
一种舵面偏转控制与测量系统及方法.pdf

努力****晓骞

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种舵面偏转控制与测量系统及方法.pdf
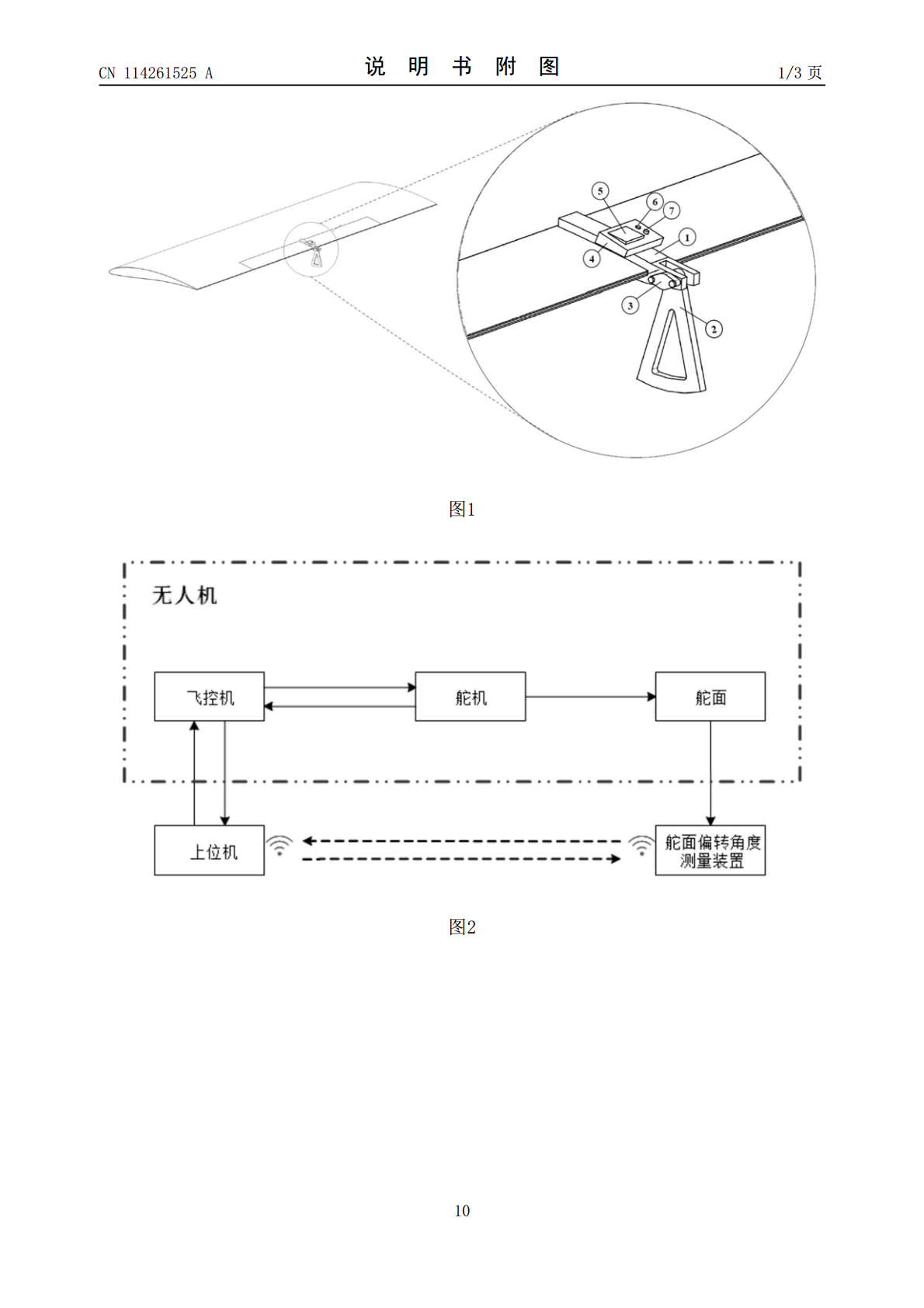
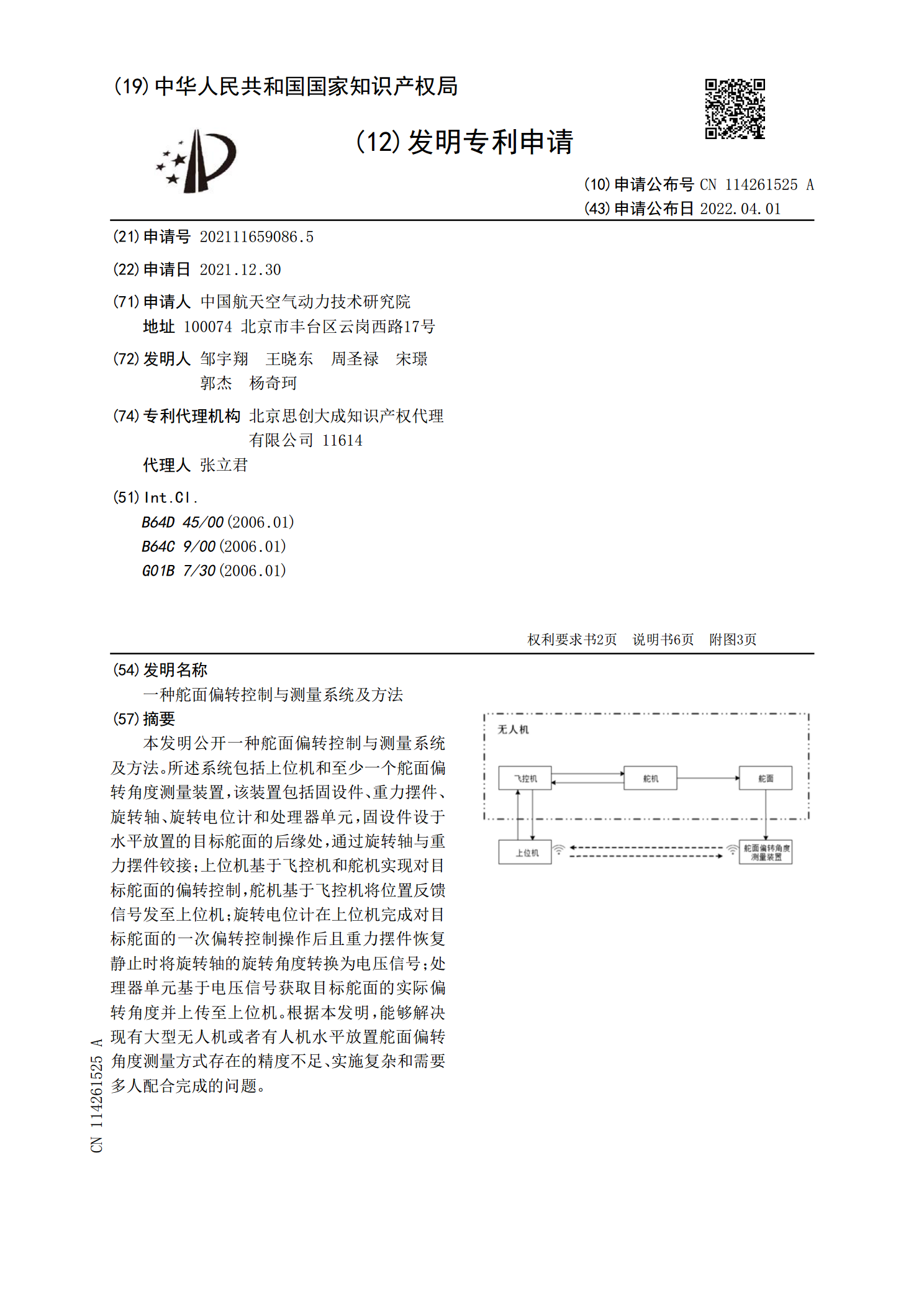
本发明公开一种舵面偏转控制与测量系统及方法。所述系统包括上位机和至少一个舵面偏转角度测量装置,该装置包括固设件、重力摆件、旋转轴、旋转电位计和处理器单元,固设件设于水平放置的目标舵面的后缘处,通过旋转轴与重力摆件铰接;上位机基于飞控机和舵机实现对目标舵面的偏转控制,舵机基于飞控机将位置反馈信号发至上位机;旋转电位计在上位机完成对目标舵面的一次偏转控制操作后且重力摆件恢复静止时将旋转轴的旋转角度转换为电压信号;处理器单元基于电压信号获取目标舵面的实际偏转角度并上传至上位机。根据本发明,能够解决现有大型无人机
基于飞行器舵面偏转的高精度动态测量方法.pdf
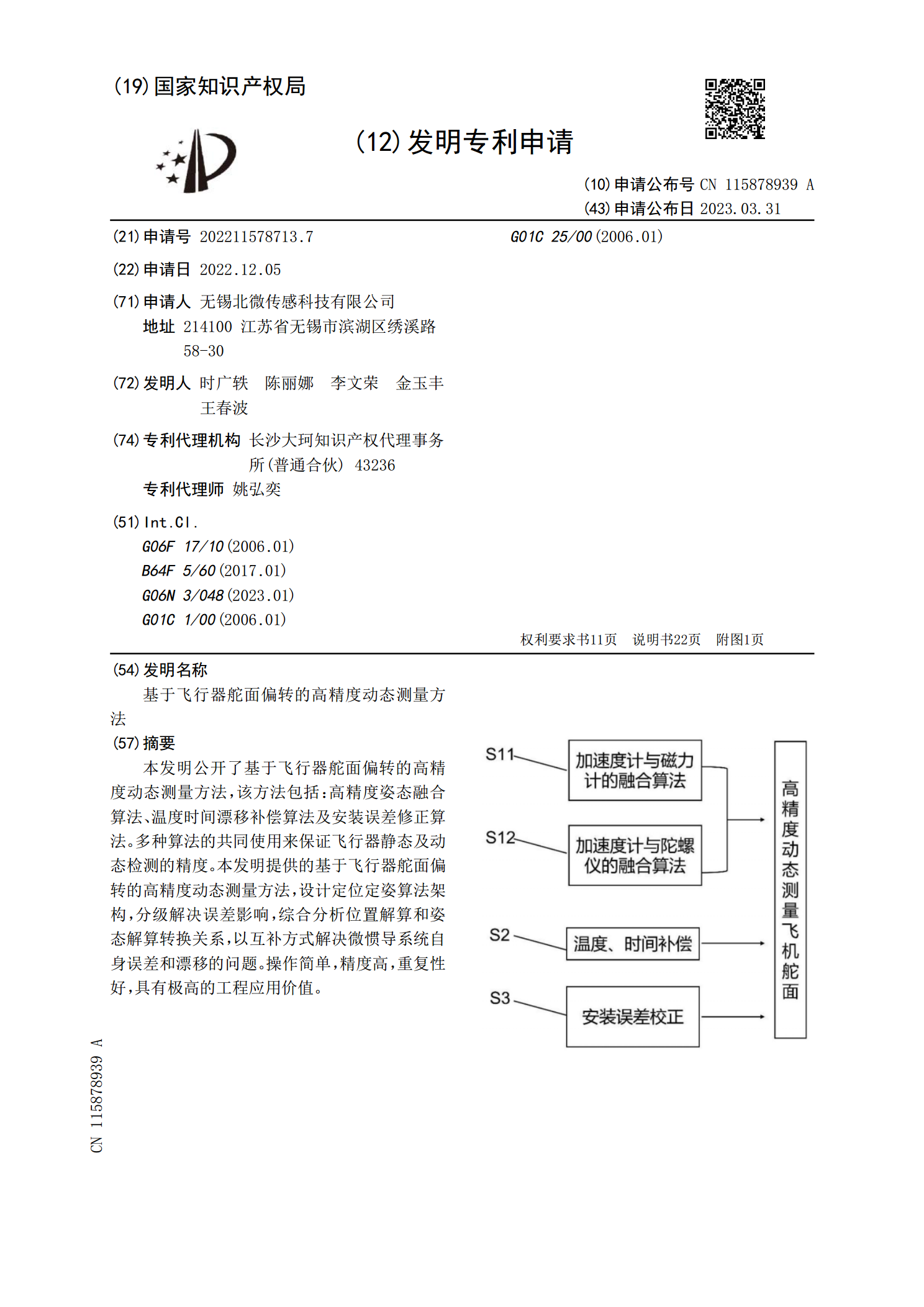
本发明公开了基于飞行器舵面偏转的高精度动态测量方法,该方法包括:高精度姿态融合算法、温度时间漂移补偿算法及安装误差修正算法。多种算法的共同使用来保证飞行器静态及动态检测的精度。本发明提供的基于飞行器舵面偏转的高精度动态测量方法,设计定位定姿算法架构,分级解决误差影响,综合分析位置解算和姿态解算转换关系,以互补方式解决微惯导系统自身误差和漂移的问题。操作简单,精度高,重复性好,具有极高的工程应用价值。
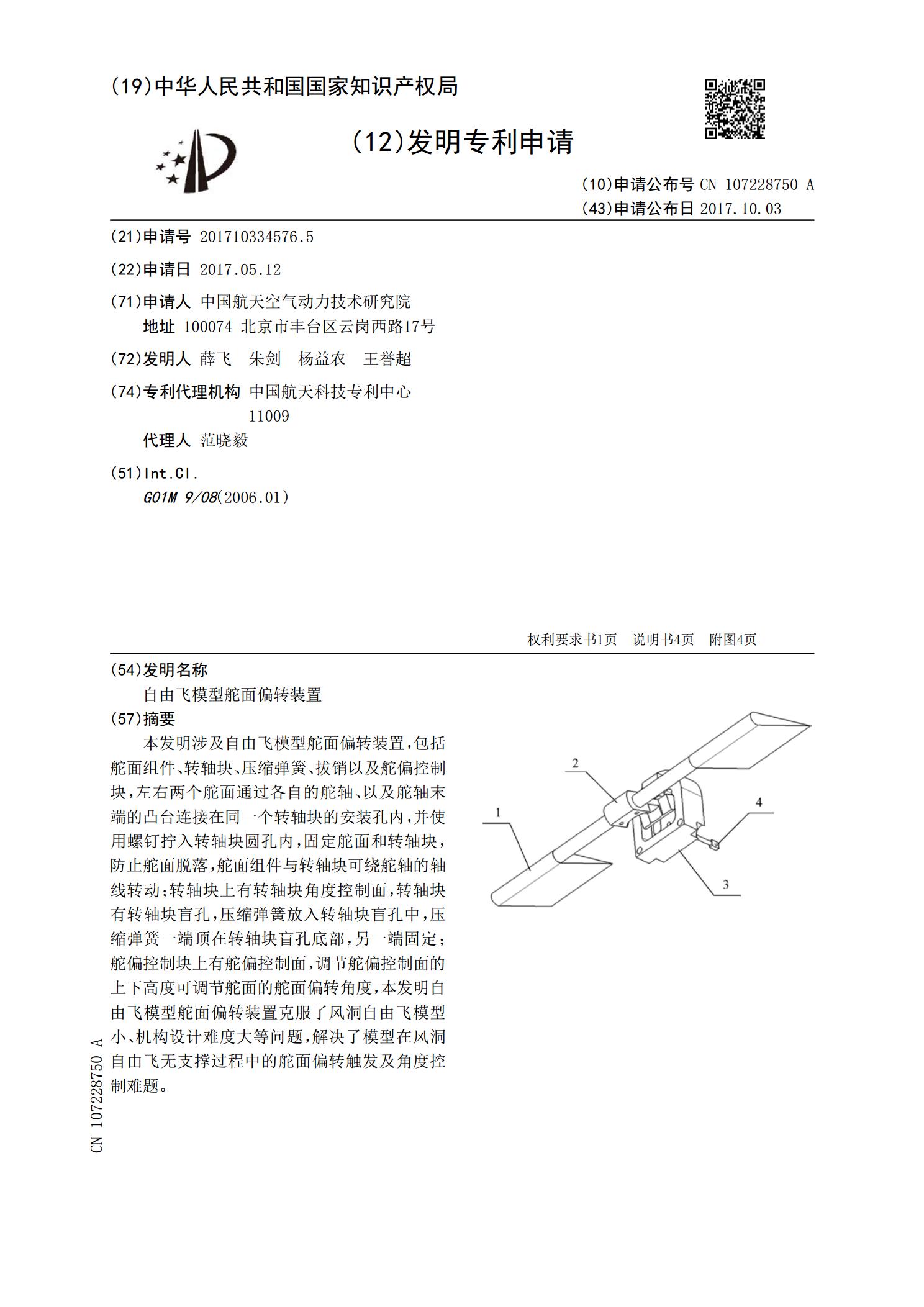
自由飞模型舵面偏转装置.pdf
本发明涉及自由飞模型舵面偏转装置,包括舵面组件、转轴块、压缩弹簧、拔销以及舵偏控制块,左右两个舵面通过各自的舵轴、以及舵轴末端的凸台连接在同一个转轴块的安装孔内,并使用螺钉拧入转轴块圆孔内,固定舵面和转轴块,防止舵面脱落,舵面组件与转轴块可绕舵轴的轴线转动;转轴块上有转轴块角度控制面,转轴块有转轴块盲孔,压缩弹簧放入转轴块盲孔中,压缩弹簧一端顶在转轴块盲孔底部,另一端固定;舵偏控制块上有舵偏控制面,调节舵偏控制面的上下高度可调节舵面的舵面偏转角度,本发明自由飞模型舵面偏转装置克服了风洞自由飞模型小、机构设
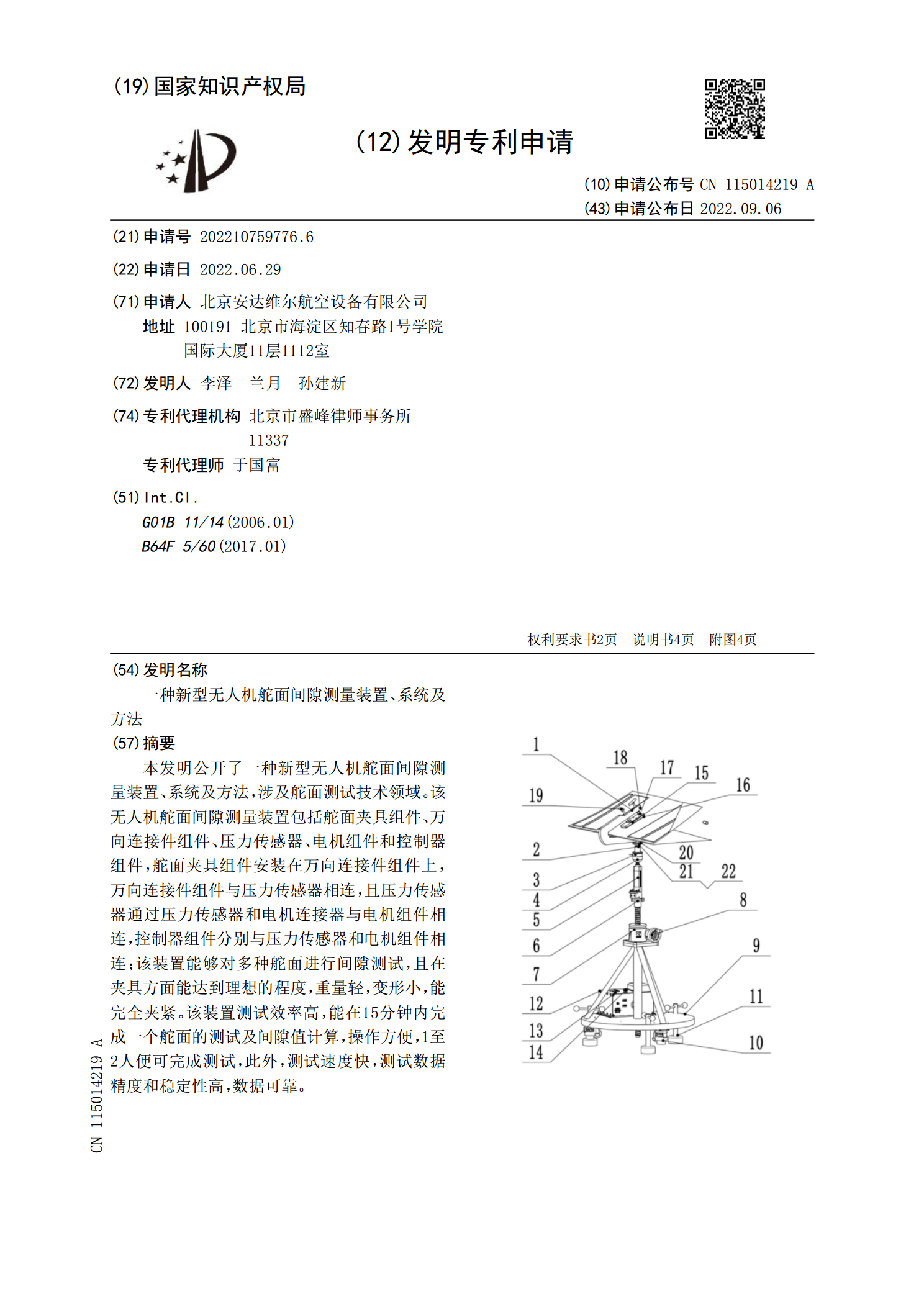
一种新型无人机舵面间隙测量装置、系统及方法.pdf
本发明公开了一种新型无人机舵面间隙测量装置、系统及方法,涉及舵面测试技术领域。该无人机舵面间隙测量装置包括舵面夹具组件、万向连接件组件、压力传感器、电机组件和控制器组件,舵面夹具组件安装在万向连接件组件上,万向连接件组件与压力传感器相连,且压力传感器通过压力传感器和电机连接器与电机组件相连,控制器组件分别与压力传感器和电机组件相连;该装置能够对多种舵面进行间隙测试,且在夹具方面能达到理想的程度,重量轻,变形小,能完全夹紧。该装置测试效率高,能在15分钟内完成一个舵面的测试及间隙值计算,操作方便,1至2人便
飞机舵面偏转角度的确定方法、装置、设备及介质.pdf
本发明实施例公开了一种飞机舵面偏转角度的确定方法、装置、设备及介质。该方法包括:实时获取安装在飞机舵面上的陀螺仪针对飞机飞行姿态的各组测量数据;根据测量时间相邻的每两组测量数据,分别确定飞机舵面偏转角度。在上述技术方案中,利用飞机舵面上的陀螺仪得到的测量数据即可确定飞机舵面偏转角度,在安装陀螺仪时无需要求陀螺仪的测量轴与飞机舵面转轴平行,陀螺仪的安装过程简单,通过陀螺仪测量数据确定的飞机舵面偏转角度的精确度也高。