
基于飞行器舵面偏转的高精度动态测量方法.pdf

飞飙****ng


1/10

2/10
3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共35页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于飞行器舵面偏转的高精度动态测量方法.pdf
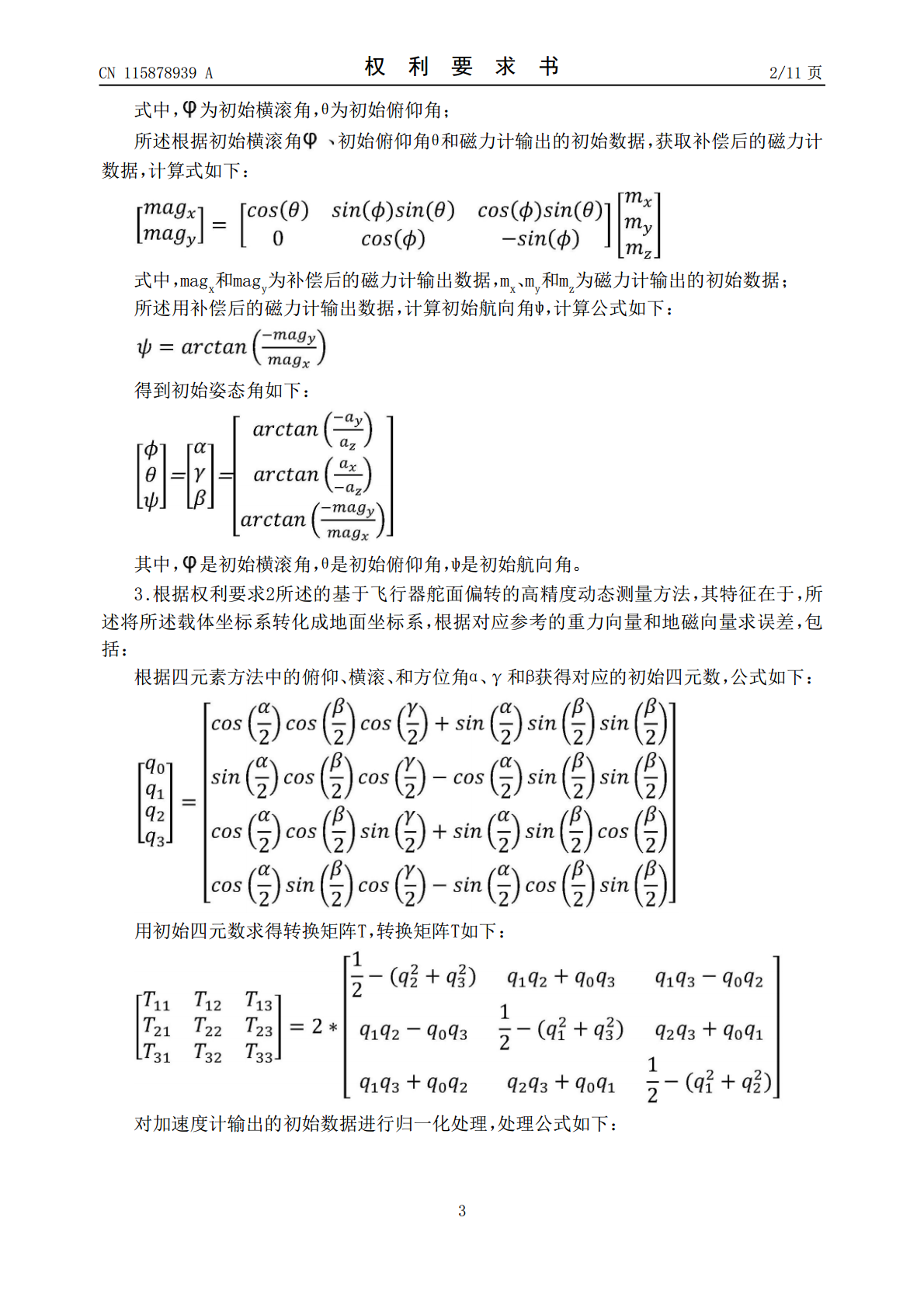
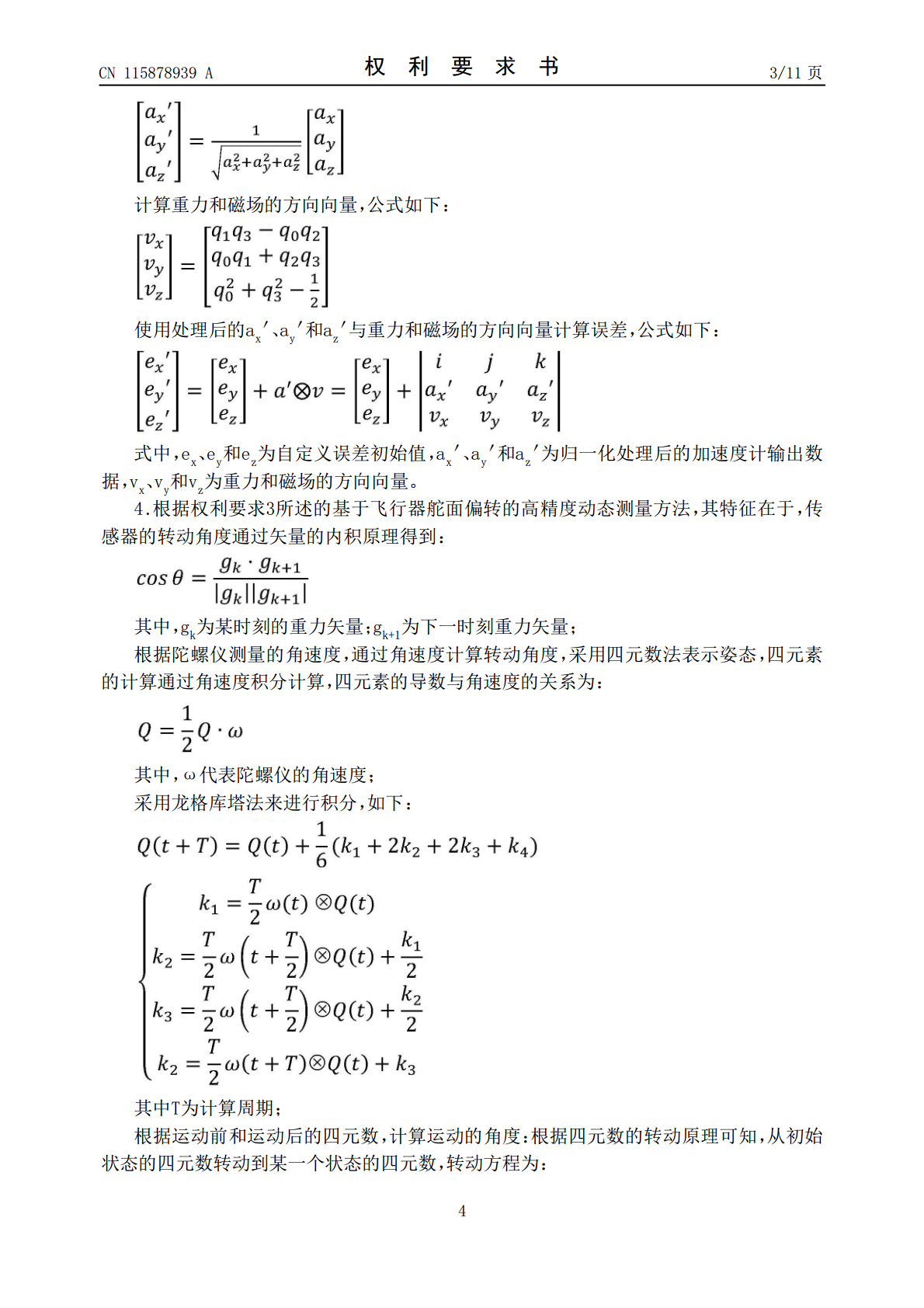
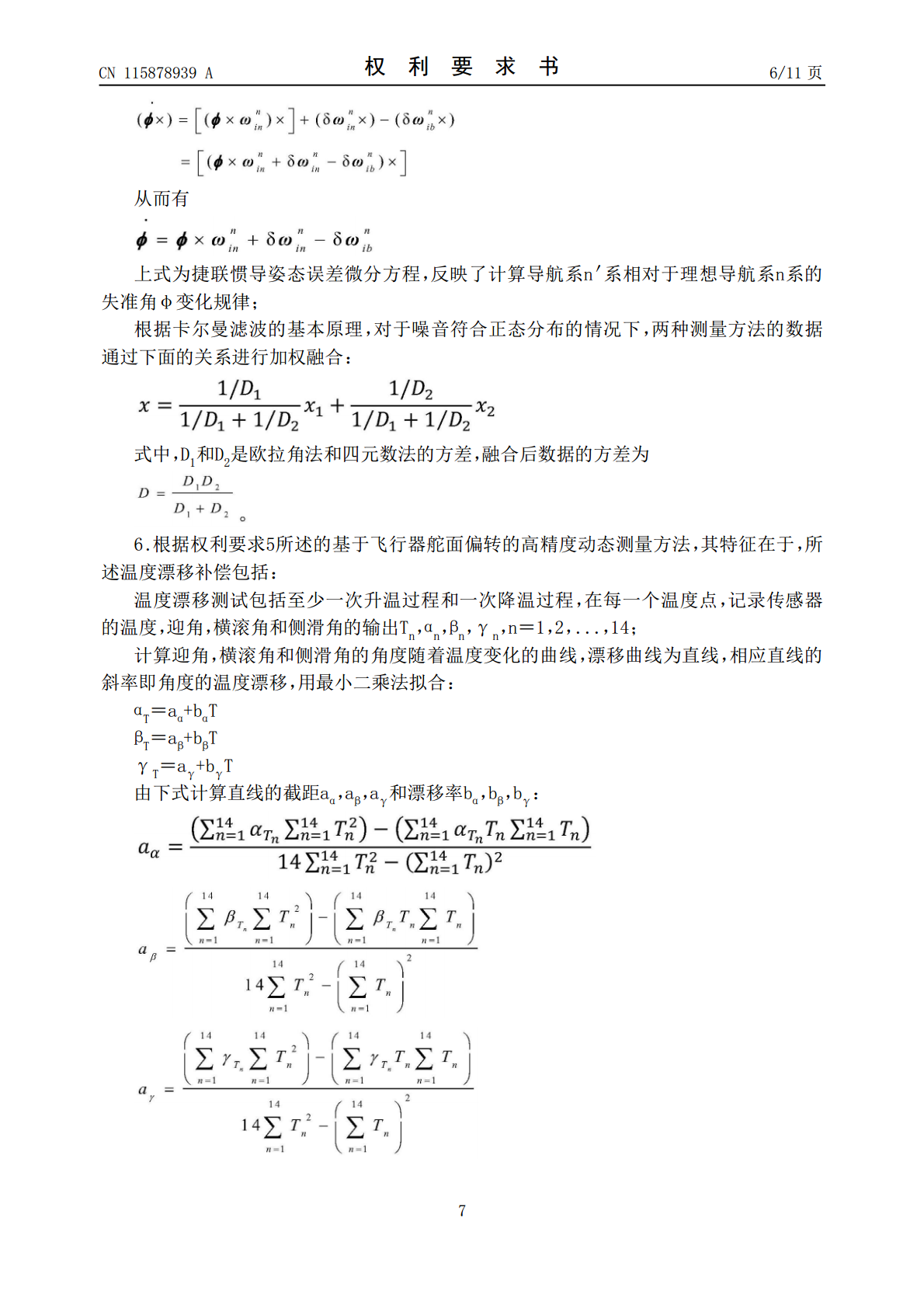
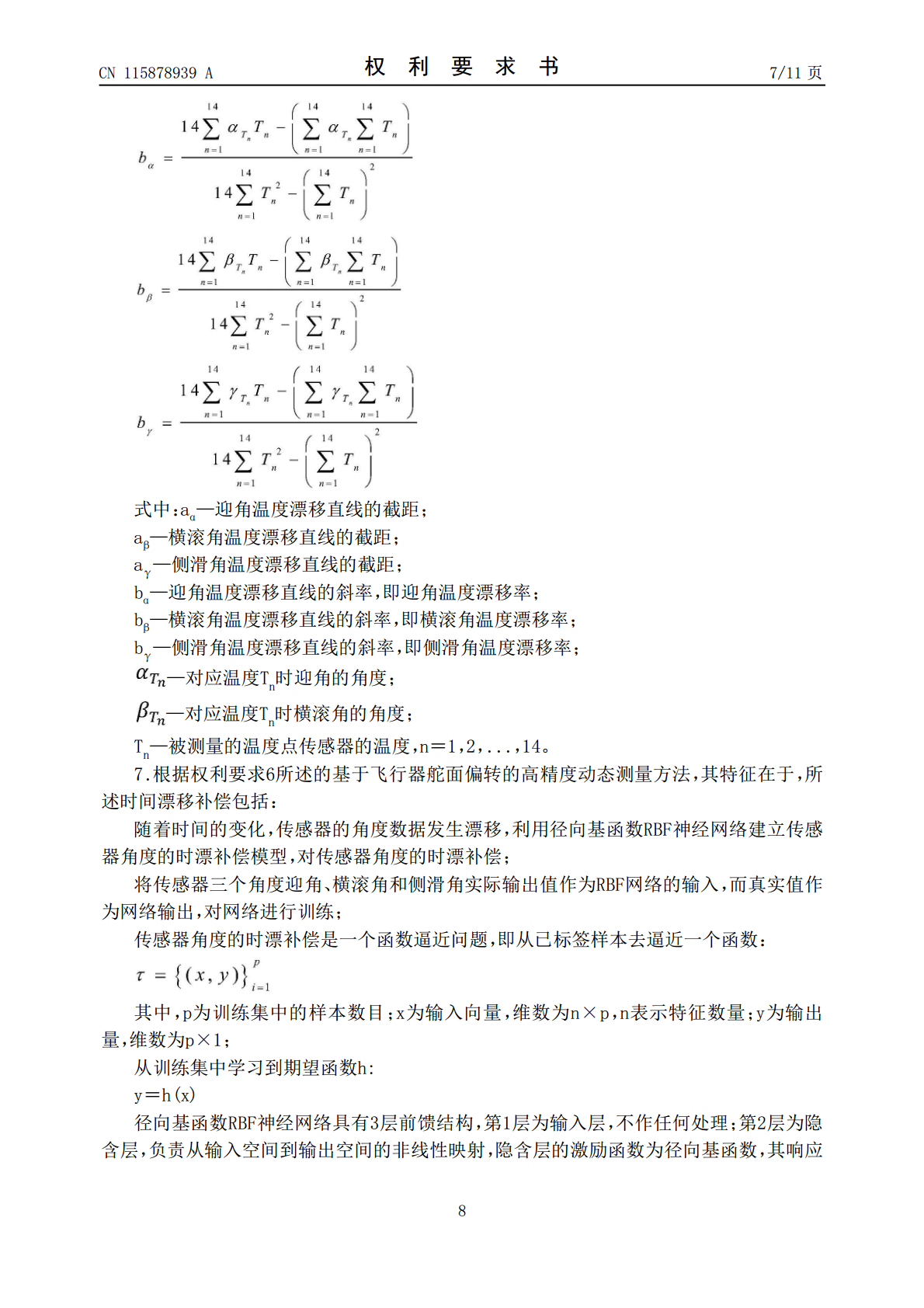
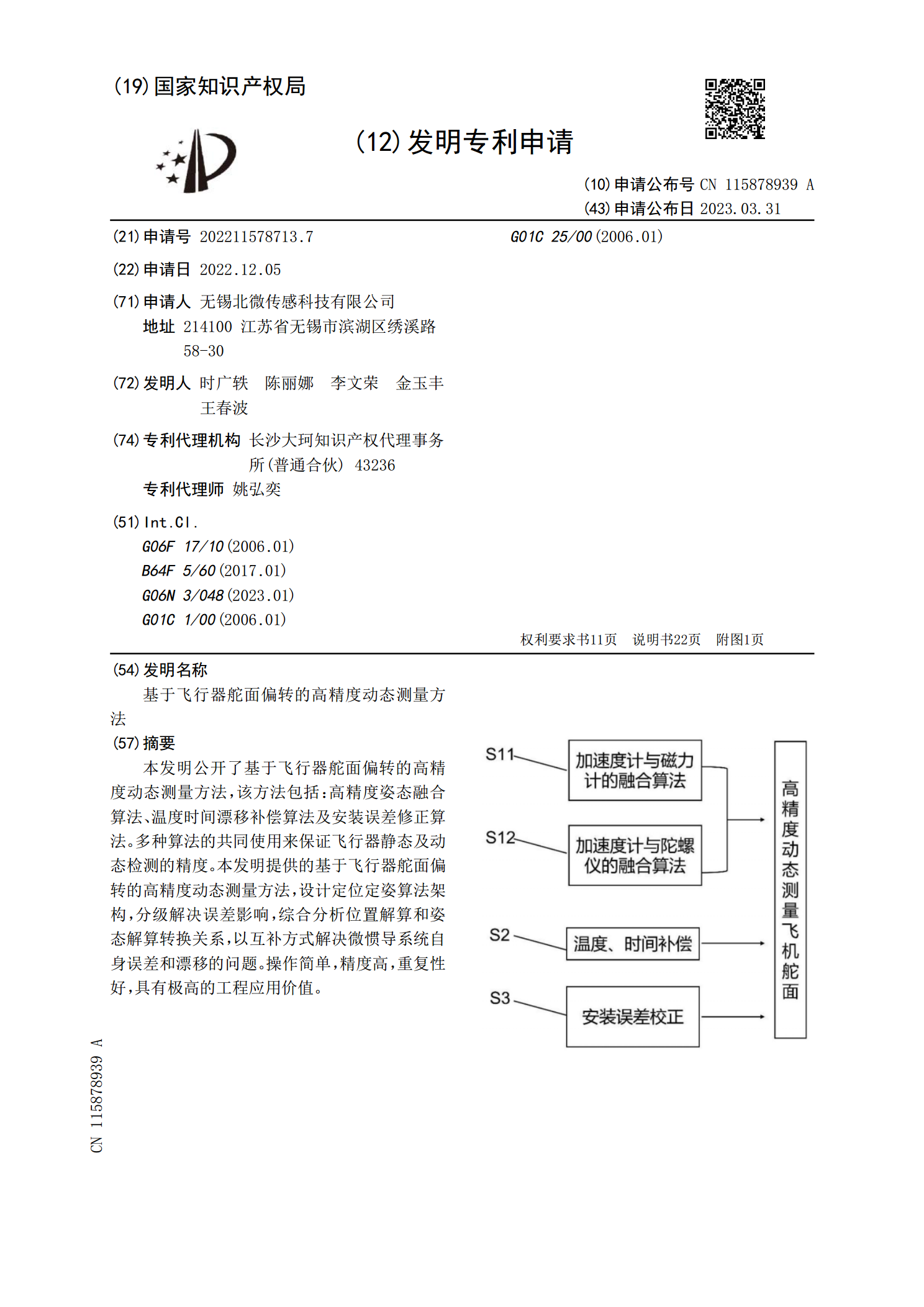
本发明公开了基于飞行器舵面偏转的高精度动态测量方法,该方法包括:高精度姿态融合算法、温度时间漂移补偿算法及安装误差修正算法。多种算法的共同使用来保证飞行器静态及动态检测的精度。本发明提供的基于飞行器舵面偏转的高精度动态测量方法,设计定位定姿算法架构,分级解决误差影响,综合分析位置解算和姿态解算转换关系,以互补方式解决微惯导系统自身误差和漂移的问题。操作简单,精度高,重复性好,具有极高的工程应用价值。

基于相控阵天线的动态飞行器间高精度视线角测量方法.docx
基于相控阵天线的动态飞行器间高精度视线角测量方法基于相控阵天线的动态飞行器间高精度视线角测量方法摘要:随着航空技术的不断发展,无人机的应用场景越来越广泛,动态飞行器间的高精度视线角测量成为当前研究的热点之一。本论文针对这一问题,提出了一种基于相控阵天线的方法,以实现动态飞行器间的高精度视线角测量。首先,介绍了相控阵天线的基本原理和工作方式。然后,详细描述了基于相控阵天线的动态飞行器间高精度视线角测量方法的实现过程和步骤。最后,通过实验和仿真验证了该方法的可行性和准确性。实验结果表明,该方法能够实现飞行器间
自由飞模型舵面偏转装置.pdf
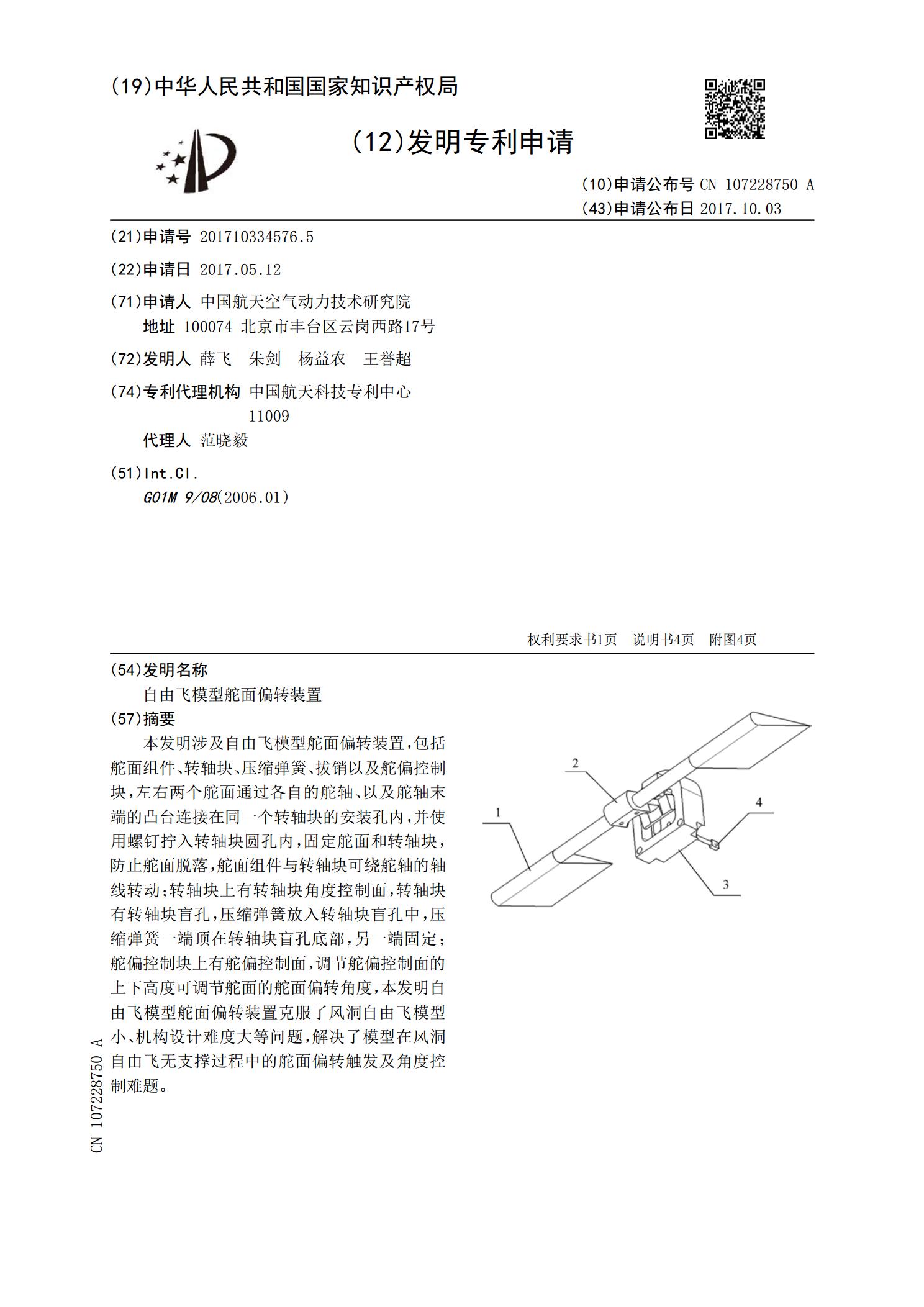
本发明涉及自由飞模型舵面偏转装置,包括舵面组件、转轴块、压缩弹簧、拔销以及舵偏控制块,左右两个舵面通过各自的舵轴、以及舵轴末端的凸台连接在同一个转轴块的安装孔内,并使用螺钉拧入转轴块圆孔内,固定舵面和转轴块,防止舵面脱落,舵面组件与转轴块可绕舵轴的轴线转动;转轴块上有转轴块角度控制面,转轴块有转轴块盲孔,压缩弹簧放入转轴块盲孔中,压缩弹簧一端顶在转轴块盲孔底部,另一端固定;舵偏控制块上有舵偏控制面,调节舵偏控制面的上下高度可调节舵面的舵面偏转角度,本发明自由飞模型舵面偏转装置克服了风洞自由飞模型小、机构设

舵面偏转对机翼RCS影响仿真与分析.docx
舵面偏转对机翼RCS影响仿真与分析舵面偏转对机翼RCS影响仿真与分析摘要:随着雷达技术的发展与应用,雷达反射截面(RCS)的研究成为了航空航天领域中的重要问题。舵面偏转对机翼RCS的影响十分复杂,需要进行仿真与分析来研究其具体影响机制。本文以舵面偏转对机翼RCS的影响为研究课题,通过建立仿真模型和分析数据,深入分析舵面偏转对机翼RCS的影响特点和影响机制,为航空航天设计与优化提供理论参考。1.引言舵面偏转对机翼RCS的影响是航空航天研究中的一项重要课题。机翼是飞机的主要气动设备,其表面的边缘和尖端通常是雷
一种基于舵面调节飞行姿态的飞行器.pdf
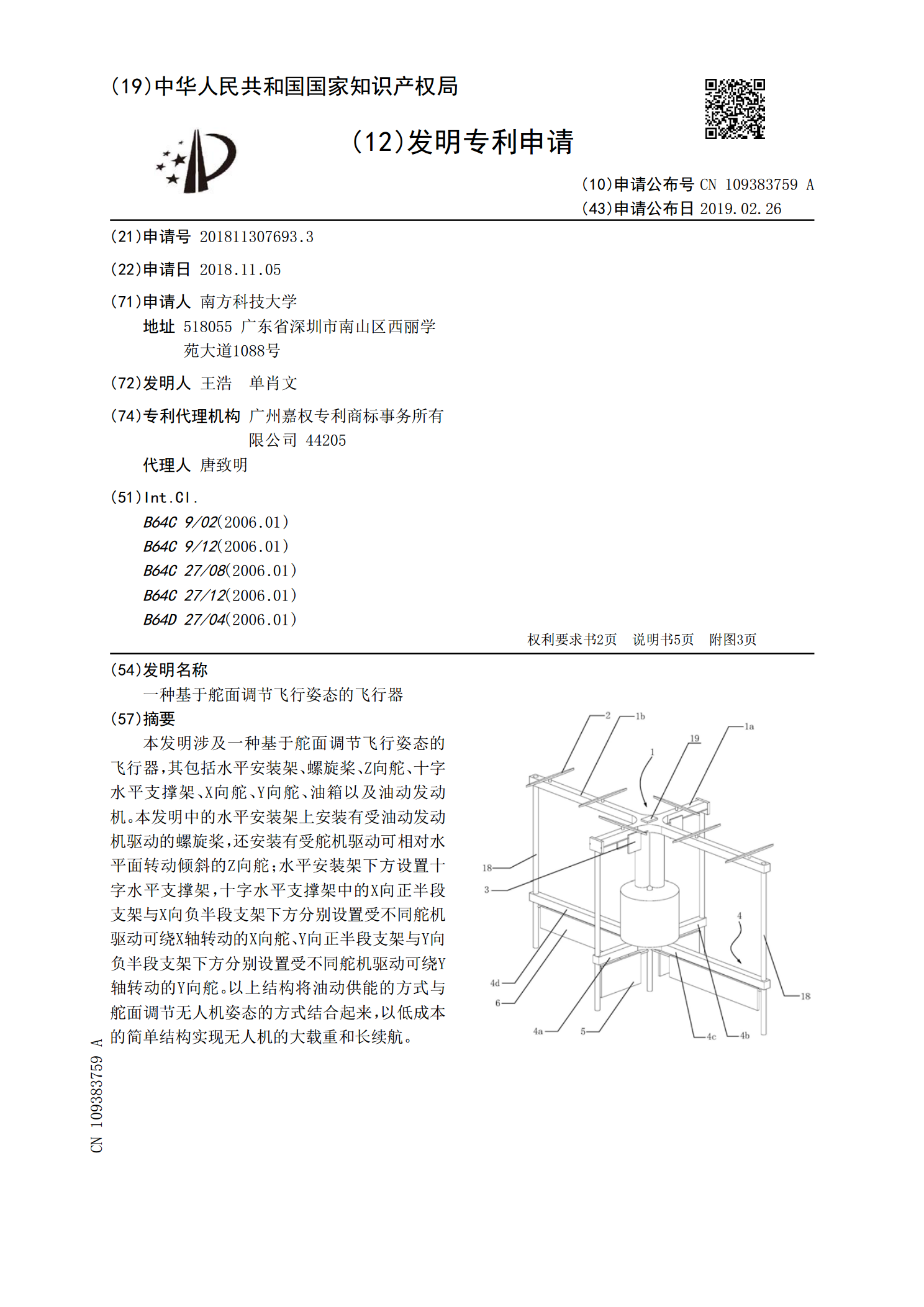
本发明涉及一种基于舵面调节飞行姿态的飞行器,其包括水平安装架、螺旋桨、Z向舵、十字水平支撑架、X向舵、Y向舵、油箱以及油动发动机。本发明中的水平安装架上安装有受油动发动机驱动的螺旋桨,还安装有受舵机驱动可相对水平面转动倾斜的Z向舵;水平安装架下方设置十字水平支撑架,十字水平支撑架中的X向正半段支架与X向负半段支架下方分别设置受不同舵机驱动可绕X轴转动的X向舵、Y向正半段支架与Y向负半段支架下方分别设置受不同舵机驱动可绕Y轴转动的Y向舵。以上结构将油动供能的方式与舵面调节无人机姿态的方式结合起来,以低成本的