
行驶辅助方法及行驶辅助装置.pdf

雨巷****彦峰

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
行驶辅助方法及行驶辅助装置.pdf
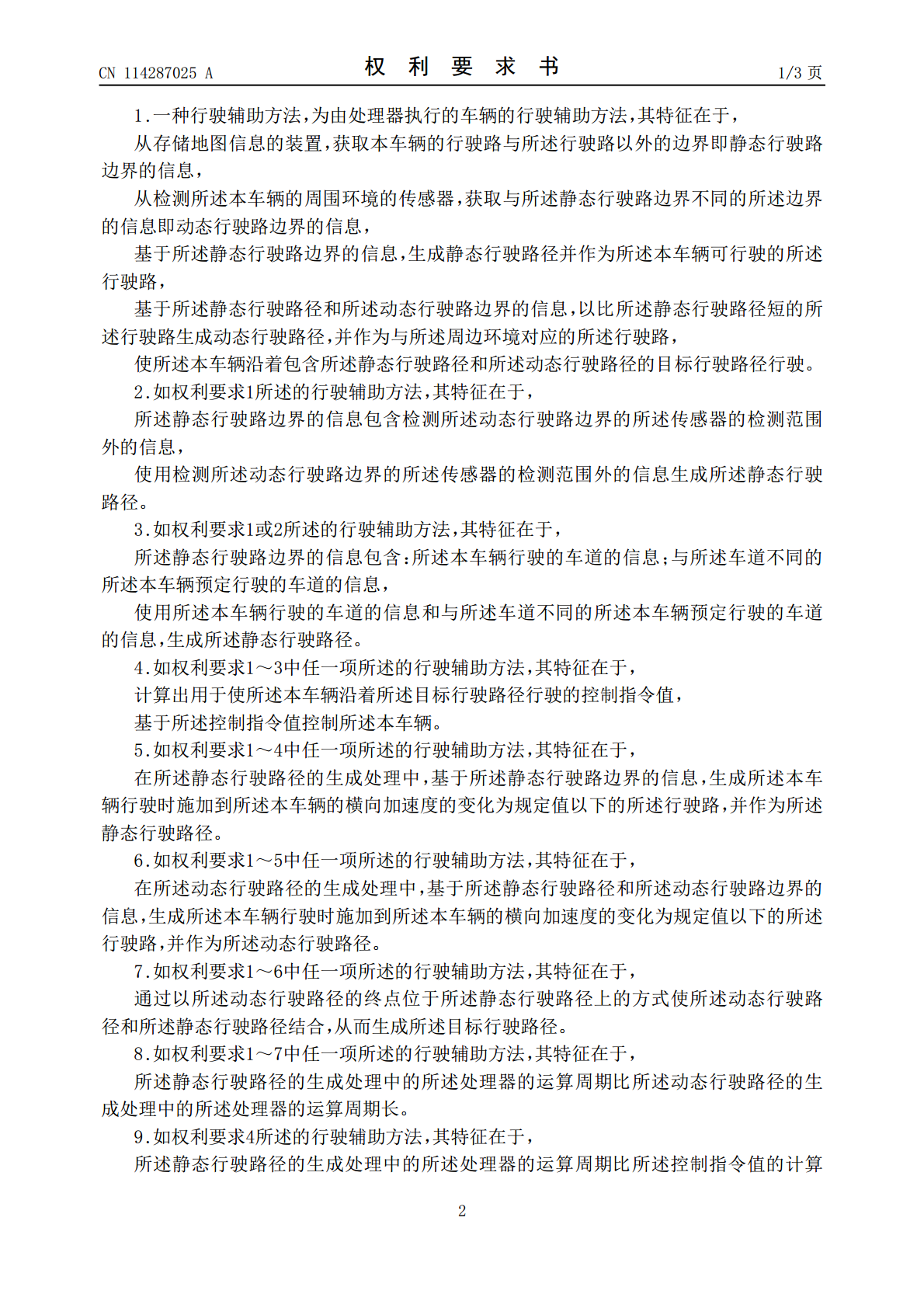
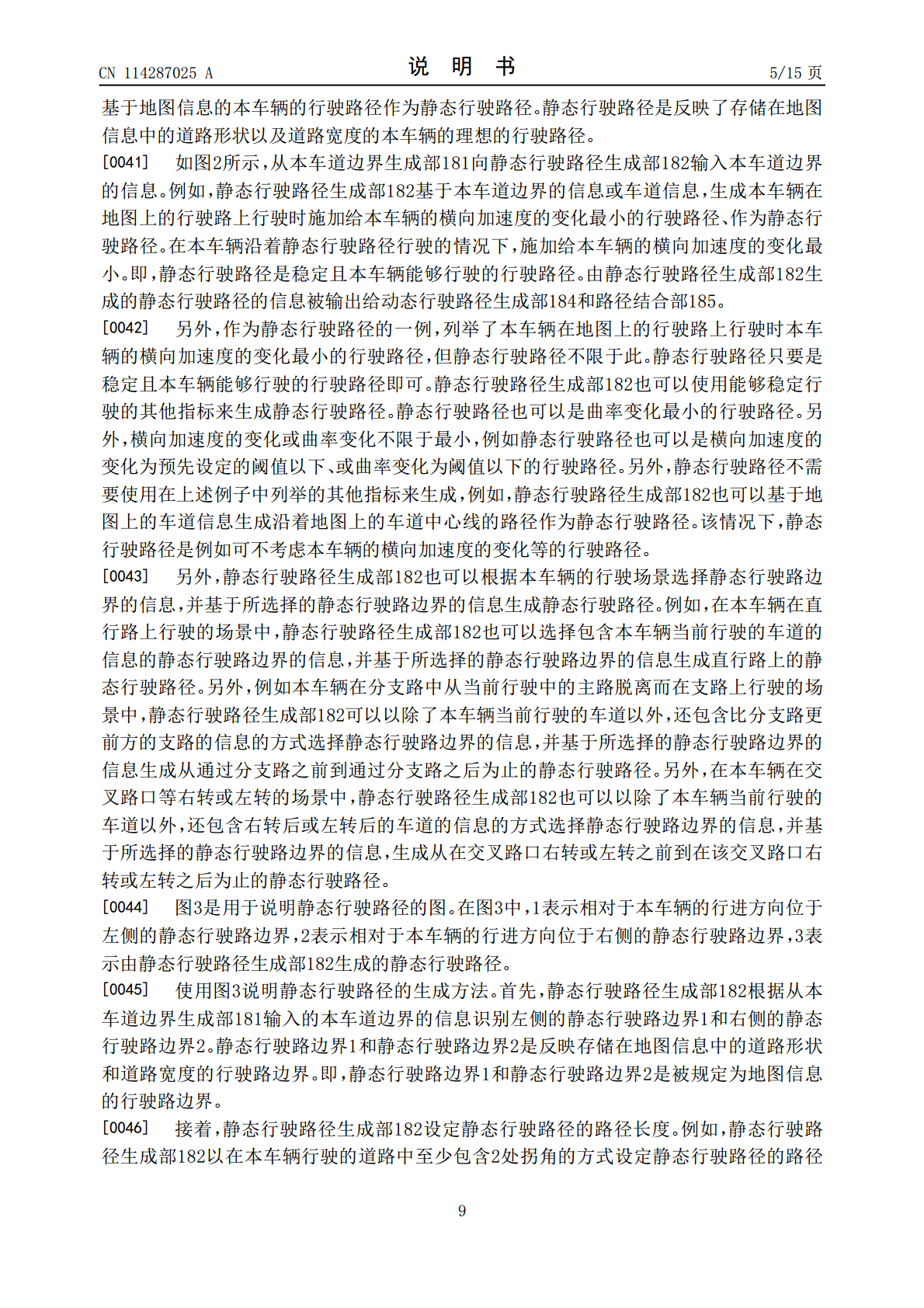
一种由处理器(180)执行的车辆的行驶辅助方法,从存储地图信息的装置(120)获取本车辆的行驶路与该行驶路以外的边界即静态行驶路边界的信息,从检测本车辆的周边环境的传感器(140)获取与静态行驶路边界不同的边界的信息即动态行驶路边界的信息,基于静态行驶路边界的信息生成静态行驶路径作为本车辆可行驶的行驶路,基于静态行驶路径和动态行驶路边界的信息,以比静态行驶路径短的行驶路生成动态行驶路径作为与周边环境对应的行驶路,使本车辆沿着包含静态行驶路径和动态行驶路径的目标行驶路径行驶。

车辆行驶辅助方法及装置、车辆.pdf
本发明提供了一种车辆行驶辅助方法及装置、车辆,上述方法包括:获取车辆前方的行车视频画面;对所述车辆前方的行车视频画面进行图像识别,识别出所述车辆前方的行车视频画面中各个事物的轮廓线;根据所述车辆前方的行车视频画面中各个事物的轮廓线生成辅助行驶视频,并通过投射方式将所述辅助行驶视频显示在车辆的前挡风玻璃上。本发明提供的技术方案可以辅助用户更准确的判断如何车辆驾驶,抬头显示的方式也为用户带来了很大的方便。
车辆的行驶辅助装置.pdf
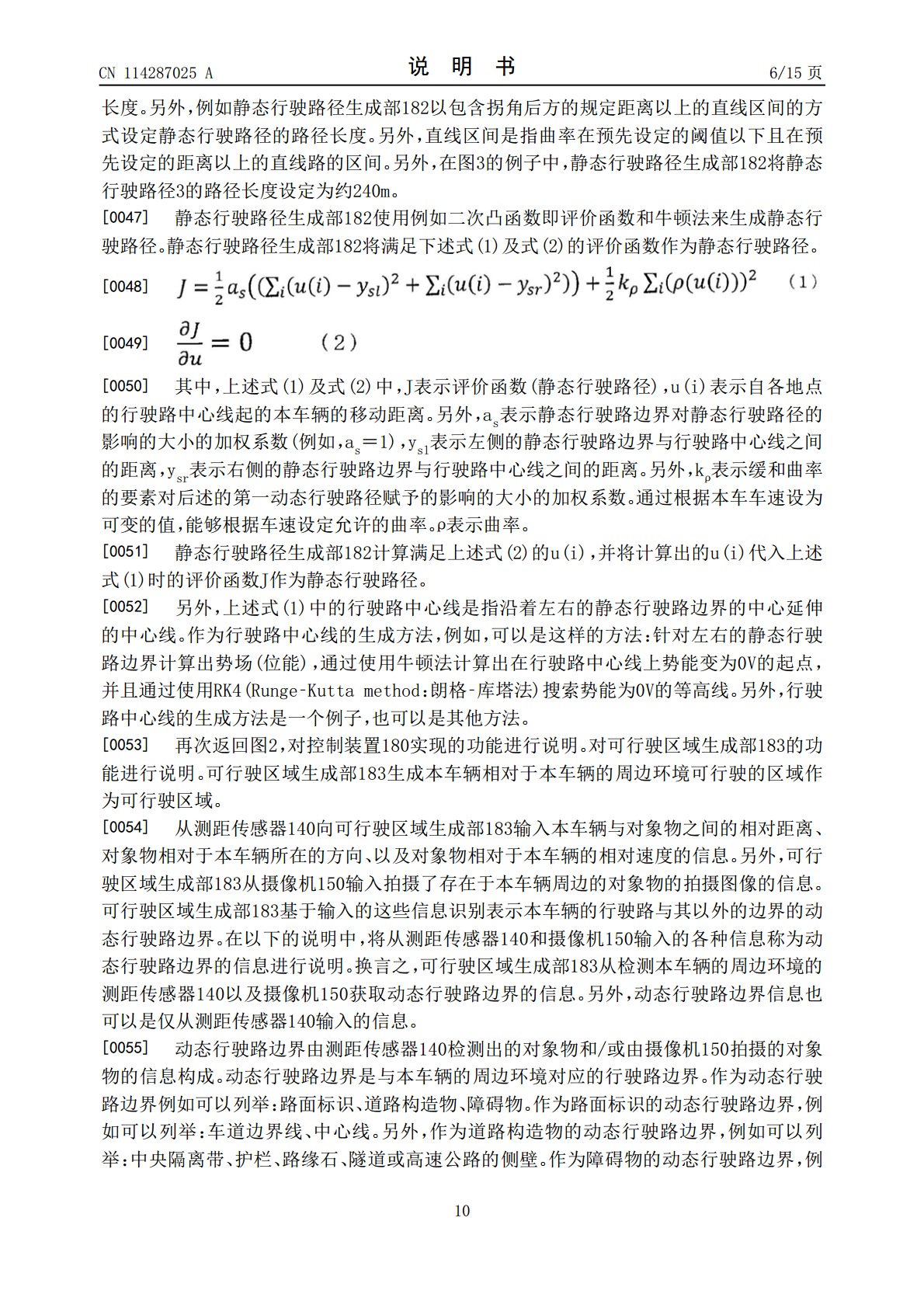
本发明涉及车辆的行驶辅助装置。行驶辅助装置(30)具备:创建部(31),根据总行驶距离来创建行驶曲线;以及输出部(35),将与目标状态量对应的操作量输出至驱动装置(10)以及制动装置(20)中的至少一个装置,该目标状态量是由行驶曲线指示的状态量的目标值。在车辆通过基于操作量的上述至少一个装置的驱动而行驶的状态下,在状态量的实际值与目标状态量的差值为判定差值以上时,创建部(31)重新创建行驶曲线,以使得车辆的加速度不超过规定的限制值。

车辆的行驶辅助装置.pdf
本发明提供一种在左轮与右轮之间产生制动力差而使车辆进行偏航运动时,能够抑制车辆减速度与要求减速度的偏差的车辆的行驶辅助装置。车辆的行驶辅助装置将目标偏航力矩(MRq)中的一半分配至内侧轮,将目标偏航力矩(MRq)中的剩余分配至外侧轮(步骤S64),分配至内侧轮的目标偏航力矩(MRq)越大,则越增多内侧轮的制动力的增大量(BPI),分配外侧轮的目标偏航力矩(MRq)越大,则越加大该外侧轮的制动力的减少量(BPO)(步骤S65),与内侧轮的制动力的增大量(BPI)相应地使内侧轮的制动力增大,与外侧轮的制动力的
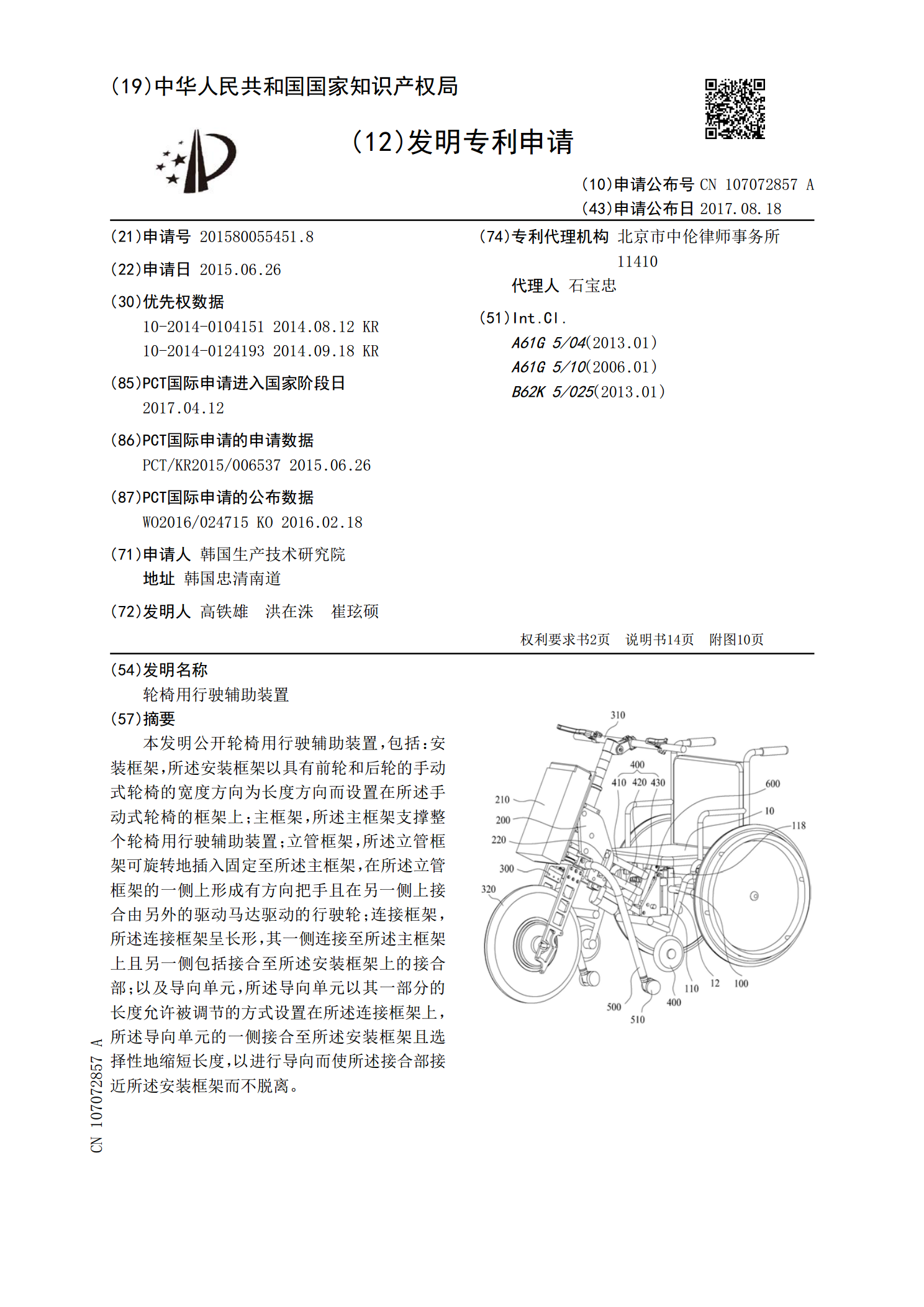
轮椅用行驶辅助装置.pdf
本发明公开轮椅用行驶辅助装置,包括:安装框架,所述安装框架以具有前轮和后轮的手动式轮椅的宽度方向为长度方向而设置在所述手动式轮椅的框架上;主框架,所述主框架支撑整个轮椅用行驶辅助装置;立管框架,所述立管框架可旋转地插入固定至所述主框架,在所述立管框架的一侧上形成有方向把手且在另一侧上接合由另外的驱动马达驱动的行驶轮;连接框架,所述连接框架呈长形,其一侧连接至所述主框架上且另一侧包括接合至所述安装框架上的接合部;以及导向单元,所述导向单元以其一部分的长度允许被调节的方式设置在所述连接框架上,所述导向单元的一