
识别车辆与障碍物距离的方法、装置、设备和存储介质.pdf

猫巷****盟主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
识别车辆与障碍物距离的方法、装置、设备和存储介质.pdf
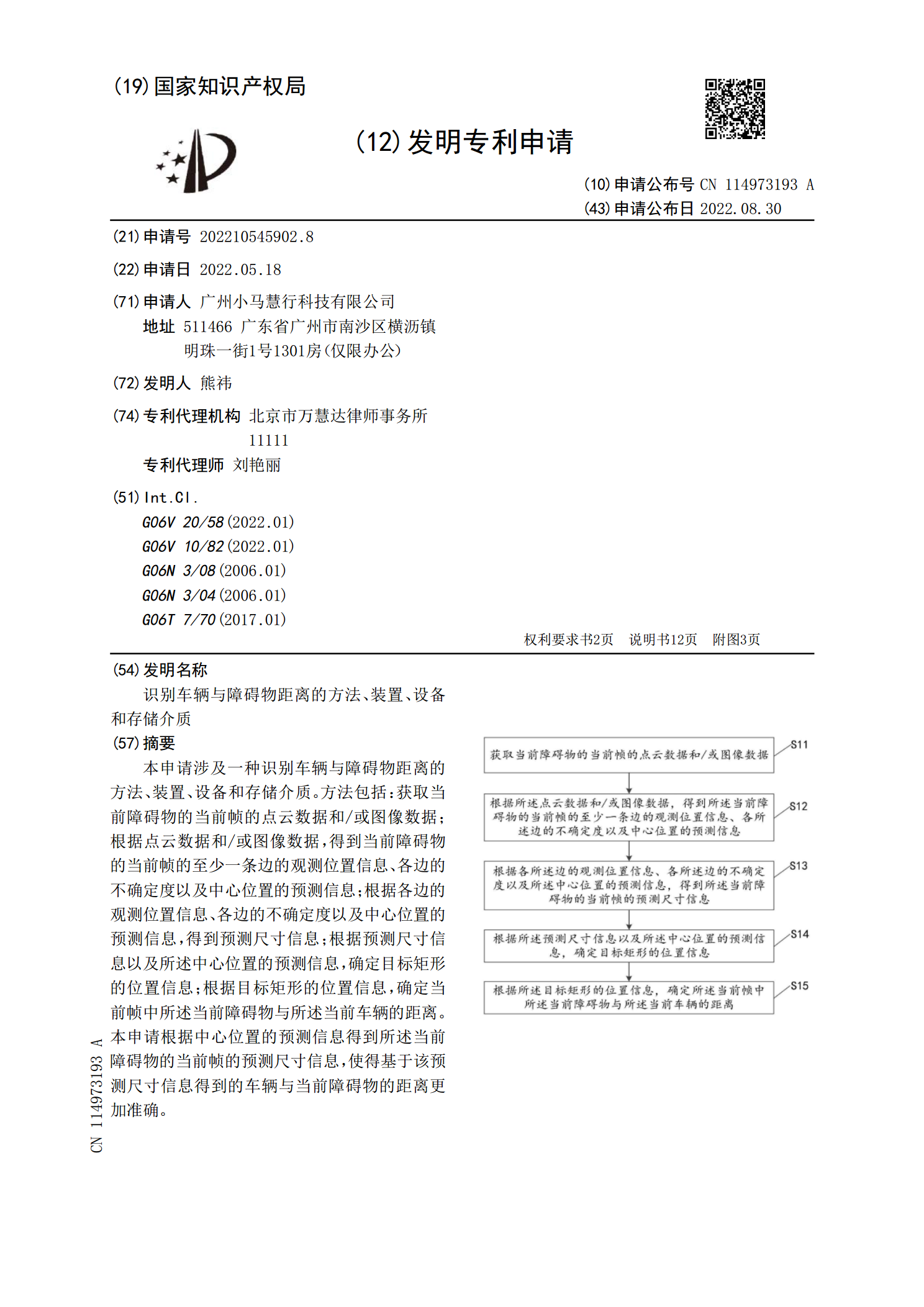
本申请涉及一种识别车辆与障碍物距离的方法、装置、设备和存储介质。方法包括:获取当前障碍物的当前帧的点云数据和/或图像数据;根据点云数据和/或图像数据,得到当前障碍物的当前帧的至少一条边的观测位置信息、各边的不确定度以及中心位置的预测信息;根据各边的观测位置信息、各边的不确定度以及中心位置的预测信息,得到预测尺寸信息;根据预测尺寸信息以及所述中心位置的预测信息,确定目标矩形的位置信息;根据目标矩形的位置信息,确定当前帧中所述当前障碍物与所述当前车辆的距离。本申请根据中心位置的预测信息得到所述当前障碍物的当前
车辆识别方法、装置、设备和存储介质.pdf
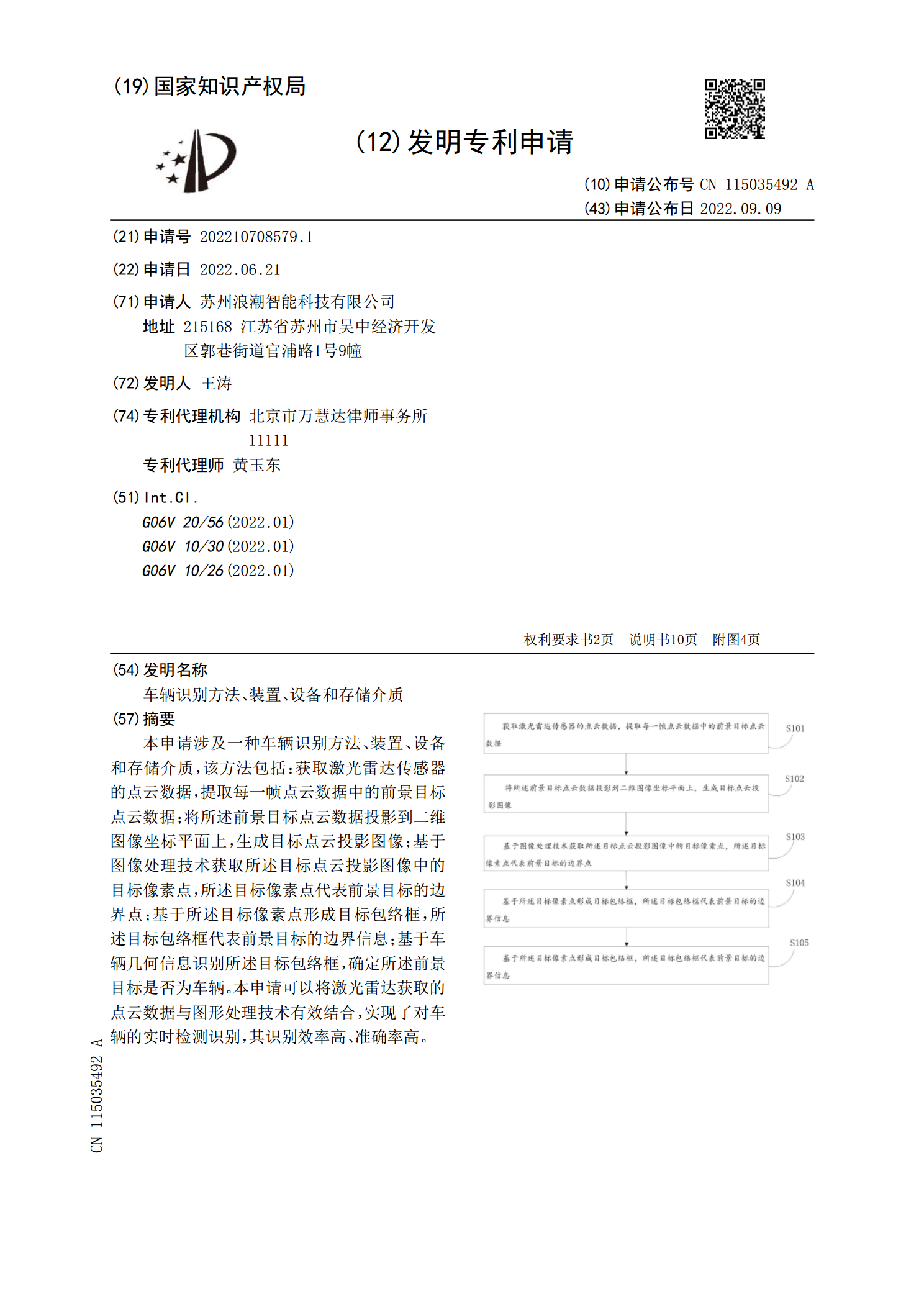
本申请涉及一种车辆识别方法、装置、设备和存储介质,该方法包括:获取激光雷达传感器的点云数据,提取每一帧点云数据中的前景目标点云数据;将所述前景目标点云数据投影到二维图像坐标平面上,生成目标点云投影图像;基于图像处理技术获取所述目标点云投影图像中的目标像素点,所述目标像素点代表前景目标的边界点;基于所述目标像素点形成目标包络框,所述目标包络框代表前景目标的边界信息;基于车辆几何信息识别所述目标包络框,确定所述前景目标是否为车辆。本申请可以将激光雷达获取的点云数据与图形处理技术有效结合,实现了对车辆的实时检测

车辆识别方法、装置、设备和存储介质.pdf
本发明实施例提供一种车辆识别方法、装置、设备和存储介质,该方法包括:获取包含目标车辆的图像;通过第一模型对图像进行特征提取以得到第一图像特征;通过第二模型对图像进行特征提取以得到第二图像特征,第一模型能够识别的车辆类别是第一类别,第二模型的训练样本图像中所包含车辆属于第二类别,第一类别与第二类别匹配。融合第一图像特征和第二图像特征以得到第三图像特征,根据第三图像特征确定目标对象的类别,以保证图像中目标车辆的类别被准确识别。
逆行障碍物识别方法、装置、设备及存储介质.pdf
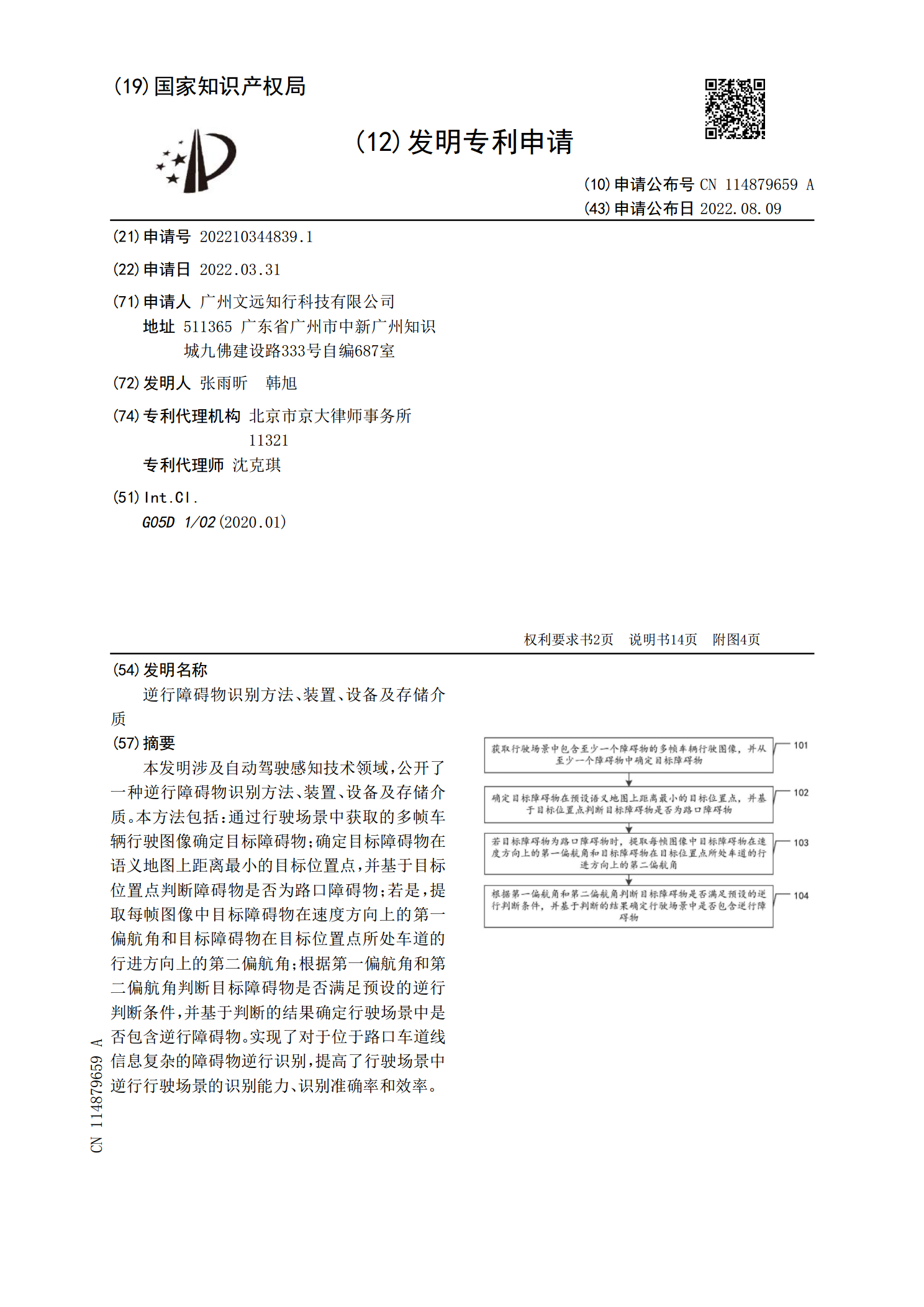
本发明涉及自动驾驶感知技术领域,公开了一种逆行障碍物识别方法、装置、设备及存储介质。本方法包括:通过行驶场景中获取的多帧车辆行驶图像确定目标障碍物;确定目标障碍物在语义地图上距离最小的目标位置点,并基于目标位置点判断障碍物是否为路口障碍物;若是,提取每帧图像中目标障碍物在速度方向上的第一偏航角和目标障碍物在目标位置点所处车道的行进方向上的第二偏航角;根据第一偏航角和第二偏航角判断目标障碍物是否满足预设的逆行判断条件,并基于判断的结果确定行驶场景中是否包含逆行障碍物。实现了对于位于路口车道线信息复杂的障碍物
车辆识别方法、装置、设备及存储介质.pdf
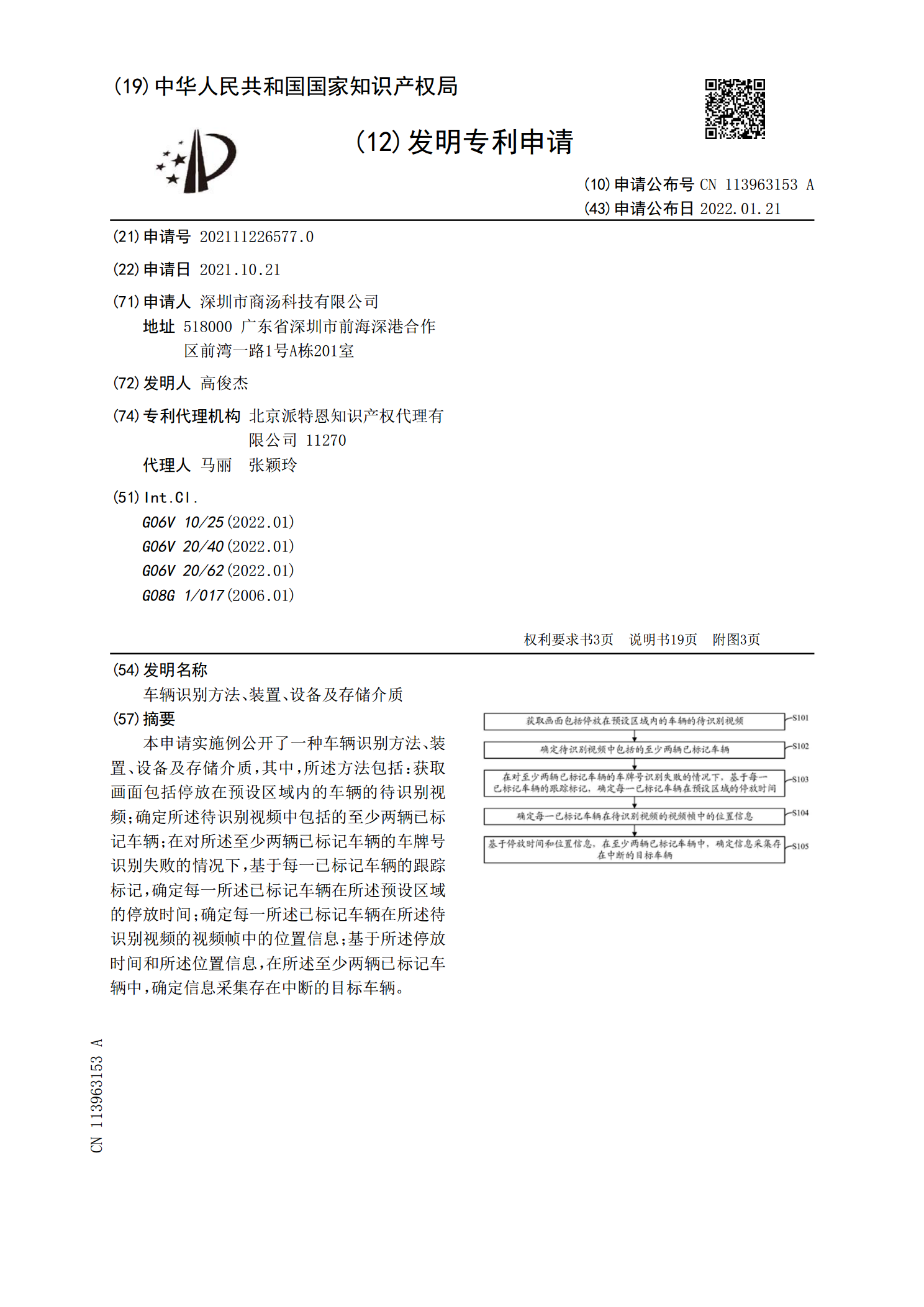
本申请实施例公开了一种车辆识别方法、装置、设备及存储介质,其中,所述方法包括:获取画面包括停放在预设区域内的车辆的待识别视频;确定所述待识别视频中包括的至少两辆已标记车辆;在对所述至少两辆已标记车辆的车牌号识别失败的情况下,基于每一已标记车辆的跟踪标记,确定每一所述已标记车辆在所述预设区域的停放时间;确定每一所述已标记车辆在所述待识别视频的视频帧中的位置信息;基于所述停放时间和所述位置信息,在所述至少两辆已标记车辆中,确定信息采集存在中断的目标车辆。