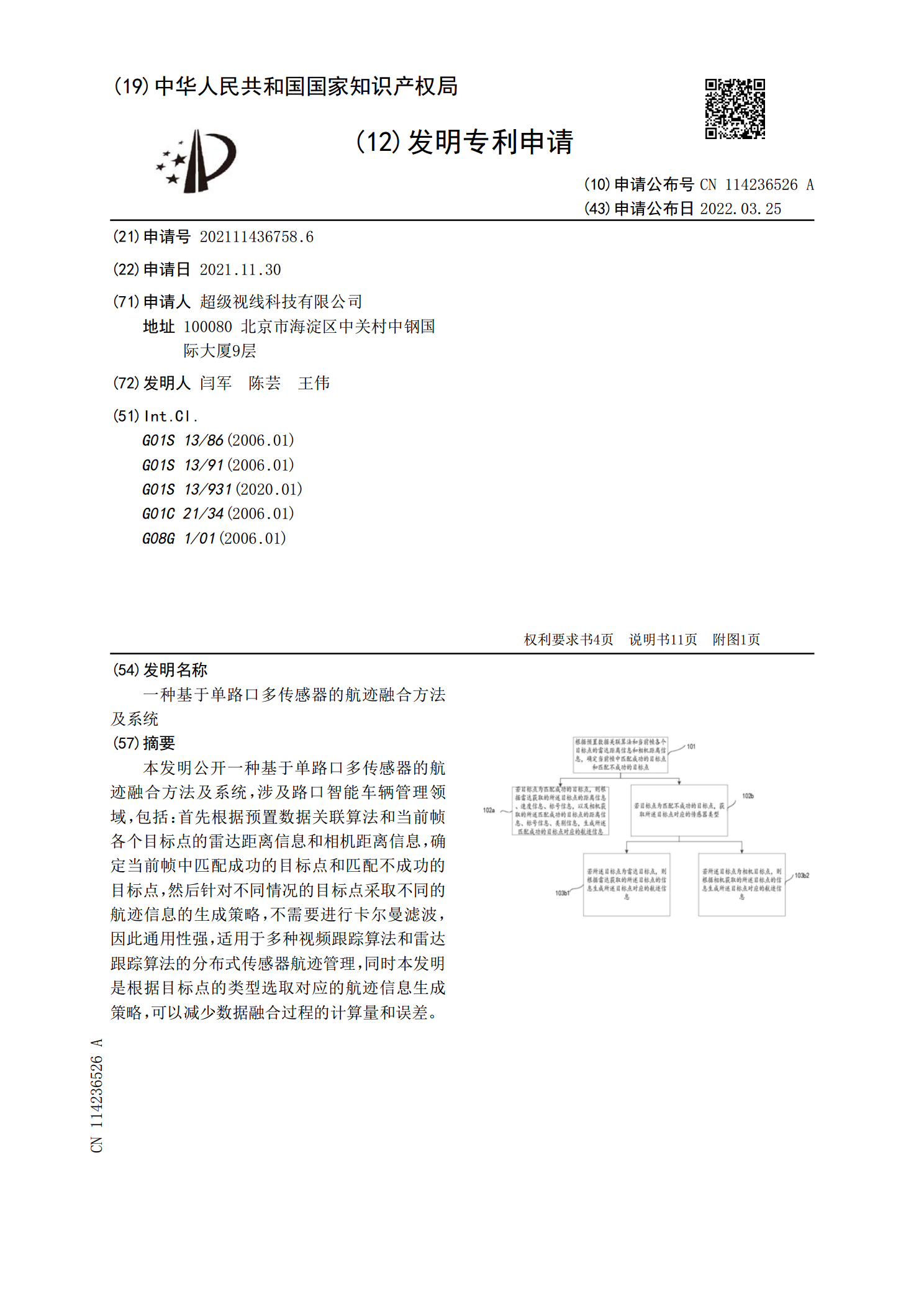
本发明公开一种基于单路口多传感器的航迹融合方法及系统,涉及路口智能车辆管理领域,包括:首先根据预置数据关联算法和当前帧各个目标点的雷达距离信息和相机距离信息,确定当前帧中匹配成功的目标点和匹配不成功的目标点,然后针对不同情况的目标点采取不同的航迹信息的生成策略,不需要进行卡尔曼滤波,因此通用性强,适用于多种视频跟踪算法和雷达跟踪算法的分布式传感器航迹管理,同时本发明是根据目标点的类型选取对应的航迹信息生成策略,可以减少数据融合过程的计算量和误差。
一种基于多尺度特征融合的雷达目标检测方法.pdf
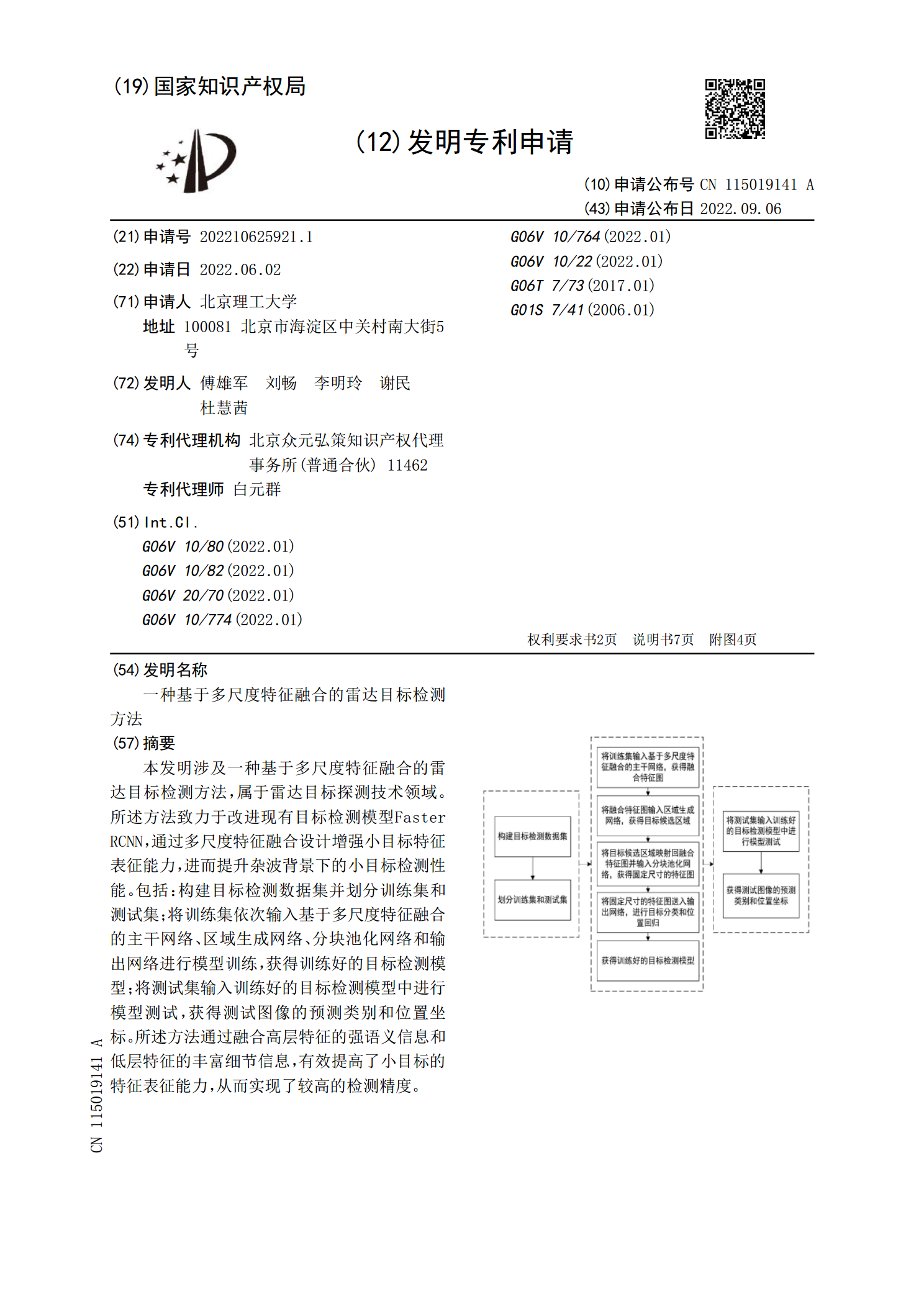
本发明涉及一种基于多尺度特征融合的雷达目标检测方法,属于雷达目标探测技术领域。所述方法致力于改进现有目标检测模型FasterRCNN,通过多尺度特征融合设计增强小目标特征表征能力,进而提升杂波背景下的小目标检测性能。包括:构建目标检测数据集并划分训练集和测试集;将训练集依次输入基于多尺度特征融合的主干网络、区域生成网络、分块池化网络和输出网络进行模型训练,获得训练好的目标检测模型;将测试集输入训练好的目标检测模型中进行模型测试,获得测试图像的预测类别和位置坐标。所述方法通过融合高层特征的强语义信息和低层
一种基于点选航迹及航迹外推的雷达目标追赶跟踪方法.pdf
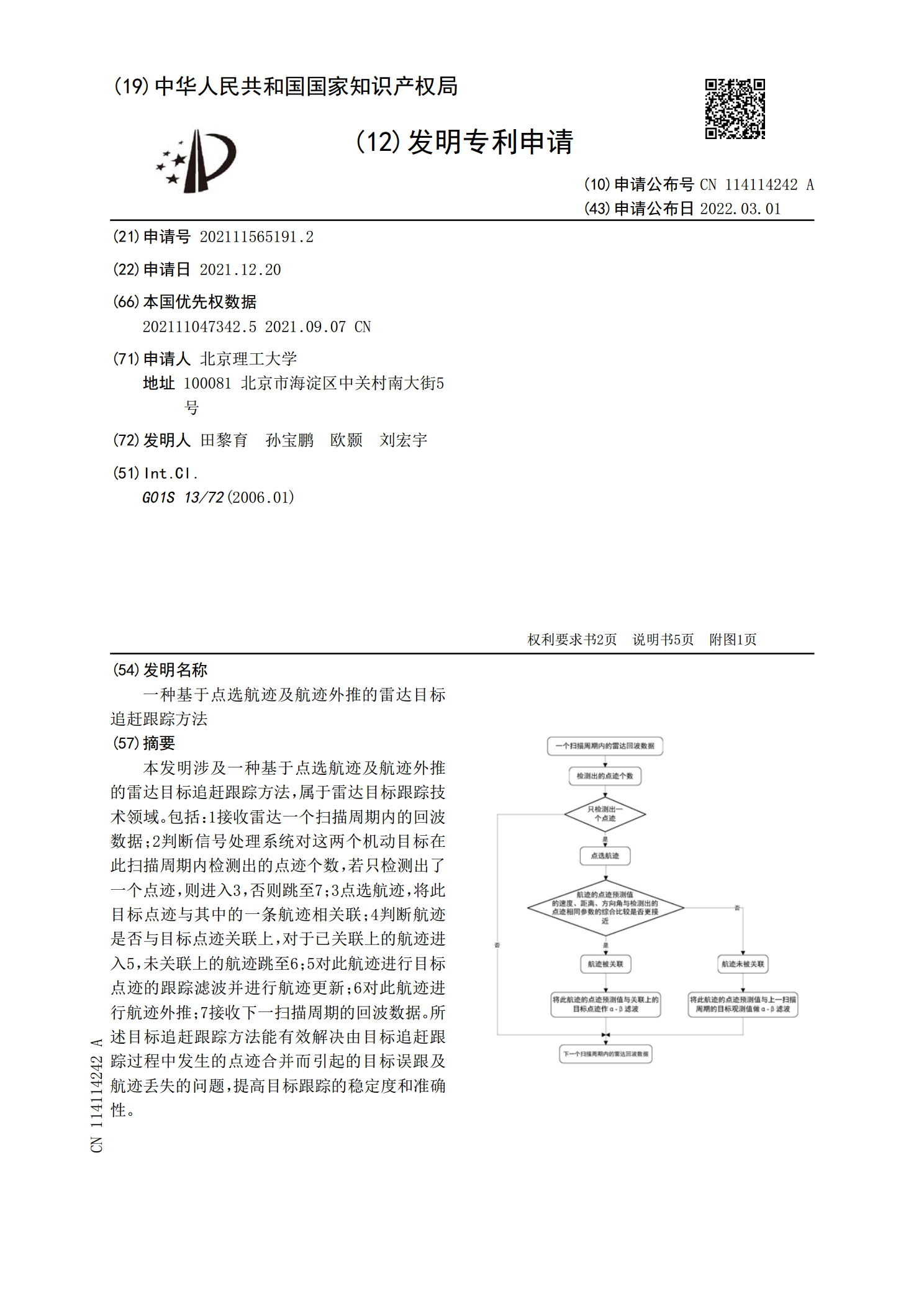
本发明涉及一种基于点选航迹及航迹外推的雷达目标追赶跟踪方法,属于雷达目标跟踪技术领域。包括:1接收雷达一个扫描周期内的回波数据;2判断信号处理系统对这两个机动目标在此扫描周期内检测出的点迹个数,若只检测出了一个点迹,则进入3,否则跳至7;3点选航迹,将此目标点迹与其中的一条航迹相关联;4判断航迹是否与目标点迹关联上,对于已关联上的航迹进入5,未关联上的航迹跳至6;5对此航迹进行目标点迹的跟踪滤波并进行航迹更新;6对此航迹进行航迹外推;7接收下一扫描周期的回波数据。所述目标追赶跟踪方法能有效解决由目标追赶跟