
一种空间机械臂末端抓取机构与抓取方法.pdf

文光****iu

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种空间机械臂末端抓取机构与抓取方法.pdf
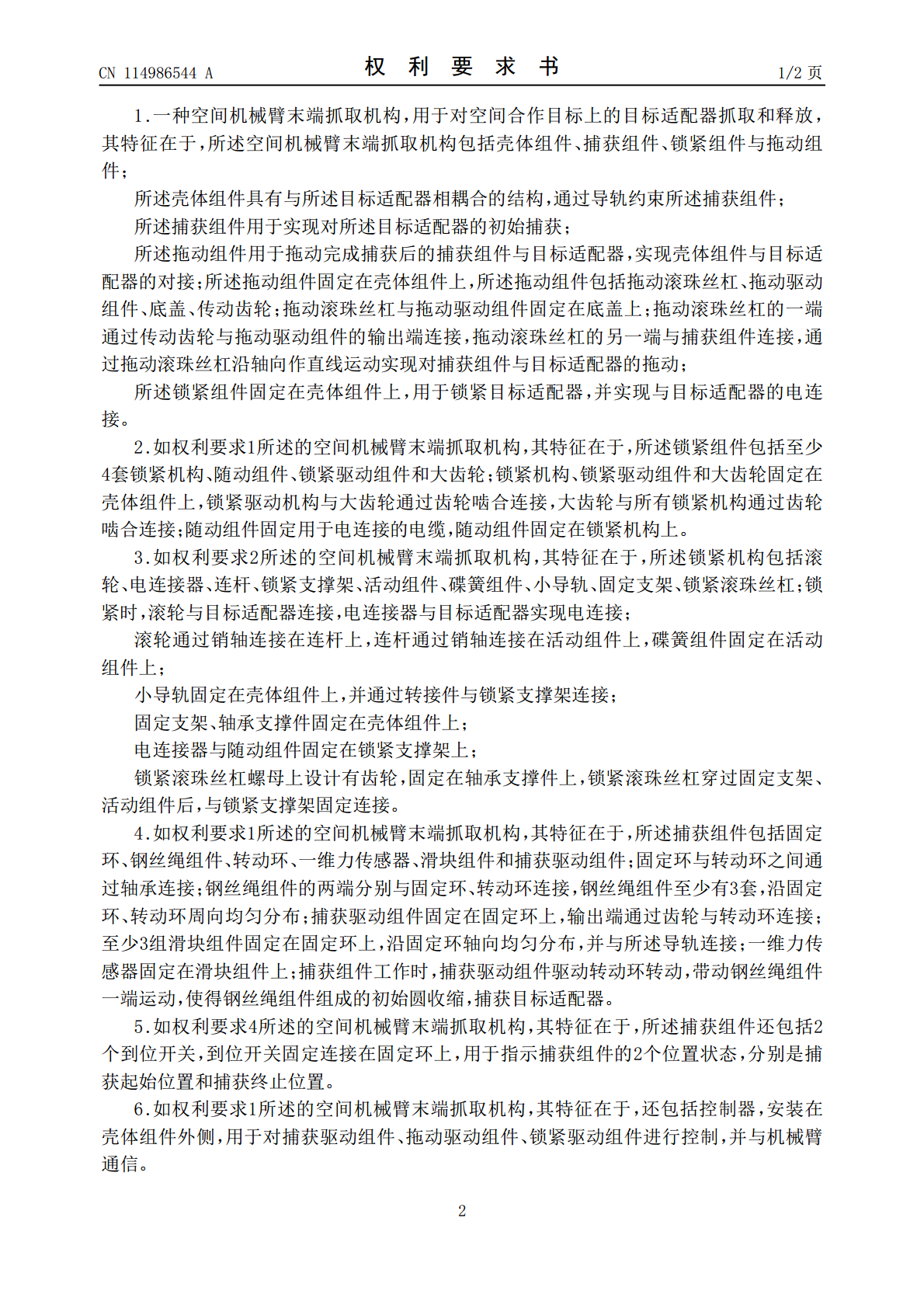
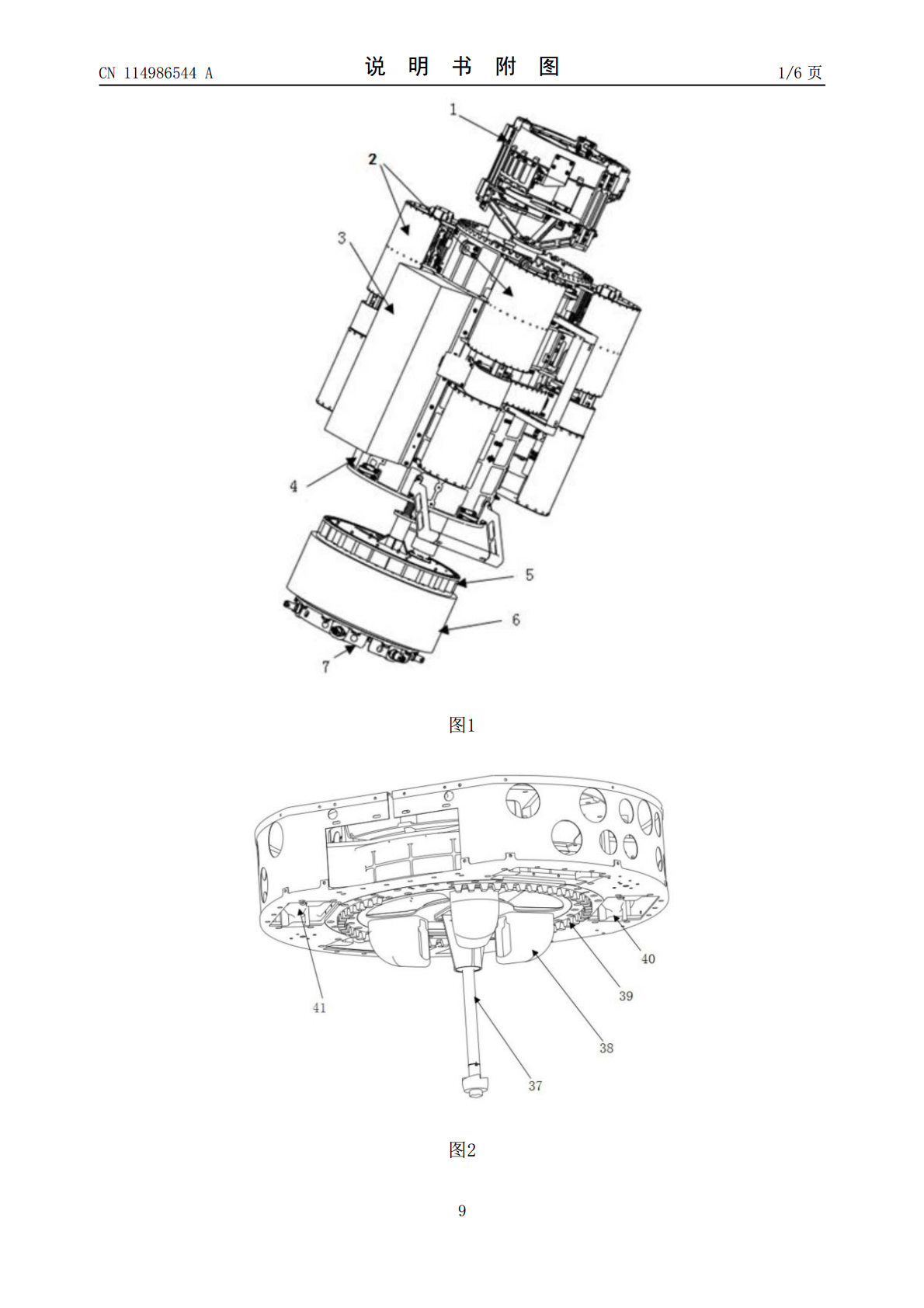
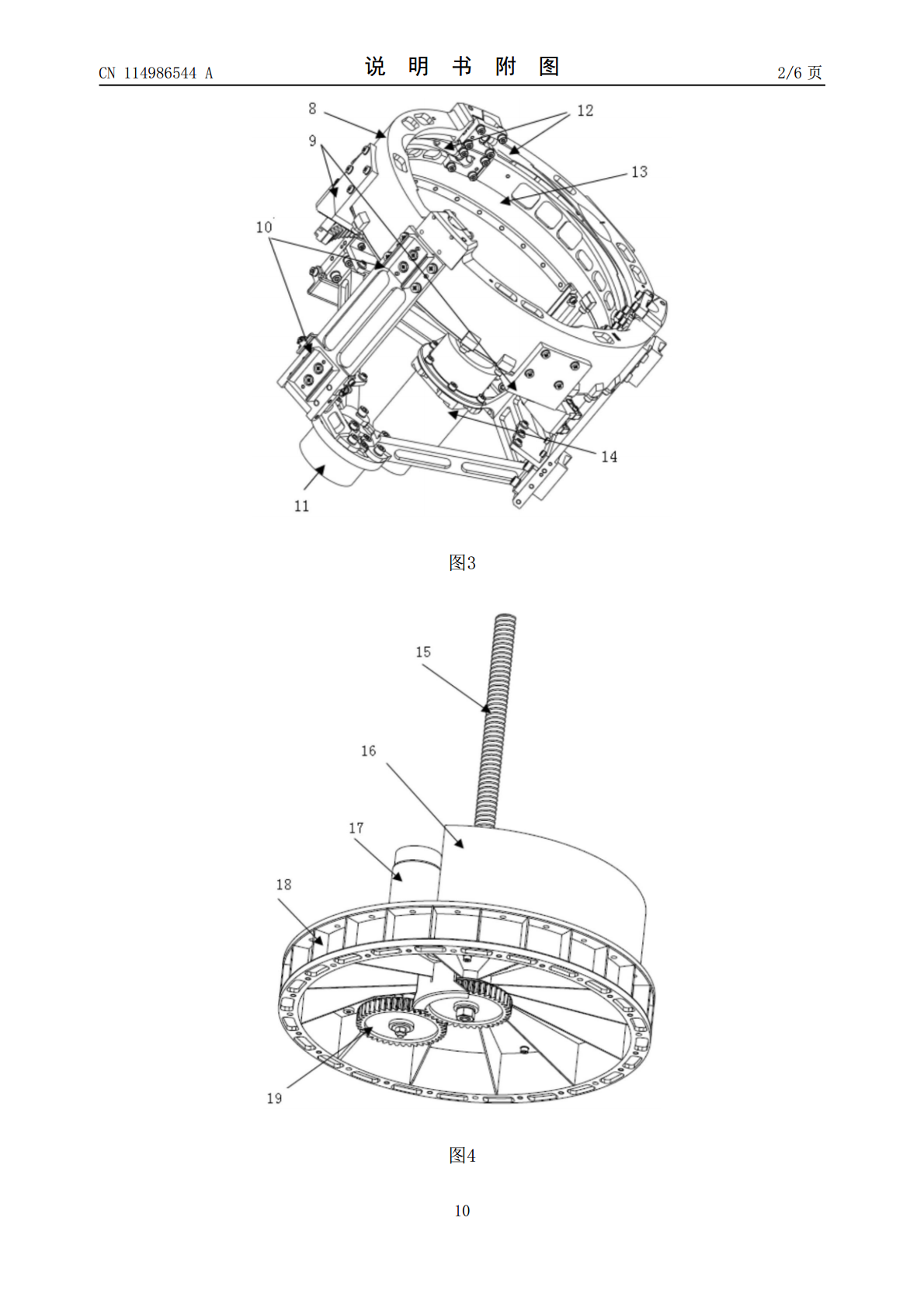
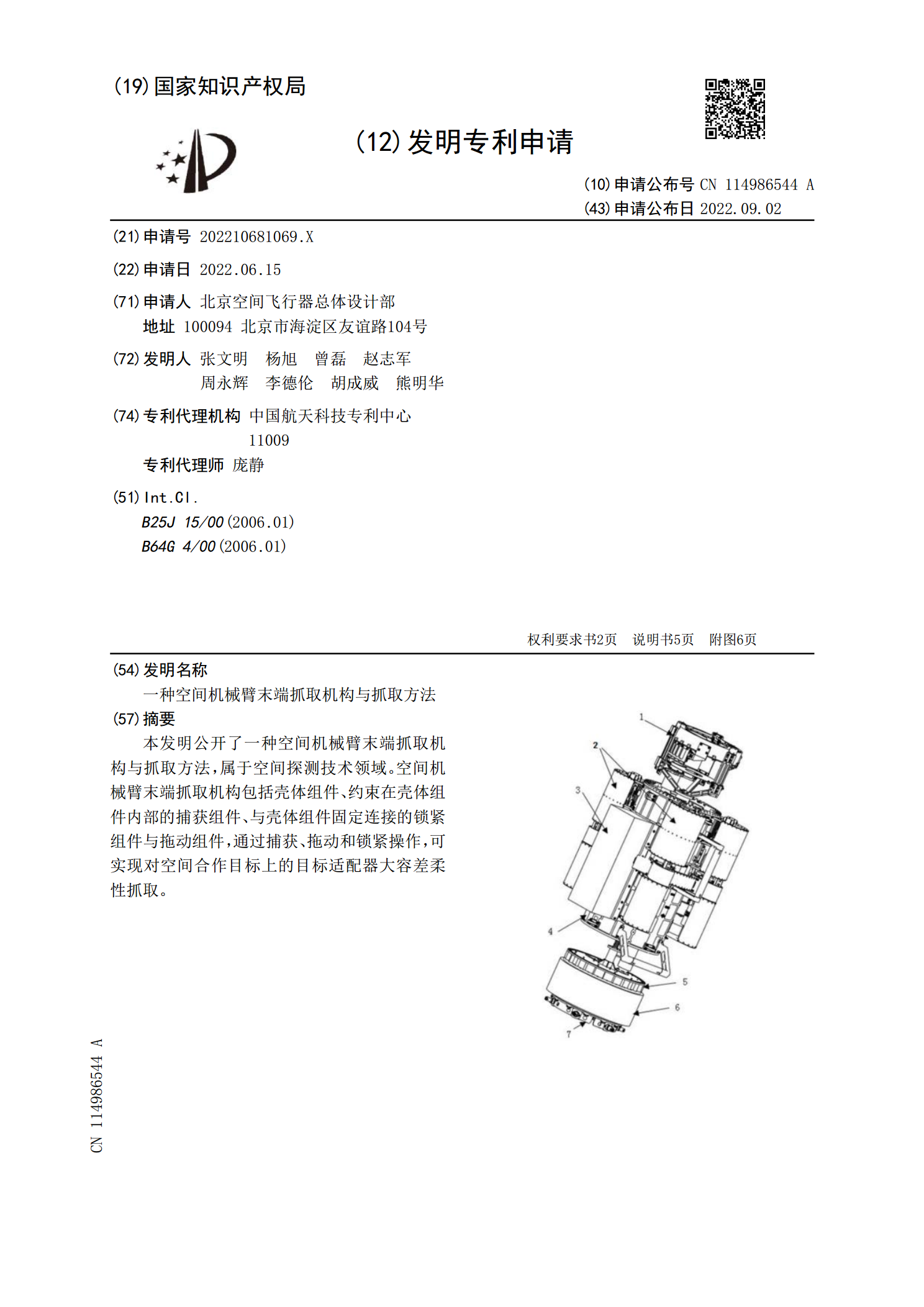
本发明公开了一种空间机械臂末端抓取机构与抓取方法,属于空间探测技术领域。空间机械臂末端抓取机构包括壳体组件、约束在壳体组件内部的捕获组件、与壳体组件固定连接的锁紧组件与拖动组件,通过捕获、拖动和锁紧操作,可实现对空间合作目标上的目标适配器大容差柔性抓取。
一种抓取用机械臂末端夹紧装置.pdf
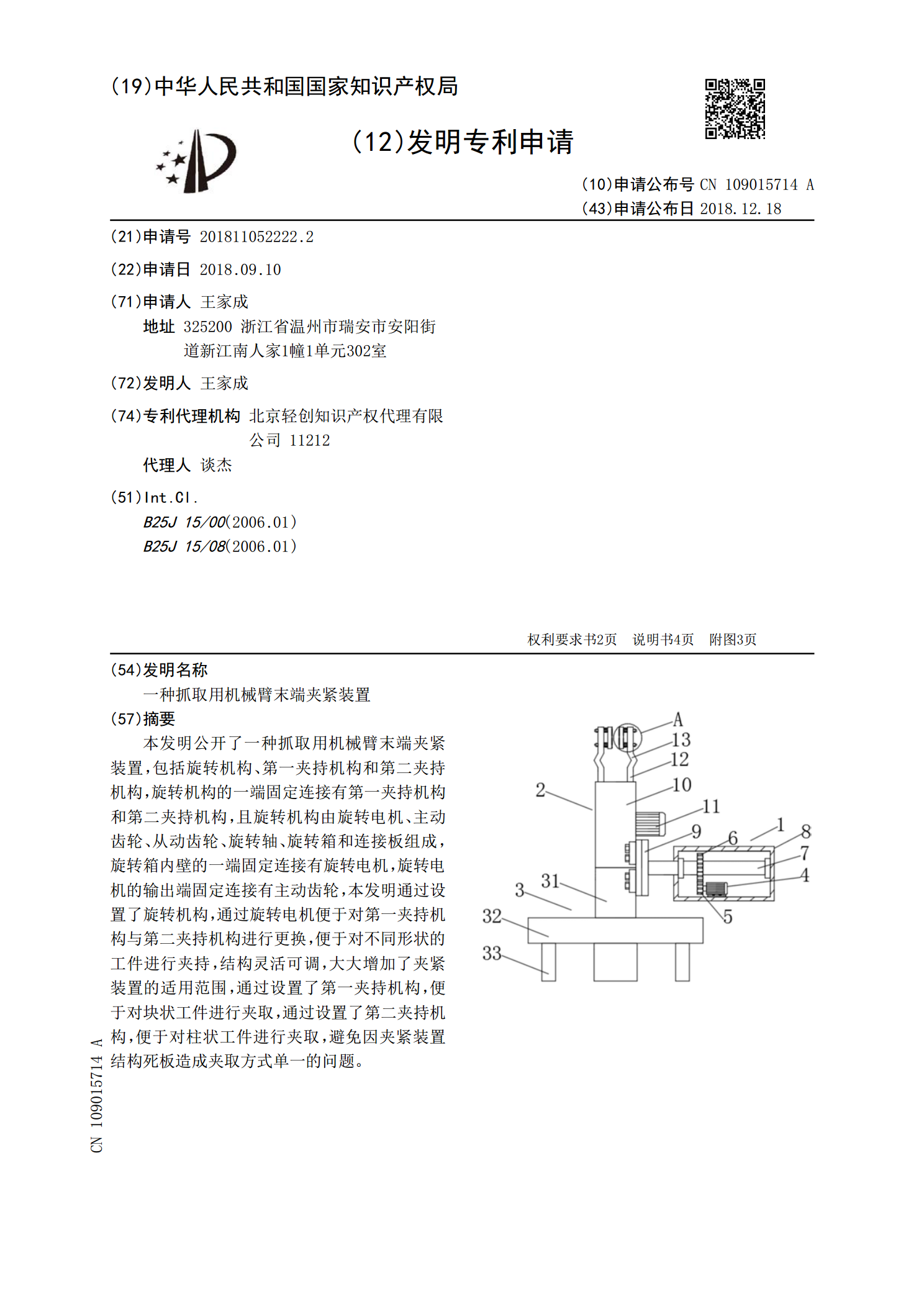
本发明公开了一种抓取用机械臂末端夹紧装置,包括旋转机构、第一夹持机构和第二夹持机构,旋转机构的一端固定连接有第一夹持机构和第二夹持机构,且旋转机构由旋转电机、主动齿轮、从动齿轮、旋转轴、旋转箱和连接板组成,旋转箱内壁的一端固定连接有旋转电机,旋转电机的输出端固定连接有主动齿轮,本发明通过设置了旋转机构,通过旋转电机便于对第一夹持机构与第二夹持机构进行更换,便于对不同形状的工件进行夹持,结构灵活可调,大大增加了夹紧装置的适用范围,通过设置了第一夹持机构,便于对块状工件进行夹取,通过设置了第二夹持机构,便于对

一种末端抓取机构.pdf
一种末端抓取机构属于机器人末端抓取领域,该机构包括:力矩电机、谐波减速器、螺旋盘轴、胀紧手、手眼相机、抓取机构外壳和抓取机构安装座;所述力矩电机产生动力,通过谐波减速器带动螺旋盘轴旋转;胀紧手与螺旋盘轴啮合,在抓取机构外壳导向槽里做径向移动;手眼相机安装在抓取机构外壳前端;力矩电机和谐波减速器安装在抓取机构安装座内,螺旋盘轴和胀紧手安装在抓取机构外壳内。本发明的有益效果是:本发明末端插入式抓取机构有利于导向,抓取力很大,机构尺寸小,设计简单可靠,容易实现。抓取机构中心设计成中空,利于抓取机构前端相机走线,
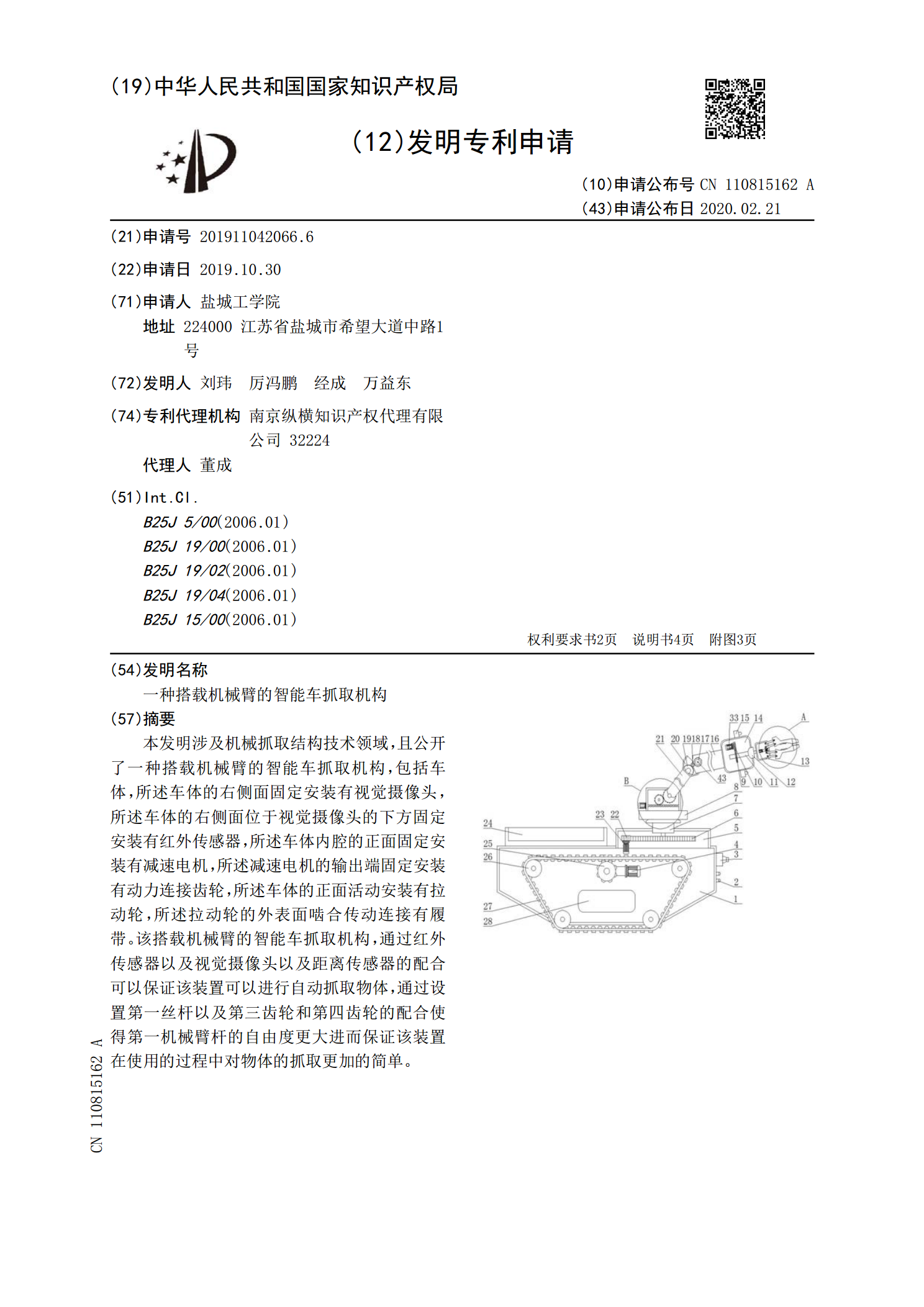
一种搭载机械臂的智能车抓取机构.pdf
本发明涉及机械抓取结构技术领域,且公开了一种搭载机械臂的智能车抓取机构,包括车体,所述车体的右侧面固定安装有视觉摄像头,所述车体的右侧面位于视觉摄像头的下方固定安装有红外传感器,所述车体内腔的正面固定安装有减速电机,所述减速电机的输出端固定安装有动力连接齿轮,所述车体的正面活动安装有拉动轮,所述拉动轮的外表面啮合传动连接有履带。该搭载机械臂的智能车抓取机构,通过红外传感器以及视觉摄像头以及距离传感器的配合可以保证该装置可以进行自动抓取物体,通过设置第一丝杆以及第三齿轮和第四齿轮的配合使得第一机械臂杆的自由
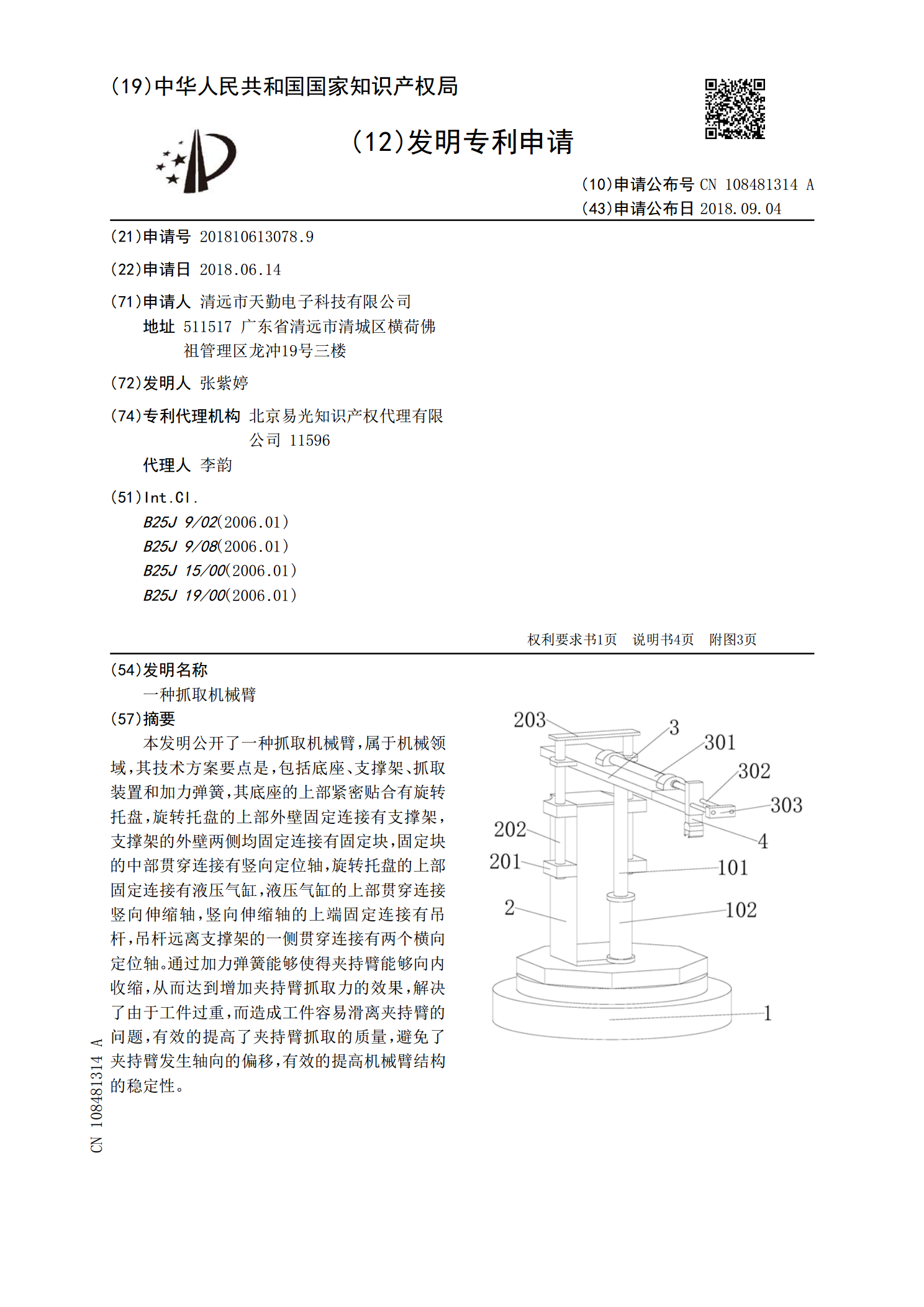
一种抓取机械臂.pdf
本发明公开了一种抓取机械臂,属于机械领域,其技术方案要点是,包括底座、支撑架、抓取装置和加力弹簧,其底座的上部紧密贴合有旋转托盘,旋转托盘的上部外壁固定连接有支撑架,支撑架的外壁两侧均固定连接有固定块,固定块的中部贯穿连接有竖向定位轴,旋转托盘的上部固定连接有液压气缸,液压气缸的上部贯穿连接竖向伸缩轴,竖向伸缩轴的上端固定连接有吊杆,吊杆远离支撑架的一侧贯穿连接有两个横向定位轴。通过加力弹簧能够使得夹持臂能够向内收缩,从而达到增加夹持臂抓取力的效果,解决了由于工件过重,而造成工件容易滑离夹持臂的问题,有效