
车辆的转向控制方法、装置和车辆.pdf

涵蓄****09

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆的转向控制方法、装置和车辆.pdf
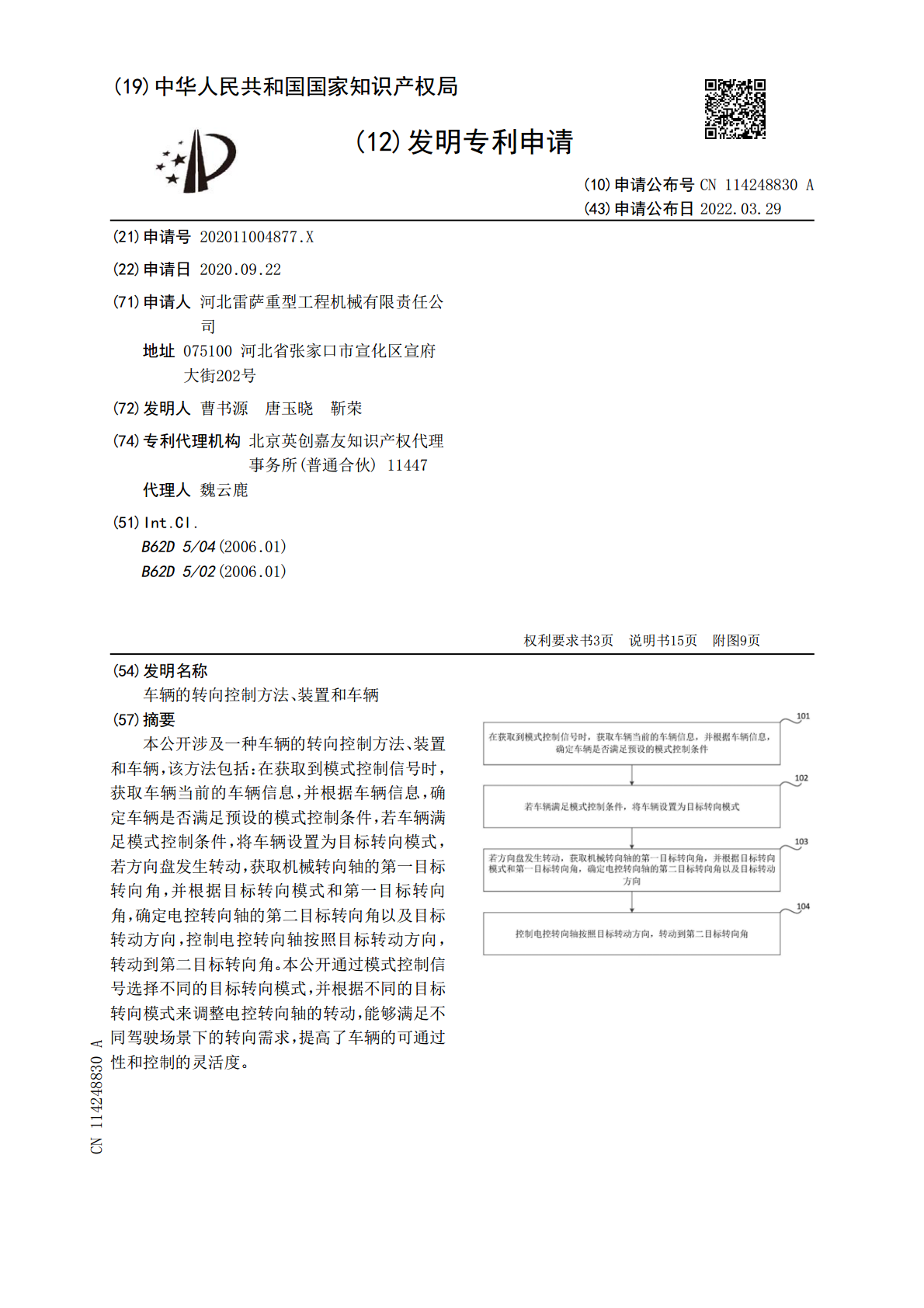
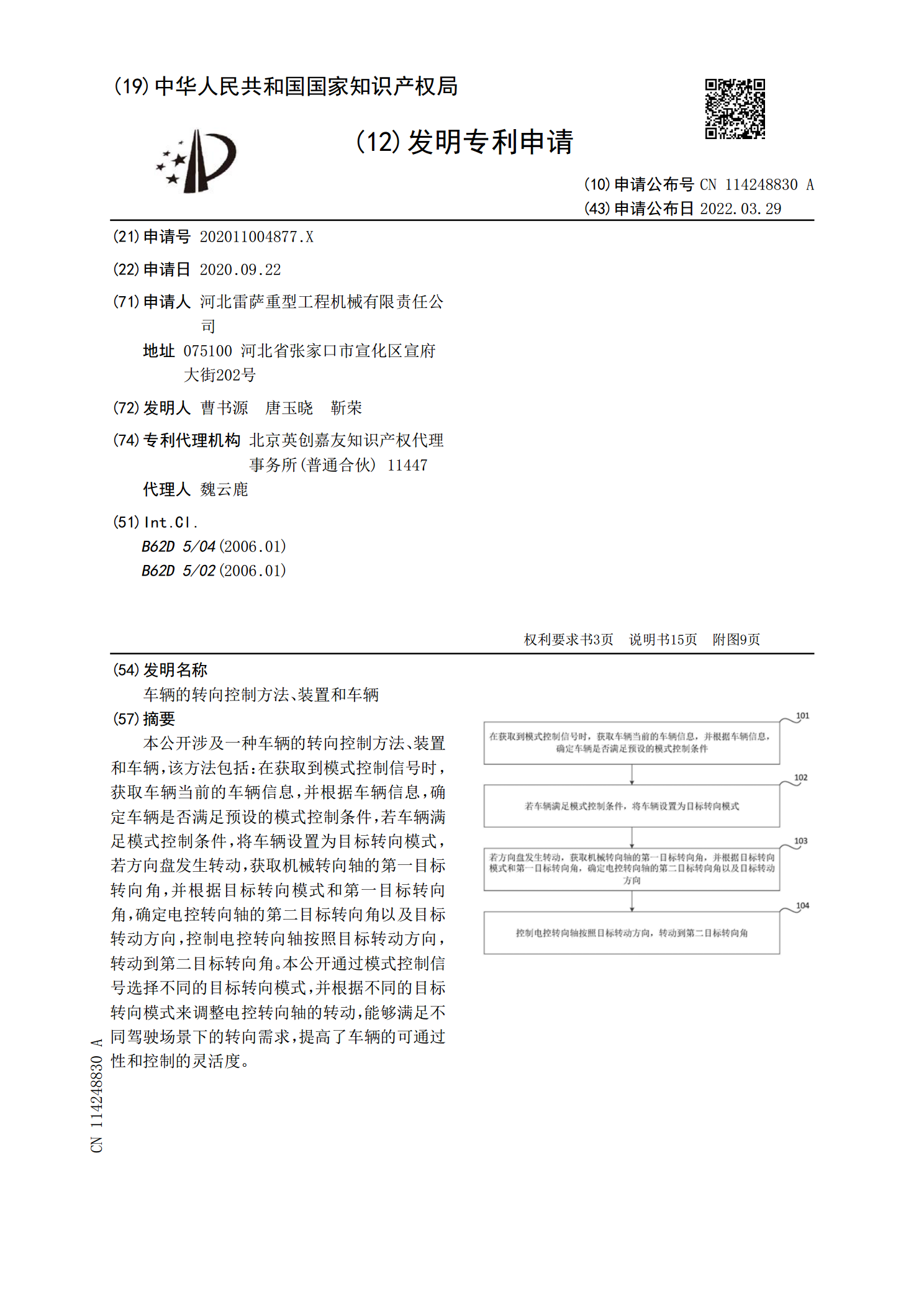
本公开涉及一种车辆的转向控制方法、装置和车辆,该方法包括:在获取到模式控制信号时,获取车辆当前的车辆信息,并根据车辆信息,确定车辆是否满足预设的模式控制条件,若车辆满足模式控制条件,将车辆设置为目标转向模式,若方向盘发生转动,获取机械转向轴的第一目标转向角,并根据目标转向模式和第一目标转向角,确定电控转向轴的第二目标转向角以及目标转动方向,控制电控转向轴按照目标转动方向,转动到第二目标转向角。本公开通过模式控制信号选择不同的目标转向模式,并根据不同的目标转向模式来调整电控转向轴的转动,能够满足不同驾驶场景
车辆转向控制方法、装置和车辆.pdf
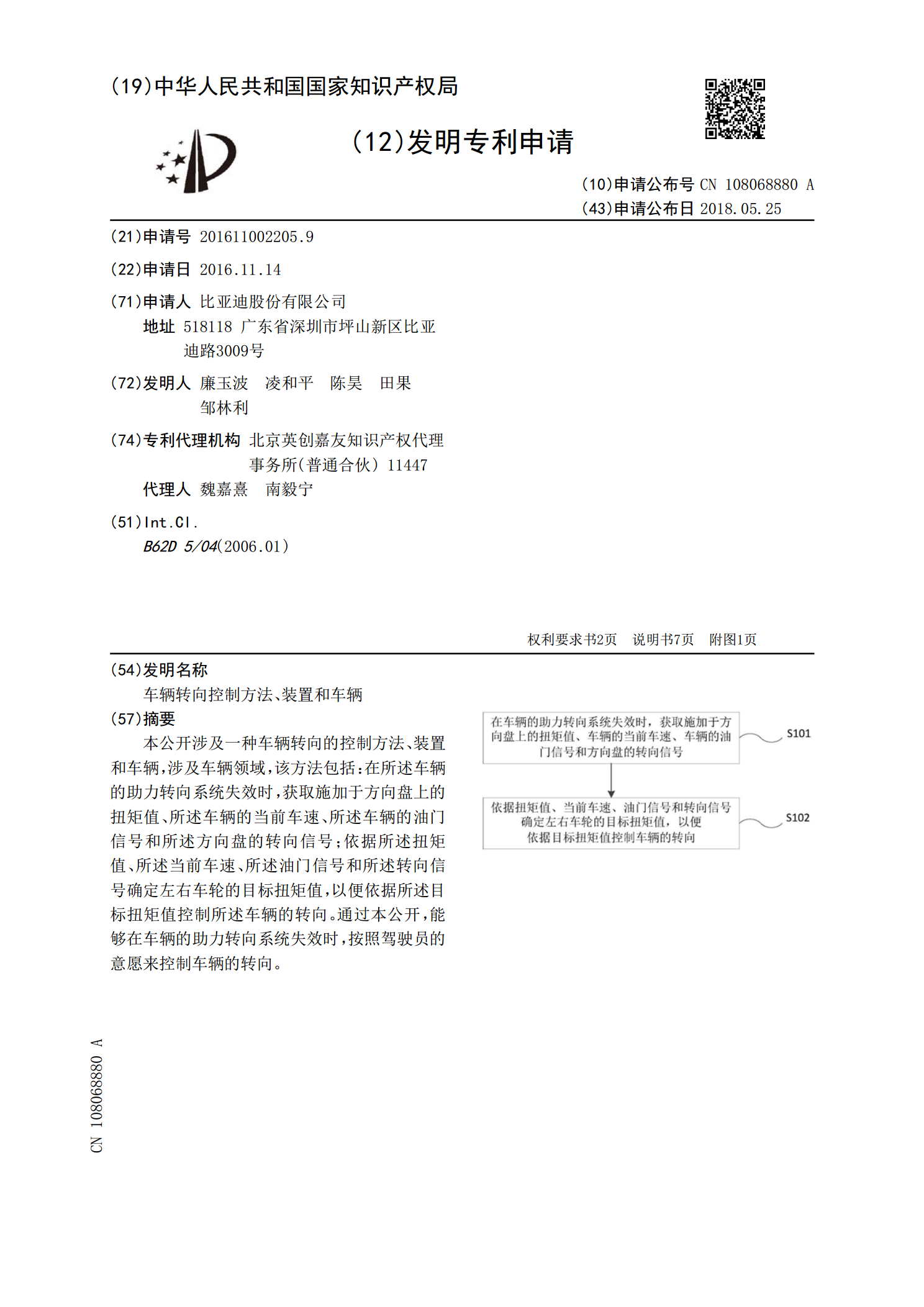
本公开涉及一种车辆转向的控制方法、装置和车辆,涉及车辆领域,该方法包括:在所述车辆的助力转向系统失效时,获取施加于方向盘上的扭矩值、所述车辆的当前车速、所述车辆的油门信号和所述方向盘的转向信号;依据所述扭矩值、所述当前车速、所述油门信号和所述转向信号确定左右车轮的目标扭矩值,以便依据所述目标扭矩值控制所述车辆的转向。通过本公开,能够在车辆的助力转向系统失效时,按照驾驶员的意愿来控制车辆的转向。
车辆转向控制方法与装置、车辆转向系统、车辆.pdf
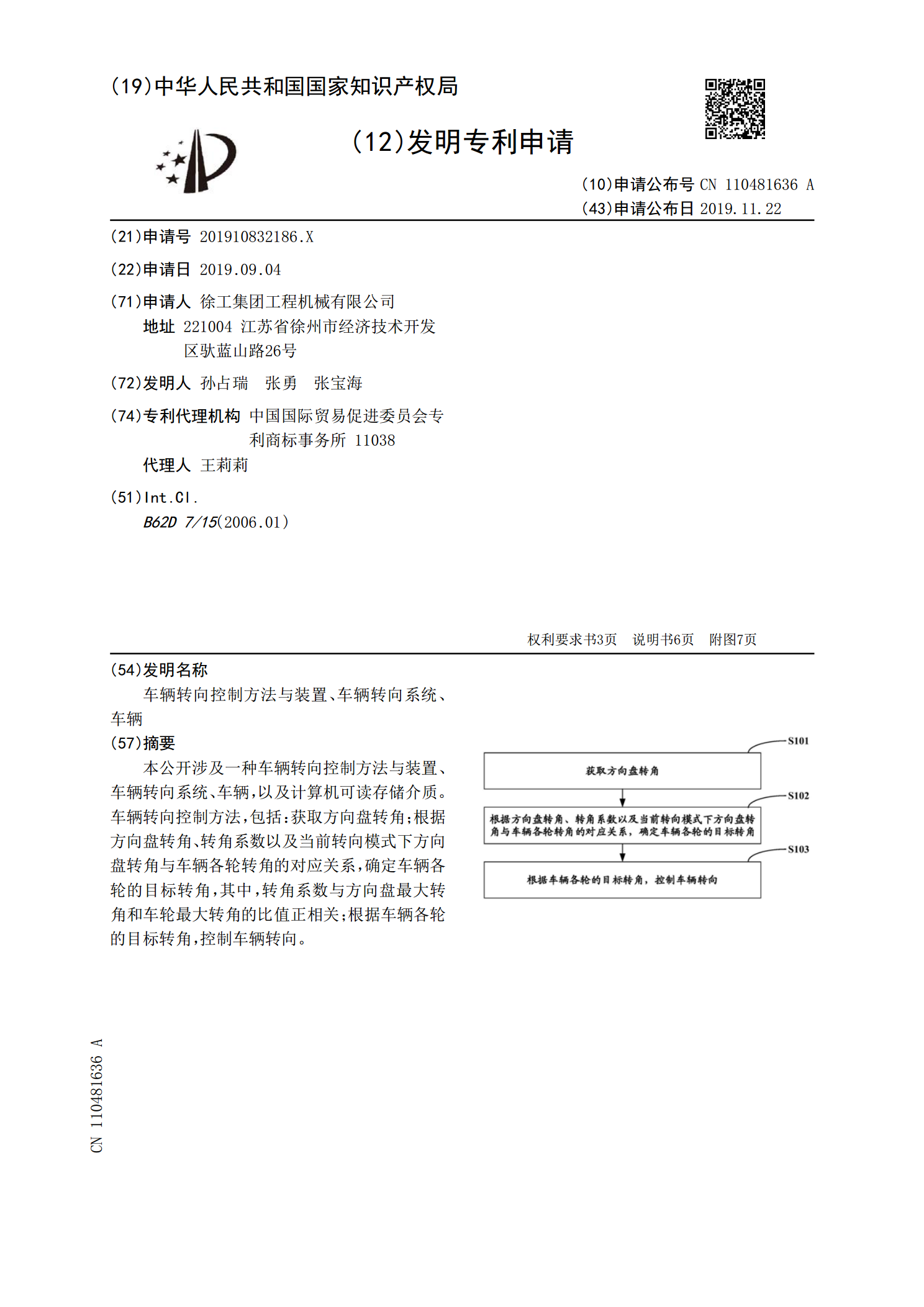
本公开涉及一种车辆转向控制方法与装置、车辆转向系统、车辆,以及计算机可读存储介质。车辆转向控制方法,包括:获取方向盘转角;根据方向盘转角、转角系数以及当前转向模式下方向盘转角与车辆各轮转角的对应关系,确定车辆各轮的目标转角,其中,转角系数与方向盘最大转角和车轮最大转角的比值正相关;根据车辆各轮的目标转角,控制车辆转向。
车辆转向控制方法和装置.pdf
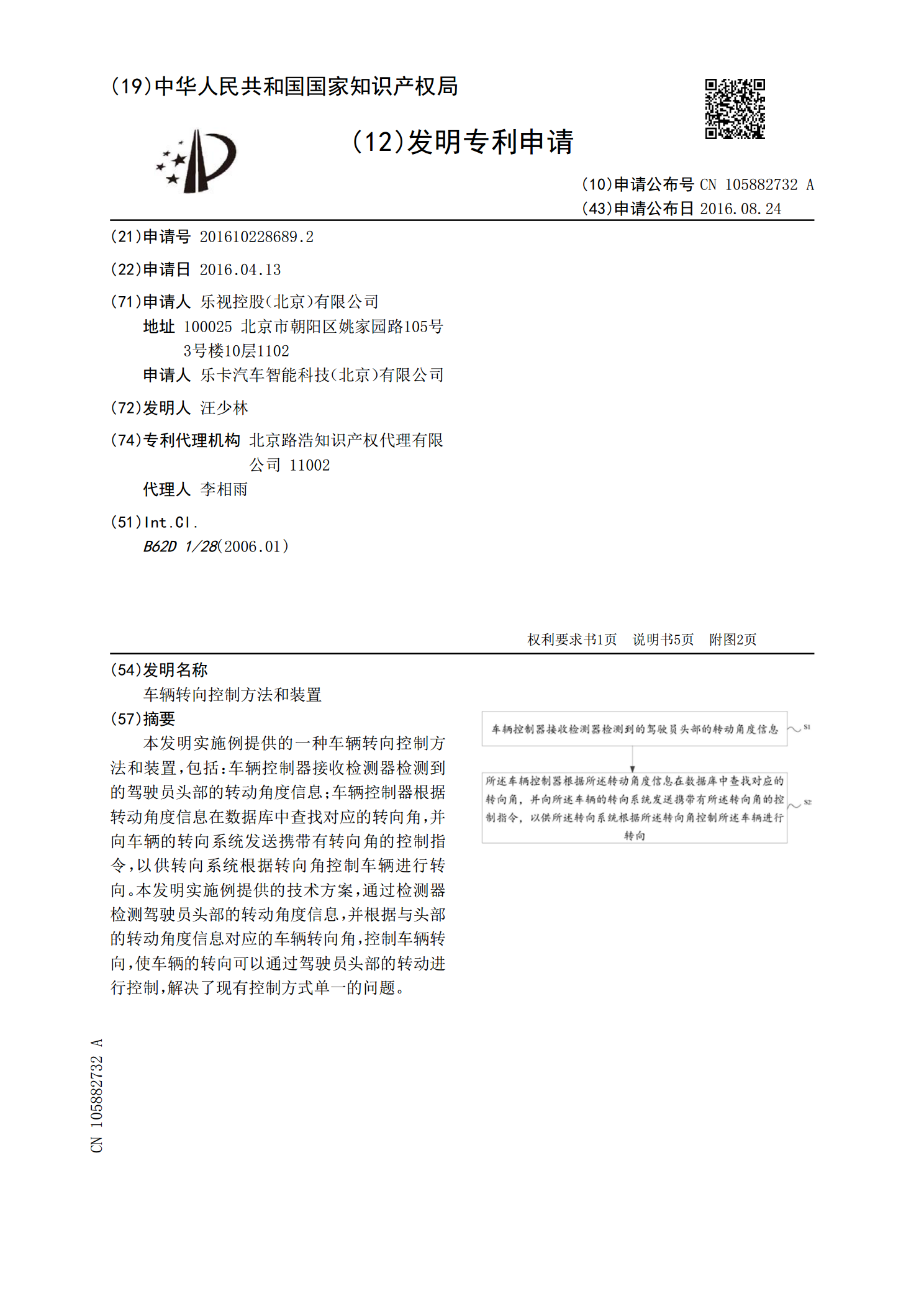
本发明实施例提供的一种车辆转向控制方法和装置,包括:车辆控制器接收检测器检测到的驾驶员头部的转动角度信息;车辆控制器根据转动角度信息在数据库中查找对应的转向角,并向车辆的转向系统发送携带有转向角的控制指令,以供转向系统根据转向角控制车辆进行转向。本发明实施例提供的技术方案,通过检测器检测驾驶员头部的转动角度信息,并根据与头部的转动角度信息对应的车辆转向角,控制车辆转向,使车辆的转向可以通过驾驶员头部的转动进行控制,解决了现有控制方式单一的问题。
车辆转向控制装置和方法.pdf
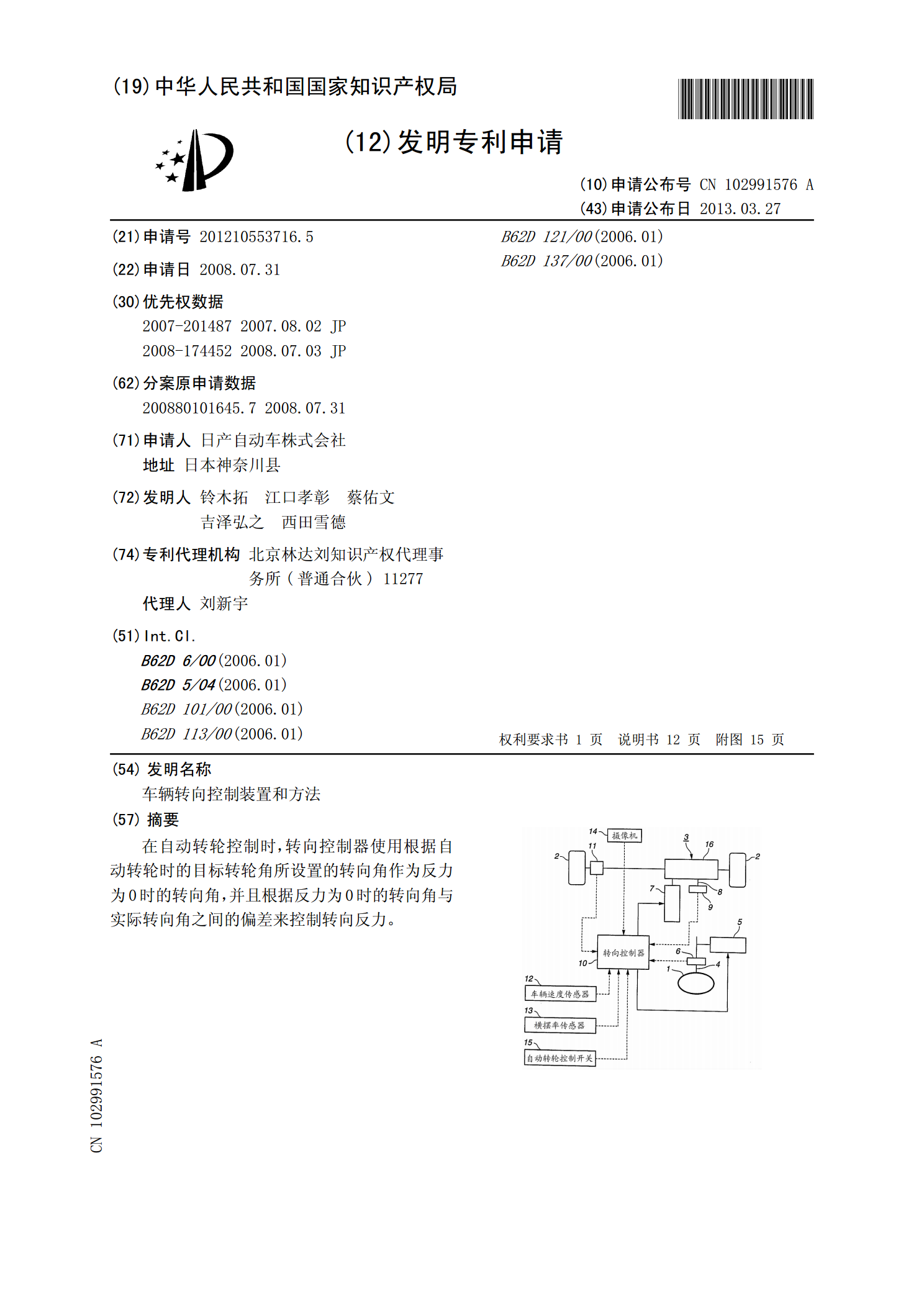
在自动转轮控制时,转向控制器使用根据自动转轮时的目标转轮角所设置的转向角作为反力为0时的转向角,并且根据反力为0时的转向角与实际转向角之间的偏差来控制转向反力。