
一种电力巡检机器人运行姿态的控制方法.pdf

努力****冰心

1/9

2/9
3/9

4/9
5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种电力巡检机器人运行姿态的控制方法.pdf
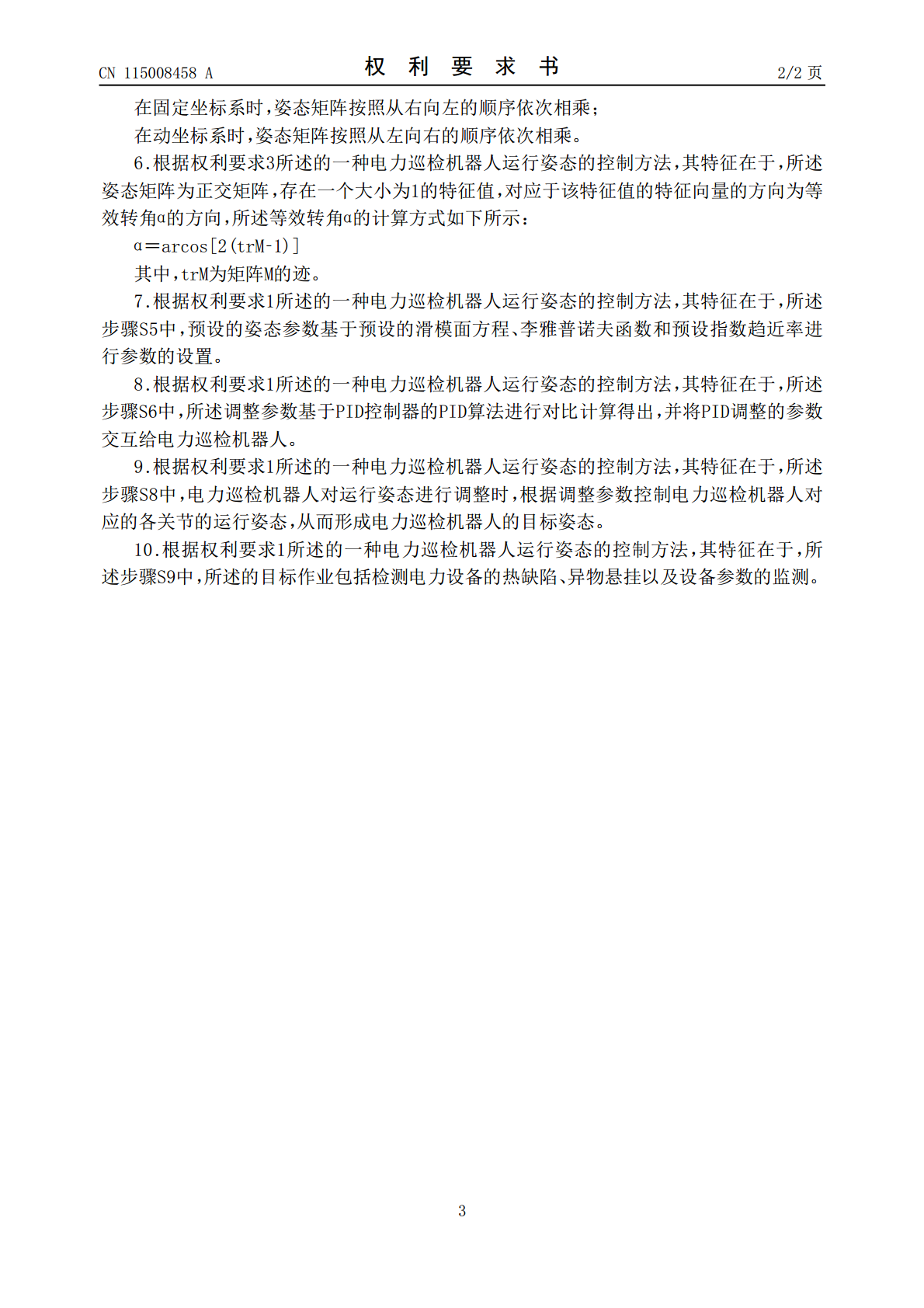
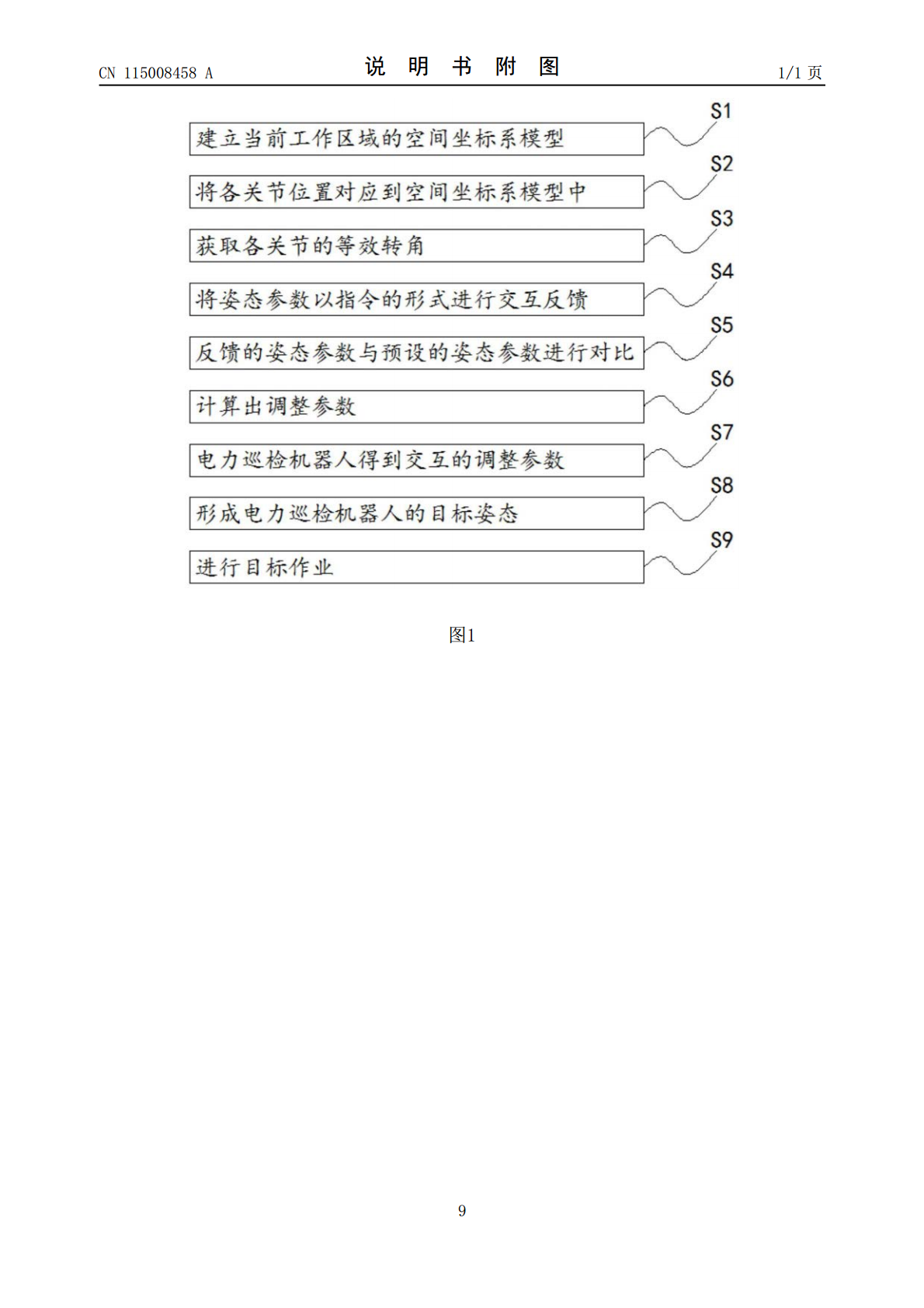
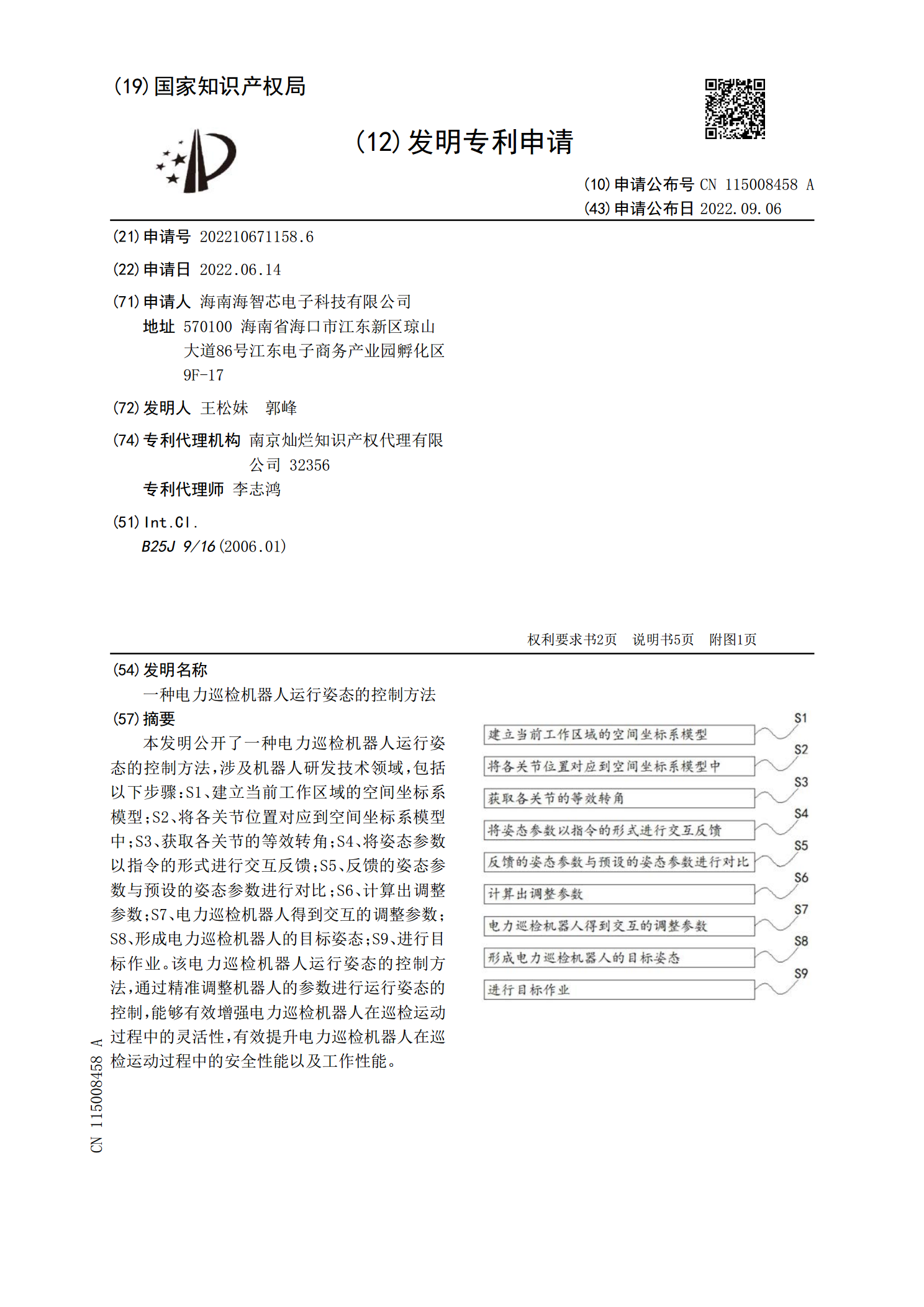
本发明公开了一种电力巡检机器人运行姿态的控制方法,涉及机器人研发技术领域,包括以下步骤:S1、建立当前工作区域的空间坐标系模型;S2、将各关节位置对应到空间坐标系模型中;S3、获取各关节的等效转角;S4、将姿态参数以指令的形式进行交互反馈;S5、反馈的姿态参数与预设的姿态参数进行对比;S6、计算出调整参数;S7、电力巡检机器人得到交互的调整参数;S8、形成电力巡检机器人的目标姿态;S9、进行目标作业。该电力巡检机器人运行姿态的控制方法,通过精准调整机器人的参数进行运行姿态的控制,能够有效增强电力巡检机器人
一种机器人用水下运行姿态控制方法.pdf
(19)中华人民共和国国家知识产权局(12)发明专利说明书(10)申请公布号CN113335481A(43)申请公布日2021.09.03(21)申请号CN202110723448.6(22)申请日2021.06.29(71)申请人深圳市德创水下智能装备有限公司地址518104广东省深圳市宝安区福海街道桥头社区同富裕工业园同富路9号厂房A栋A102(72)发明人吴宝举陈崇辉兰士伟(74)专利代理机构44728深圳至诚化育知识产权代理事务所(普通合伙)代理人刘英(51)Int.CIB63C11/52(200
一种电力巡检机器人.pdf
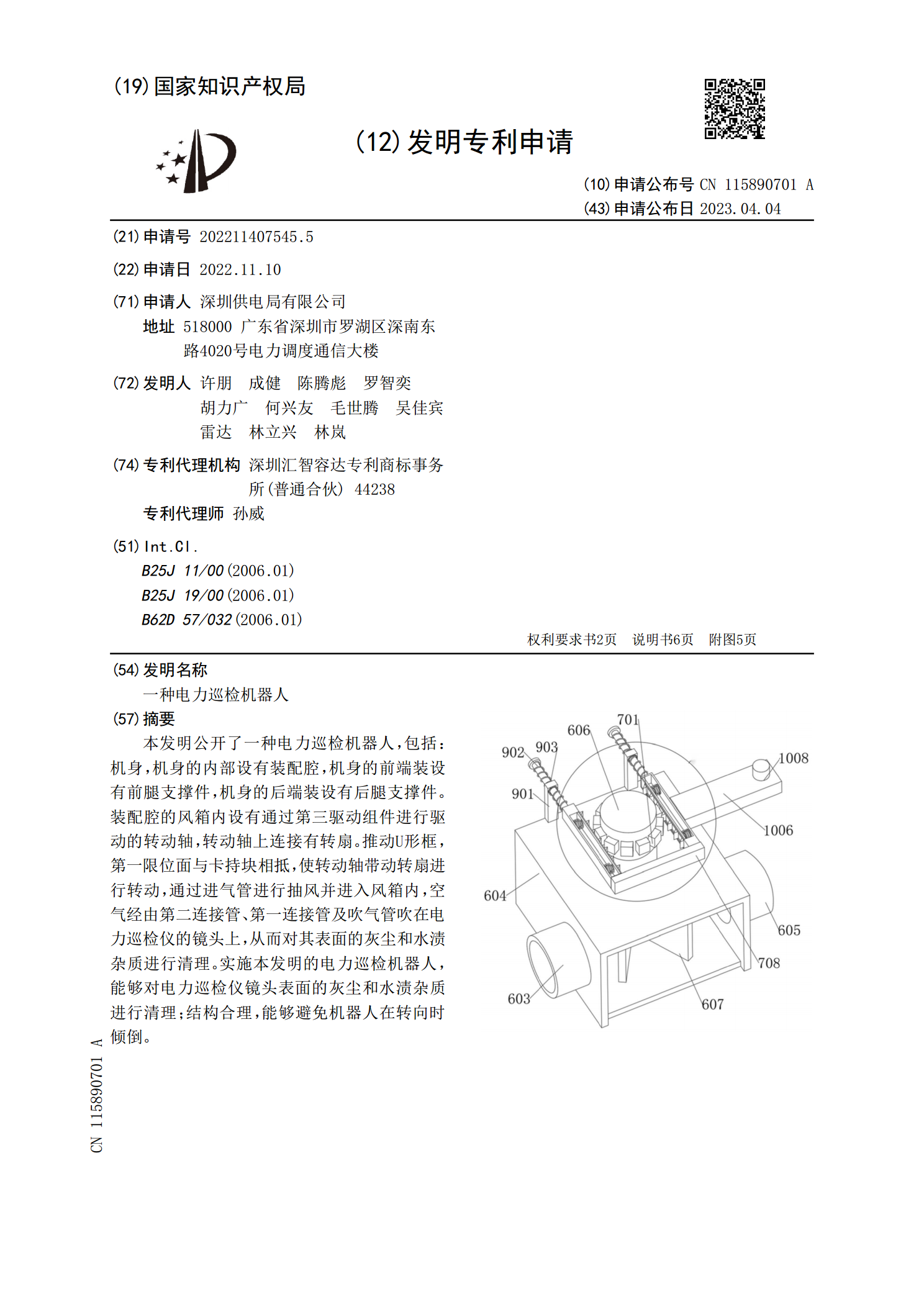
本发明公开了一种电力巡检机器人,包括:机身,机身的内部设有装配腔,机身的前端装设有前腿支撑件,机身的后端装设有后腿支撑件。装配腔的风箱内设有通过第三驱动组件进行驱动的转动轴,转动轴上连接有转扇。推动U形框,第一限位面与卡持块相抵,使转动轴带动转扇进行转动,通过进气管进行抽风并进入风箱内,空气经由第二连接管、第一连接管及吹气管吹在电力巡检仪的镜头上,从而对其表面的灰尘和水渍杂质进行清理。实施本发明的电力巡检机器人,能够对电力巡检仪镜头表面的灰尘和水渍杂质进行清理;结构合理,能够避免机器人在转向时倾倒。

一种电力巡检机器人.pdf
本发明公开了一种电力巡检机器人,包括壳体、底盘系统和云台,所述的底盘系统包括底盘架、前轮组件、后轮组件、悬挂机构和驱动机构,后轮组件通过悬挂机构安装在底盘架上,所述的悬挂机构包括固定设置在底盘架上的固定支撑架,固定支撑架铰接连接有摆臂构件,后轮组件包括一对后轮,后轮安装在摆臂构件上,摆臂构件与固定支撑架之间还连接有减震构件,后轮还连接所述的驱动机构;底盘架上还设置有控制电器件,控制电器件与驱动机构电连接;底盘架的前端部连接有激光雷达,云台中安装有高清日夜型相机和红外热像仪。本发明的电力巡检机器人,能够实现
一种电力巡检机器人.pdf
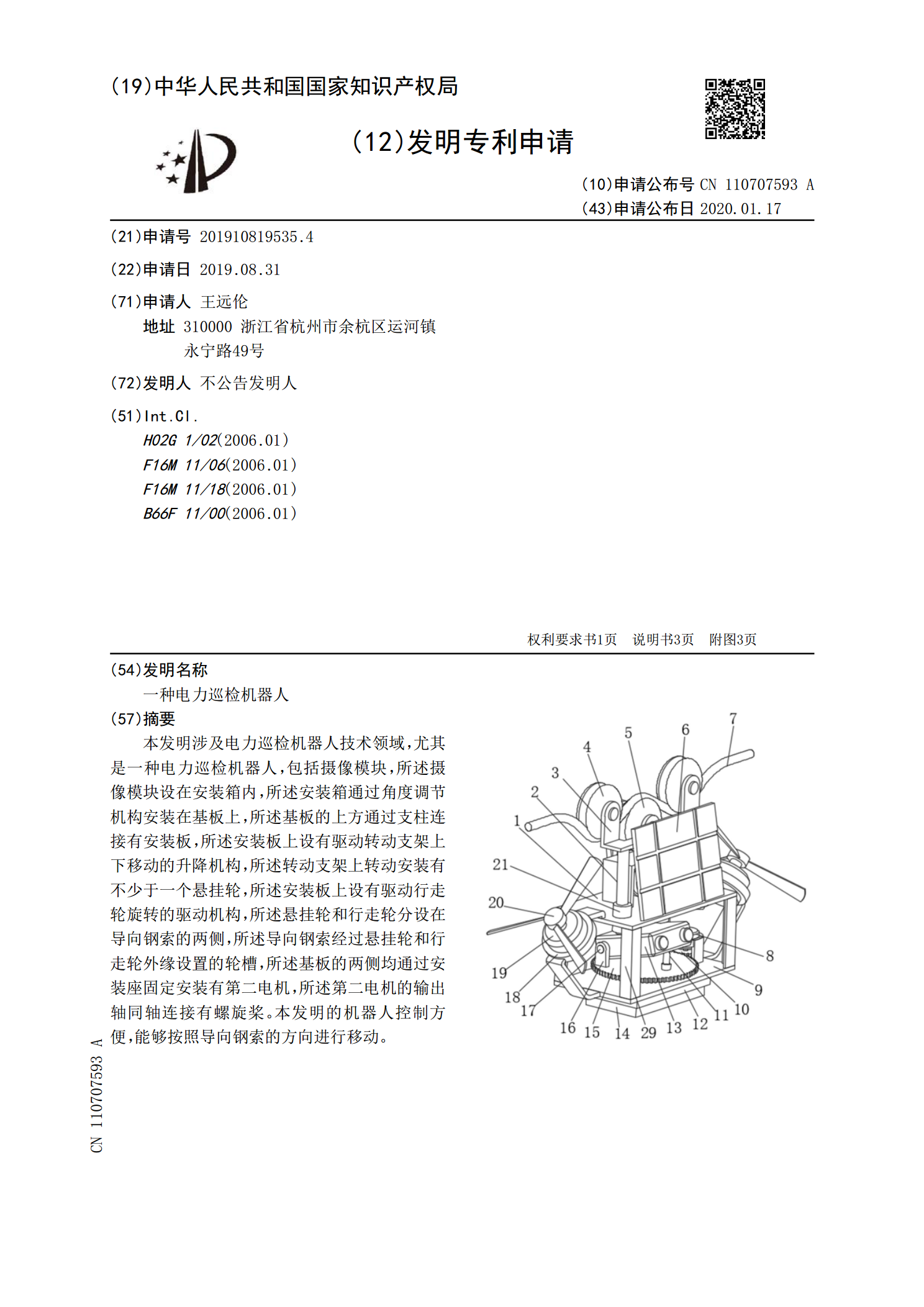
本发明涉及电力巡检机器人技术领域,尤其是一种电力巡检机器人,包括摄像模块,所述摄像模块设在安装箱内,所述安装箱通过角度调节机构安装在基板上,所述基板的上方通过支柱连接有安装板,所述安装板上设有驱动转动支架上下移动的升降机构,所述转动支架上转动安装有不少于一个悬挂轮,所述安装板上设有驱动行走轮旋转的驱动机构,所述悬挂轮和行走轮分设在导向钢索的两侧,所述导向钢索经过悬挂轮和行走轮外缘设置的轮槽,所述基板的两侧均通过安装座固定安装有第二电机,所述第二电机的输出轴同轴连接有螺旋桨。本发明的机器人控制方便,能够按照