
一种抓取机械臂.pdf

努力****承悦

1/9
2/9
3/9
4/9
5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种抓取机械臂.pdf
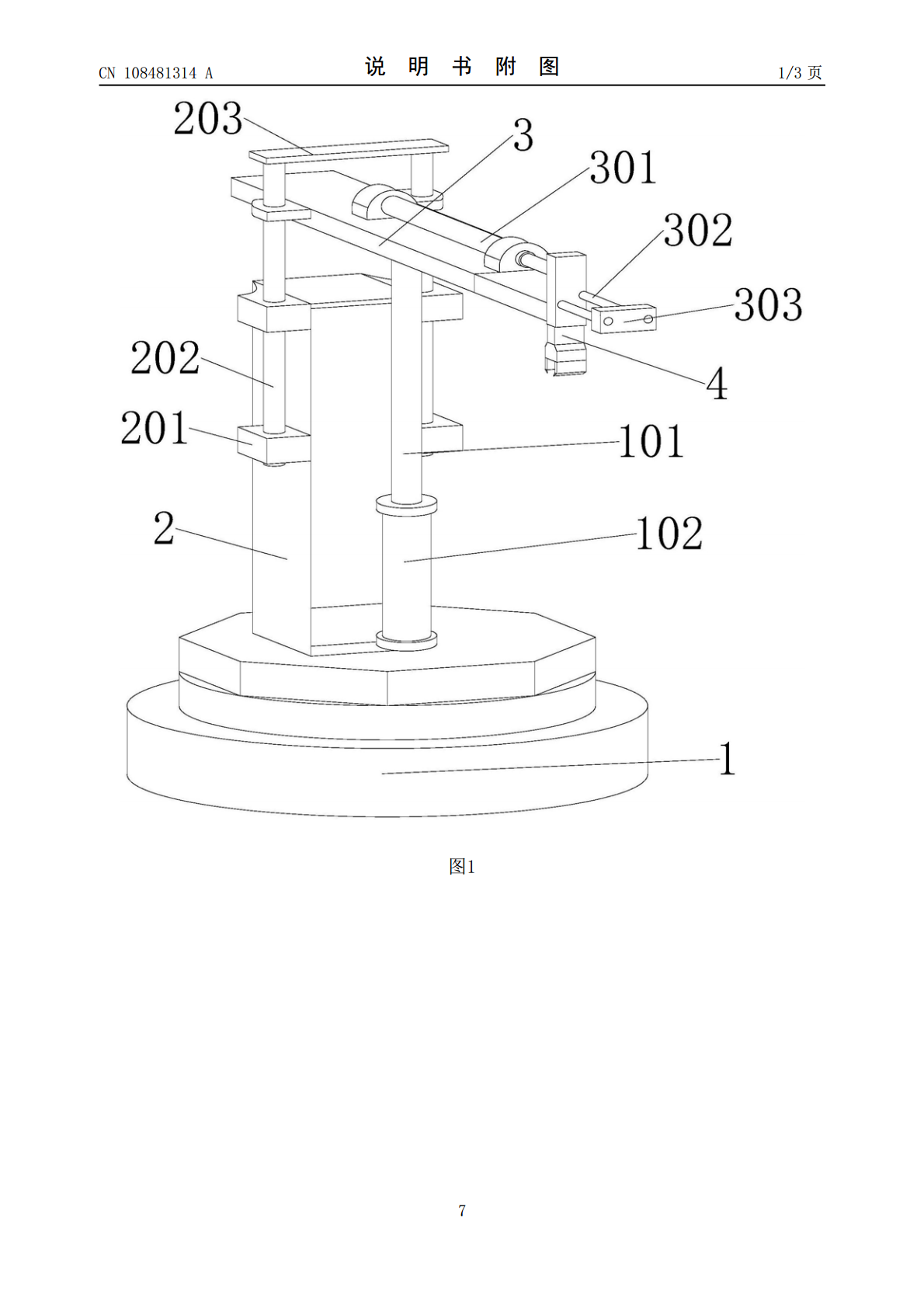
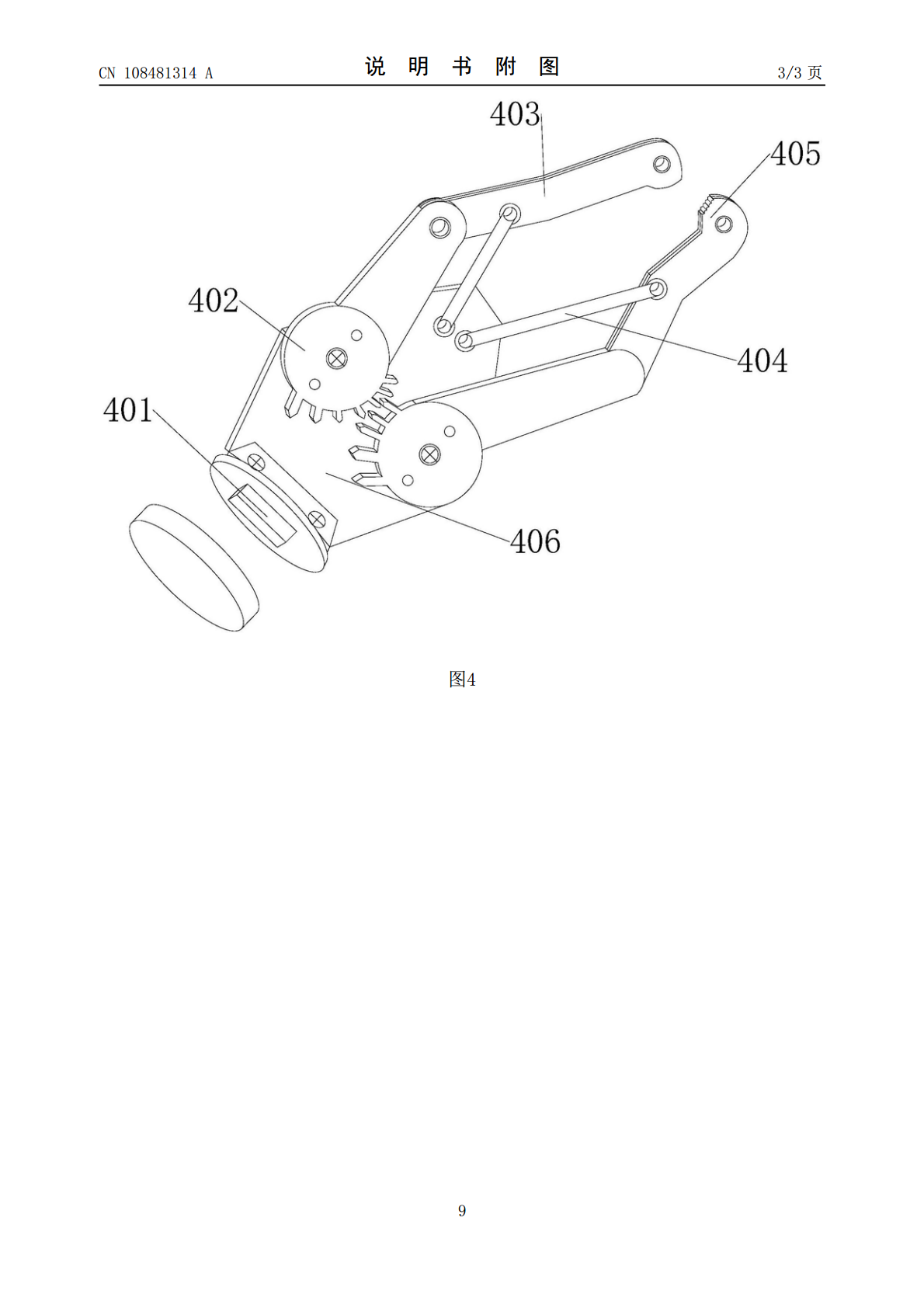
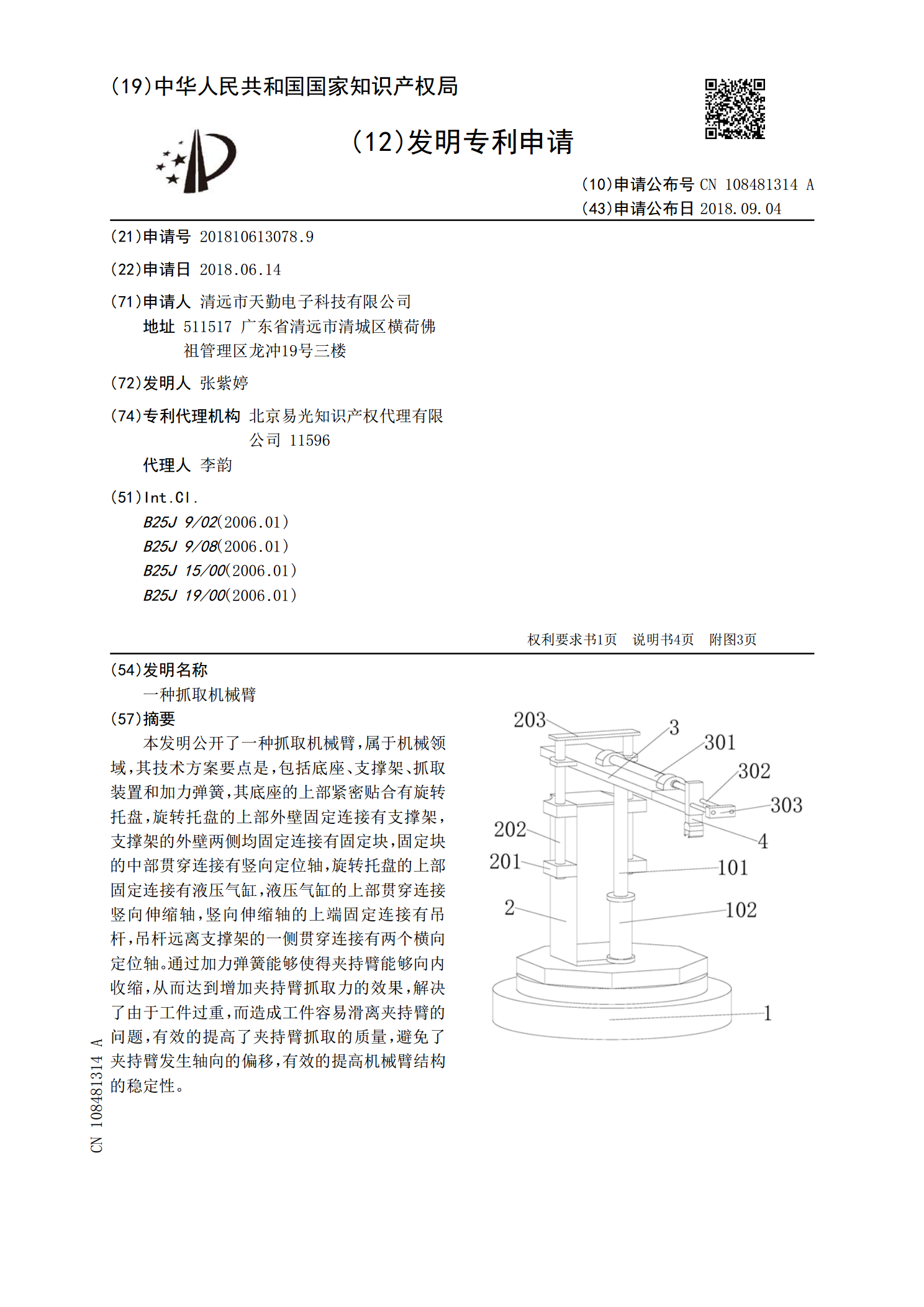
本发明公开了一种抓取机械臂,属于机械领域,其技术方案要点是,包括底座、支撑架、抓取装置和加力弹簧,其底座的上部紧密贴合有旋转托盘,旋转托盘的上部外壁固定连接有支撑架,支撑架的外壁两侧均固定连接有固定块,固定块的中部贯穿连接有竖向定位轴,旋转托盘的上部固定连接有液压气缸,液压气缸的上部贯穿连接竖向伸缩轴,竖向伸缩轴的上端固定连接有吊杆,吊杆远离支撑架的一侧贯穿连接有两个横向定位轴。通过加力弹簧能够使得夹持臂能够向内收缩,从而达到增加夹持臂抓取力的效果,解决了由于工件过重,而造成工件容易滑离夹持臂的问题,有效
一种空间机械臂末端抓取机构与抓取方法.pdf
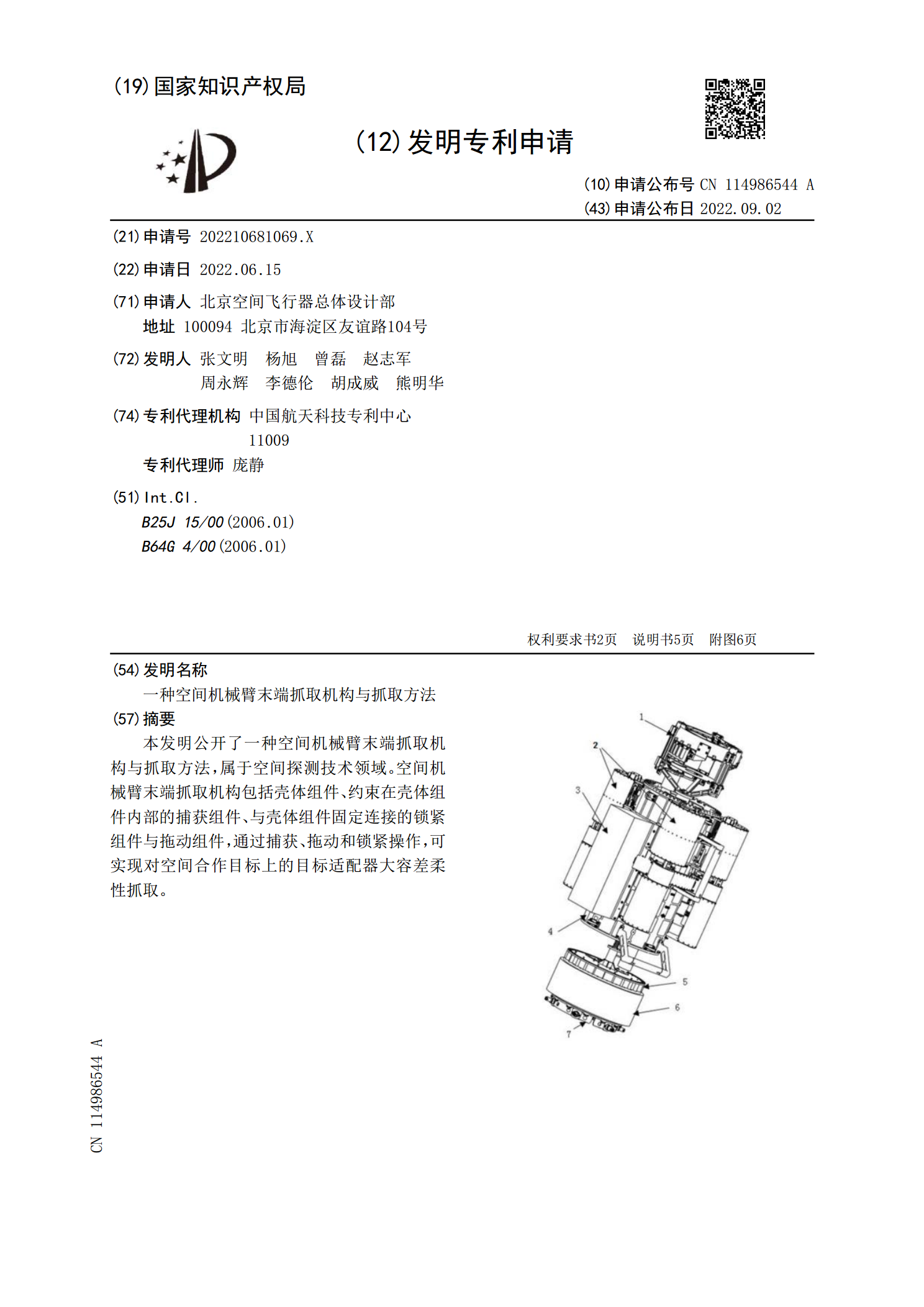
本发明公开了一种空间机械臂末端抓取机构与抓取方法,属于空间探测技术领域。空间机械臂末端抓取机构包括壳体组件、约束在壳体组件内部的捕获组件、与壳体组件固定连接的锁紧组件与拖动组件,通过捕获、拖动和锁紧操作,可实现对空间合作目标上的目标适配器大容差柔性抓取。
一种机械臂及其抓取装置.pdf
本发明的一种机械臂及其抓取装置,包括至少两根操作手指,所述操作手指包括第一连杆、第二连杆及第三连杆;所述第一连杆的一端与第二连杆的一端均与第三连杆的一端连接,所述第三连杆另一端为自由端;所述第一连杆的另一端与主电机驱动的传动杆及传动螺母底座连接,所述第二连杆通过连杆座与独立电机驱动的锥齿轮传动副连接。本发明可以使复杂形态的重物抓取更加灵活稳定,大大提高了抓取装置对于复杂形态物体的抓取能力以及环境自适应能力。

一种管道抓取用机械爪臂.pdf
本发明公开了一种管道抓取用机械爪臂,包括套管、支撑支座、爪臂本体和伸缩杆,所述套管内设置有液压杆,且液压杆的下端位于套管的管端外,所述液压杆的外侧套设有限位环,且液压杆的杆端开设有固定槽,且连杆的另一端安装有固定销,并且固定销设置于固定槽内,所述支撑支座的底部铺设有垫片,且支撑支座通过弹性件与限位环相互连接,所述爪臂本体的边端设置有第一转轴,且爪臂本体通过第一转轴与套管的管端相互连接,所述爪臂本体的内侧安装有垫条,且爪臂本体的顶部预留有滑槽,所述伸缩杆的一端设置于滑槽。该机械爪臂,更适用于对不同截面直径大
一种食品打包用抓取机械臂.pdf
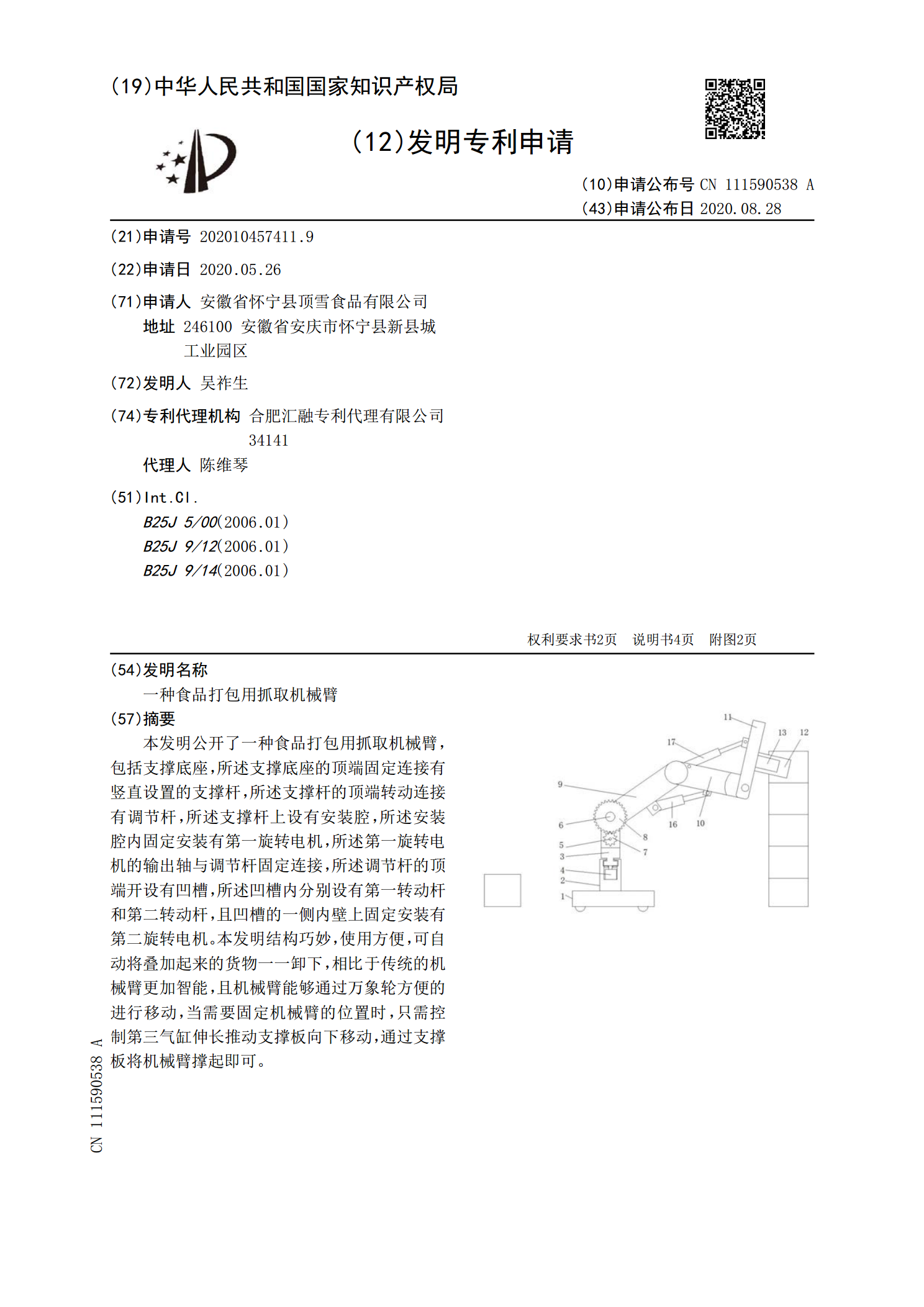
本发明公开了一种食品打包用抓取机械臂,包括支撑底座,所述支撑底座的顶端固定连接有竖直设置的支撑杆,所述支撑杆的顶端转动连接有调节杆,所述支撑杆上设有安装腔,所述安装腔内固定安装有第一旋转电机,所述第一旋转电机的输出轴与调节杆固定连接,所述调节杆的顶端开设有凹槽,所述凹槽内分别设有第一转动杆和第二转动杆,且凹槽的一侧内壁上固定安装有第二旋转电机。本发明结构巧妙,使用方便,可自动将叠加起来的货物一一卸下,相比于传统的机械臂更加智能,且机械臂能够通过万象轮方便的进行移动,当需要固定机械臂的位置时,只需控制第三气