
一种车辆控制方法、系统和车辆.pdf

子安****吖吖


1/10

2/10
3/10

4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车辆控制方法、系统和车辆.pdf
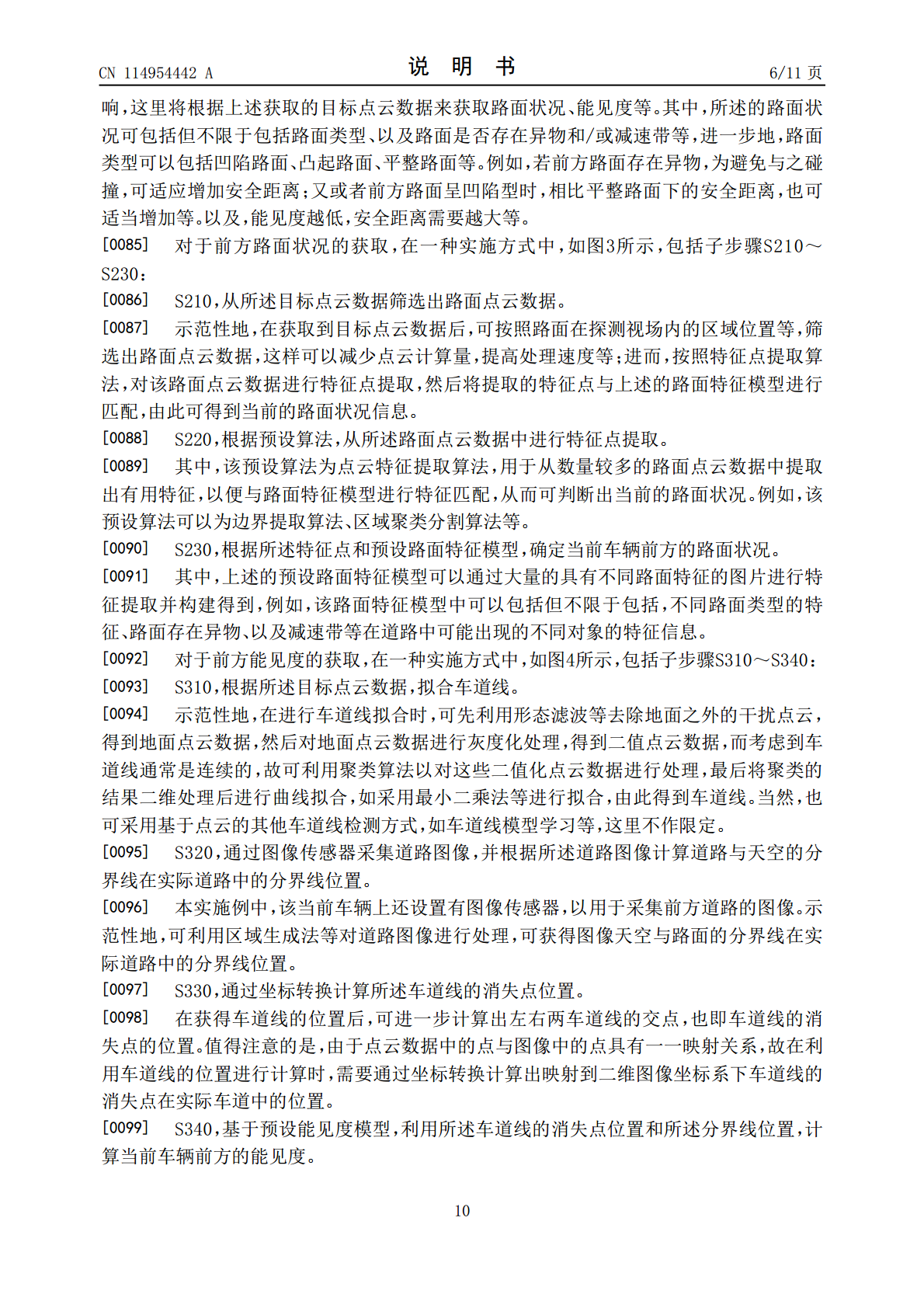
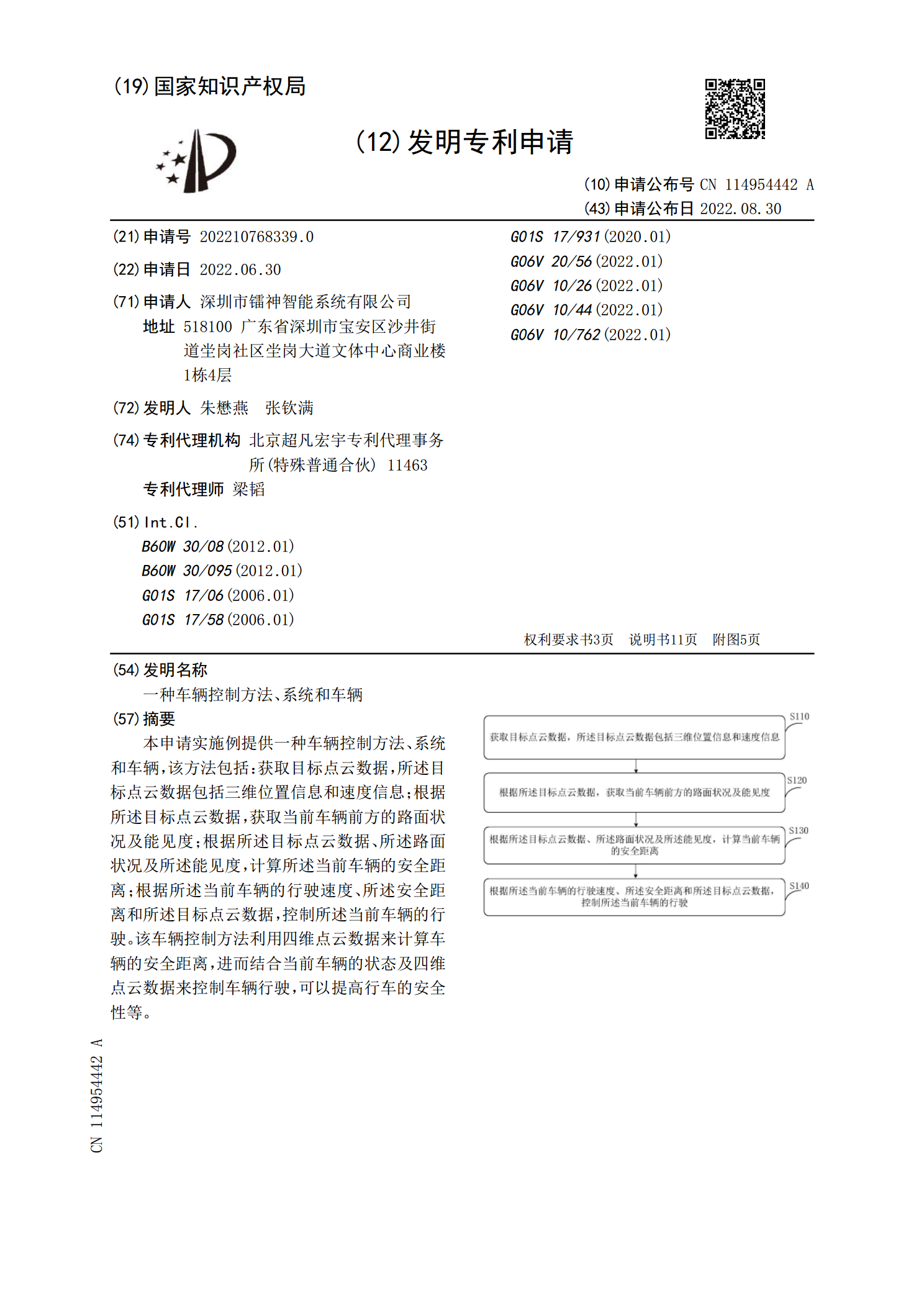
本申请实施例提供一种车辆控制方法、系统和车辆,该方法包括:获取目标点云数据,所述目标点云数据包括三维位置信息和速度信息;根据所述目标点云数据,获取当前车辆前方的路面状况及能见度;根据所述目标点云数据、所述路面状况及所述能见度,计算所述当前车辆的安全距离;根据所述当前车辆的行驶速度、所述安全距离和所述目标点云数据,控制所述当前车辆的行驶。该车辆控制方法利用四维点云数据来计算车辆的安全距离,进而结合当前车辆的状态及四维点云数据来控制车辆行驶,可以提高行车的安全性等。

车辆控制装置、车辆控制系统和车辆控制方法.pdf
本发明的车辆控制装置包括:加法单元,将根据由BLSD请求液压计算处理单元求得的BLSD请求液压对低μ路面侧的车轮给予的制动扭矩造成的损耗的驱动扭矩(损耗补偿量驱动扭矩),相加了由驾驶员请求扭矩计算处理单元求得的驾驶员请求扭矩的补偿后驾驶员请求扭矩输出到电机。

一种车辆影像融合显示系统、控制方法和车辆.pdf
本发明公开了一种车辆影像融合显示系统、控制方法和车辆,该系统包括:A柱摄像头、A柱控制器、外后视镜摄像头、外后视镜控制器和显示屏,所述A柱摄像头、所述A柱控制器和所述显示屏顺次连接,所述外后视镜摄像头、外后视镜控制器和显示屏顺次连接;所述A柱摄像头获取A柱盲区影像;所述A柱摄像头通过所述A柱控制器将所述A柱盲区影像发送至所述显示屏;所述外后视镜摄像头获取外部影像;所述外后视镜摄像头通过所述外后视镜控制器将所述外部影像发送至所述显示屏。上述方案通过A柱摄像头和外后视镜摄像头分别获取A柱盲区影像和外部影像,并
车辆控制方法、单元及车辆控制系统和车辆.pdf
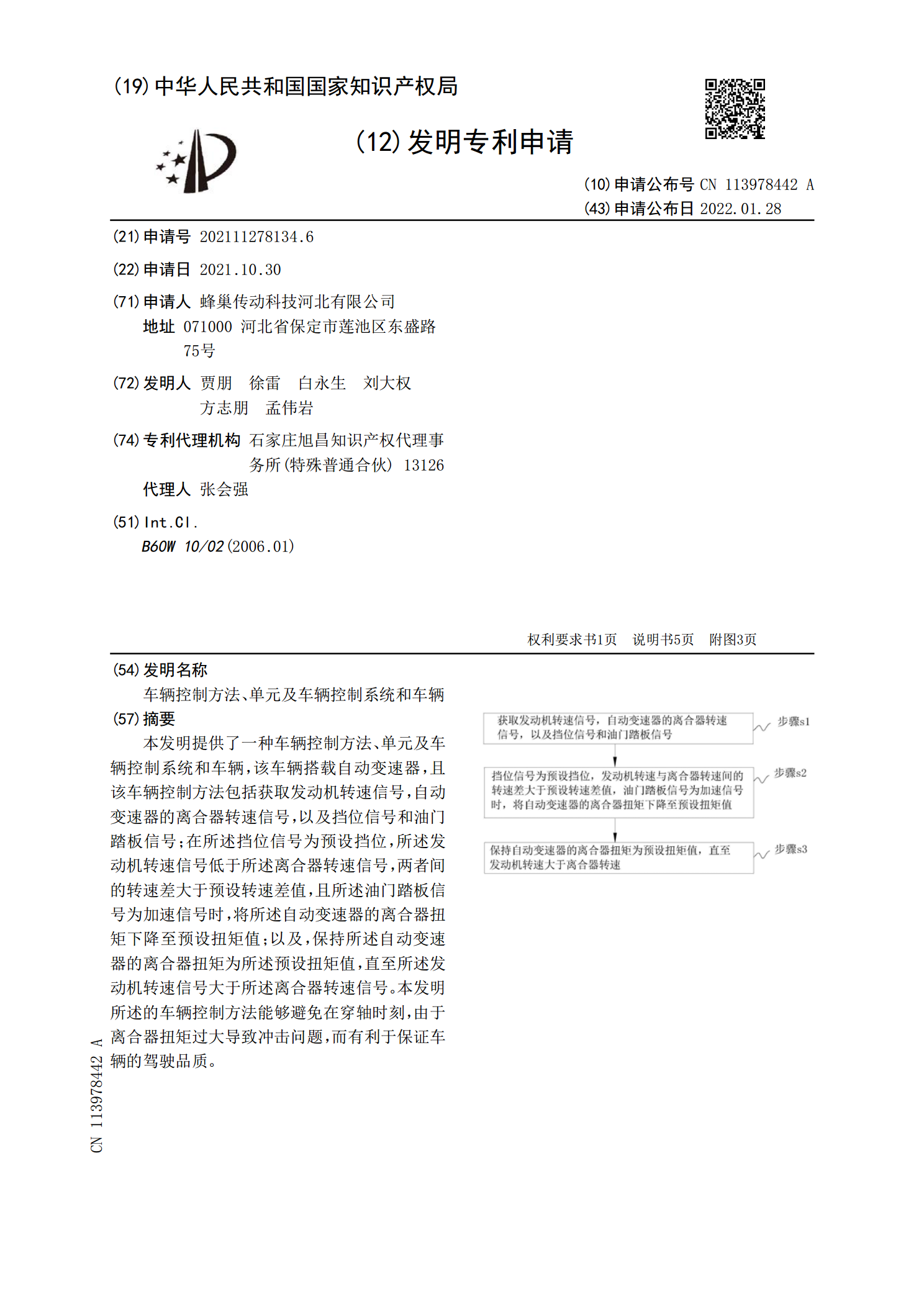
本发明提供了一种车辆控制方法、单元及车辆控制系统和车辆,该车辆搭载自动变速器,且该车辆控制方法包括获取发动机转速信号,自动变速器的离合器转速信号,以及挡位信号和油门踏板信号;在所述挡位信号为预设挡位,所述发动机转速信号低于所述离合器转速信号,两者间的转速差大于预设转速差值,且所述油门踏板信号为加速信号时,将所述自动变速器的离合器扭矩下降至预设扭矩值;以及,保持所述自动变速器的离合器扭矩为所述预设扭矩值,直至所述发动机转速信号大于所述离合器转速信号。本发明所述的车辆控制方法能够避免在穿轴时刻,由于离合器扭矩
车辆辅助控制系统、车辆和车辆辅助控制方法.pdf
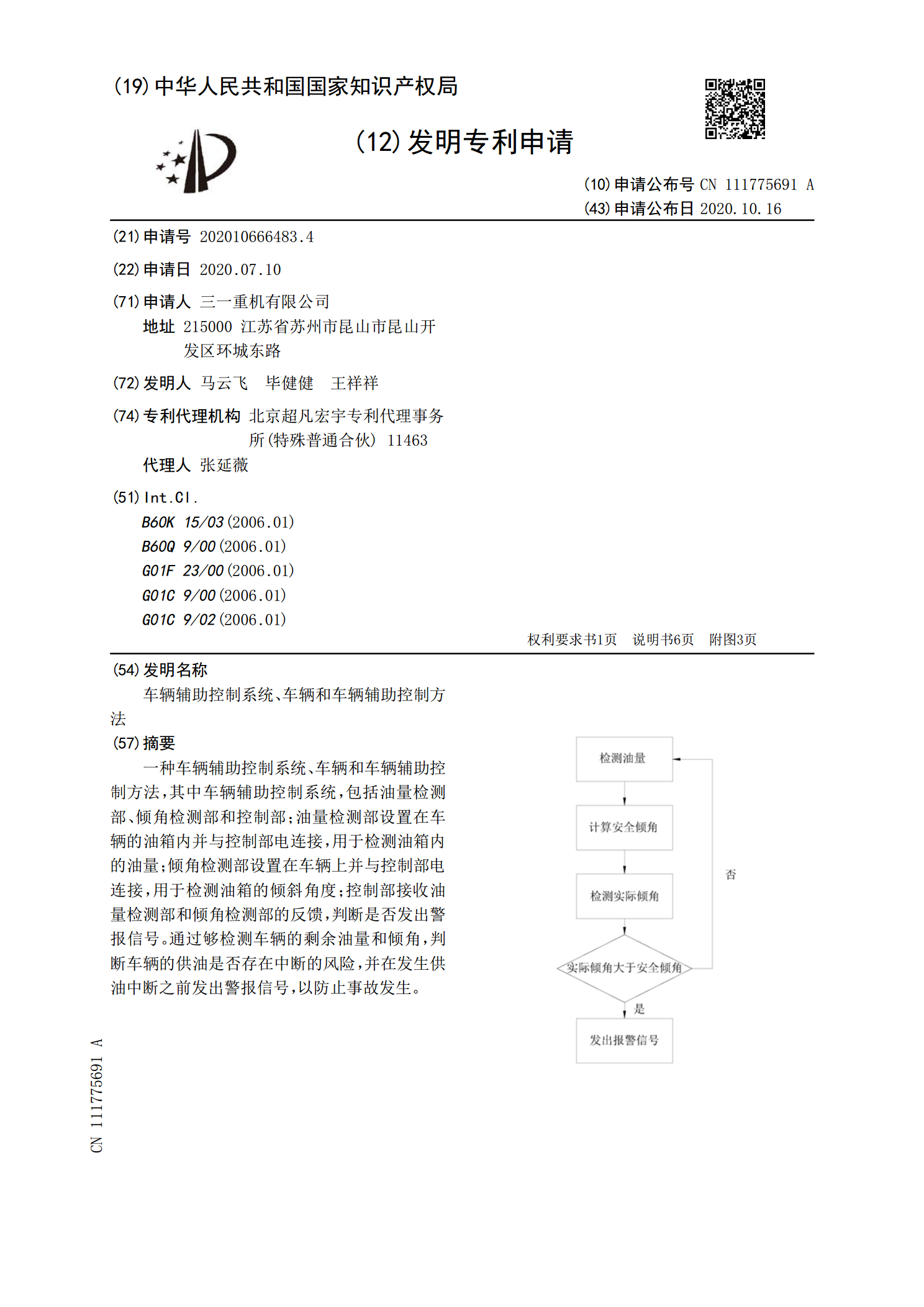
一种车辆辅助控制系统、车辆和车辆辅助控制方法,其中车辆辅助控制系统,包括油量检测部、倾角检测部和控制部;油量检测部设置在车辆的油箱内并与控制部电连接,用于检测油箱内的油量;倾角检测部设置在车辆上并与控制部电连接,用于检测油箱的倾斜角度;控制部接收油量检测部和倾角检测部的反馈,判断是否发出警报信号。通过够检测车辆的剩余油量和倾角,判断车辆的供油是否存在中断的风险,并在发生供油中断之前发出警报信号,以防止事故发生。