
一种电力巡检机器人.pdf

是立****92


1/8

2/8
3/8
4/8

5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种电力巡检机器人.pdf
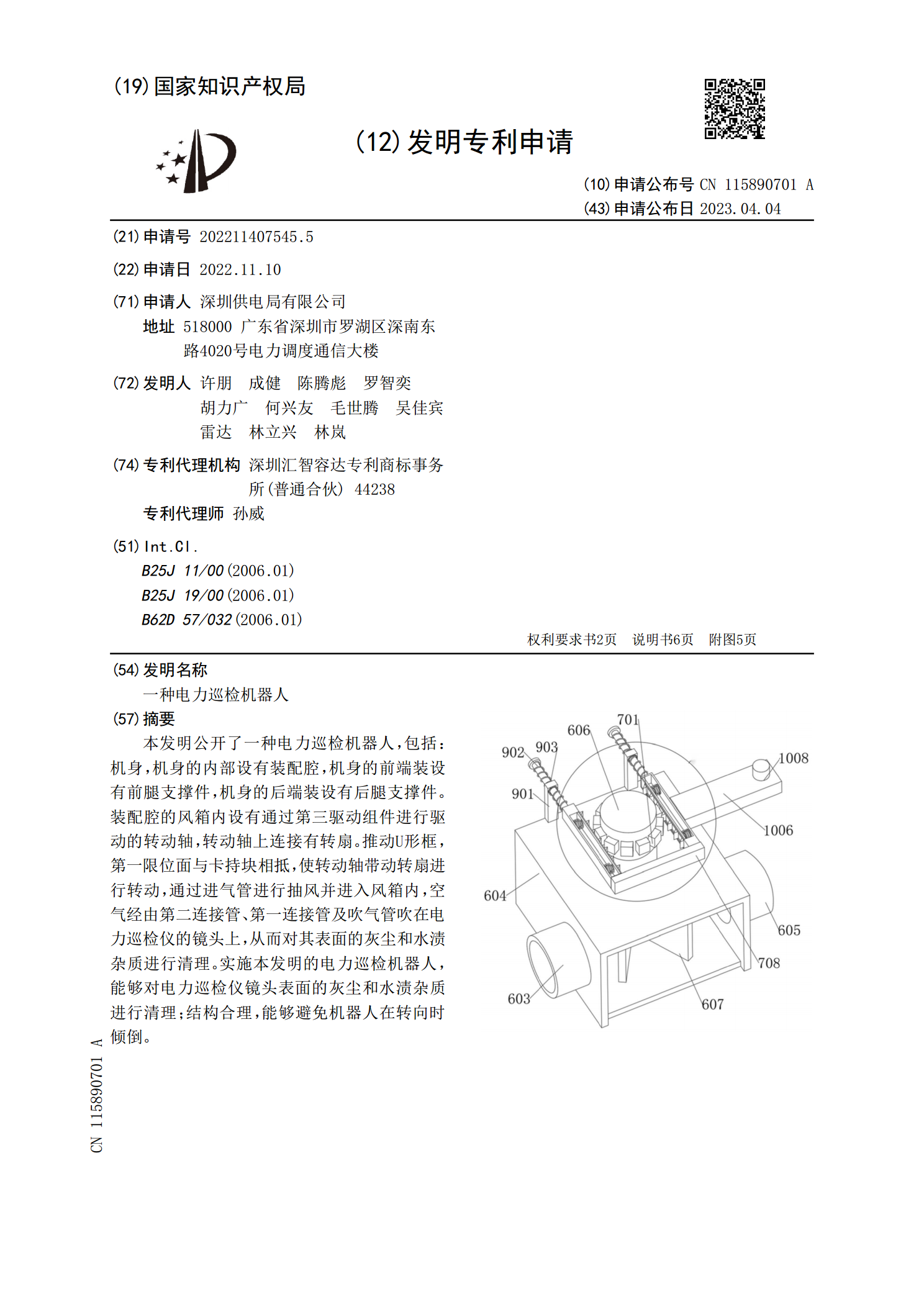
本发明公开了一种电力巡检机器人,包括:机身,机身的内部设有装配腔,机身的前端装设有前腿支撑件,机身的后端装设有后腿支撑件。装配腔的风箱内设有通过第三驱动组件进行驱动的转动轴,转动轴上连接有转扇。推动U形框,第一限位面与卡持块相抵,使转动轴带动转扇进行转动,通过进气管进行抽风并进入风箱内,空气经由第二连接管、第一连接管及吹气管吹在电力巡检仪的镜头上,从而对其表面的灰尘和水渍杂质进行清理。实施本发明的电力巡检机器人,能够对电力巡检仪镜头表面的灰尘和水渍杂质进行清理;结构合理,能够避免机器人在转向时倾倒。

一种电力巡检机器人.pdf
本发明公开了一种电力巡检机器人,包括壳体、底盘系统和云台,所述的底盘系统包括底盘架、前轮组件、后轮组件、悬挂机构和驱动机构,后轮组件通过悬挂机构安装在底盘架上,所述的悬挂机构包括固定设置在底盘架上的固定支撑架,固定支撑架铰接连接有摆臂构件,后轮组件包括一对后轮,后轮安装在摆臂构件上,摆臂构件与固定支撑架之间还连接有减震构件,后轮还连接所述的驱动机构;底盘架上还设置有控制电器件,控制电器件与驱动机构电连接;底盘架的前端部连接有激光雷达,云台中安装有高清日夜型相机和红外热像仪。本发明的电力巡检机器人,能够实现
一种电力巡检机器人.pdf
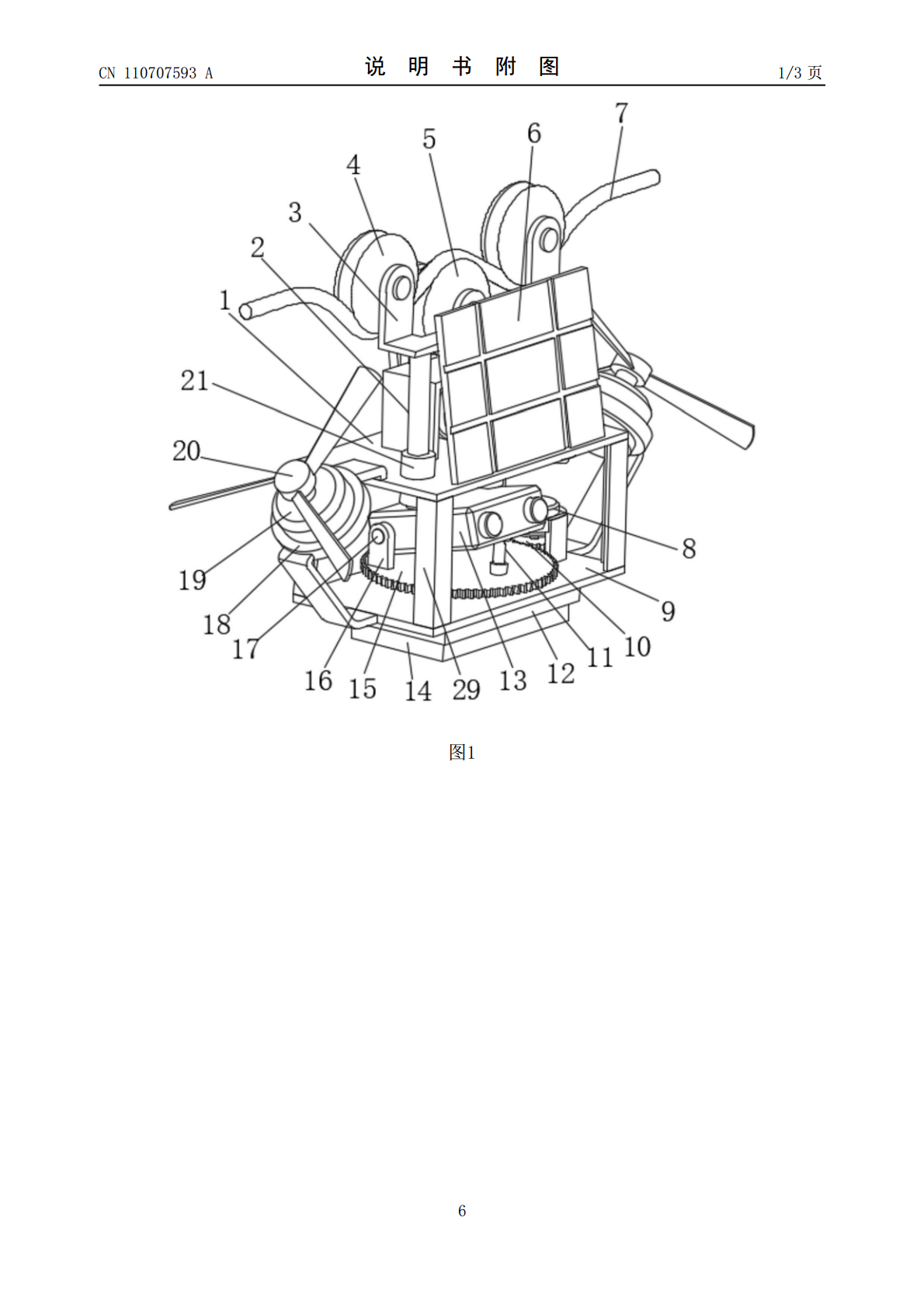
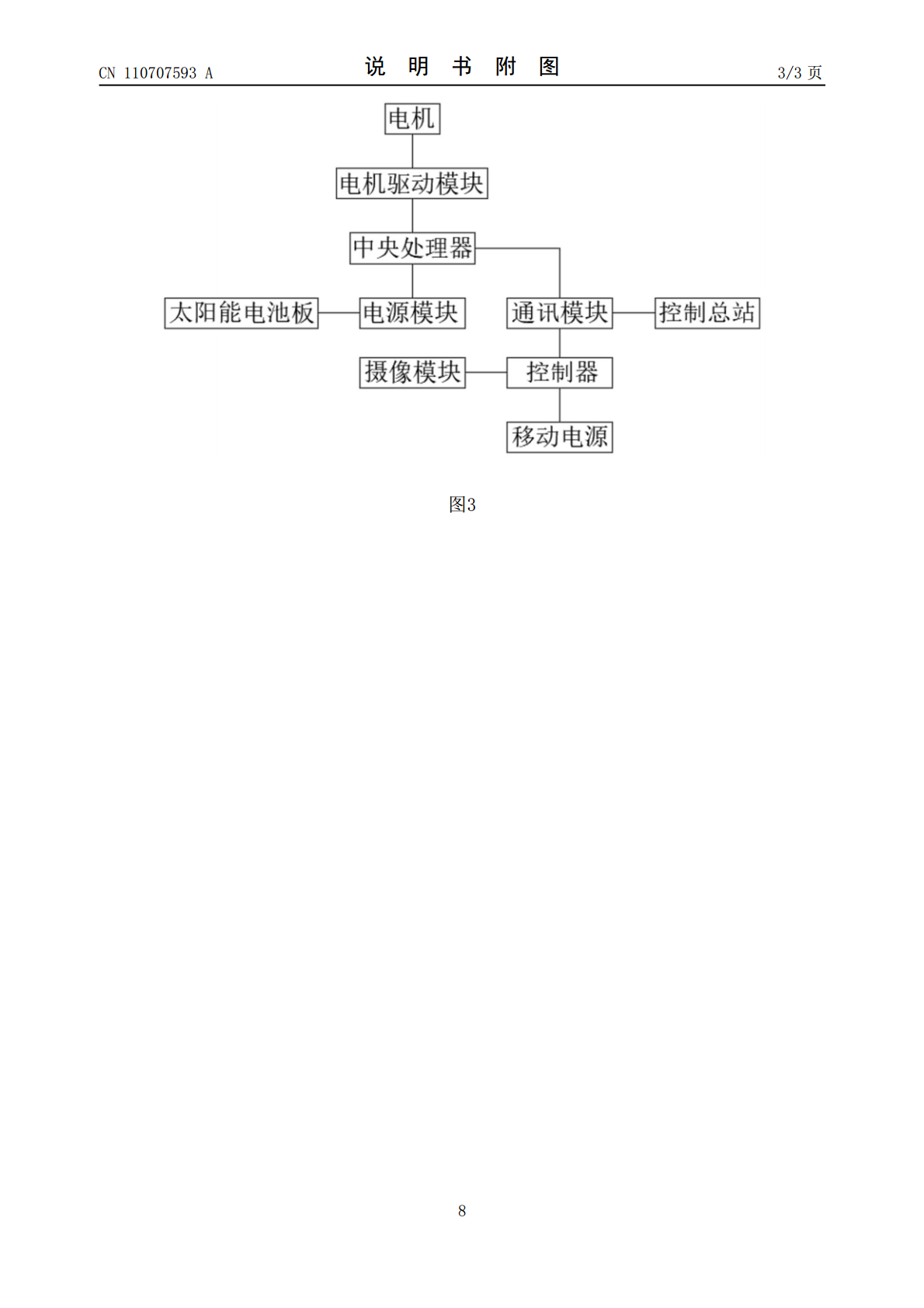
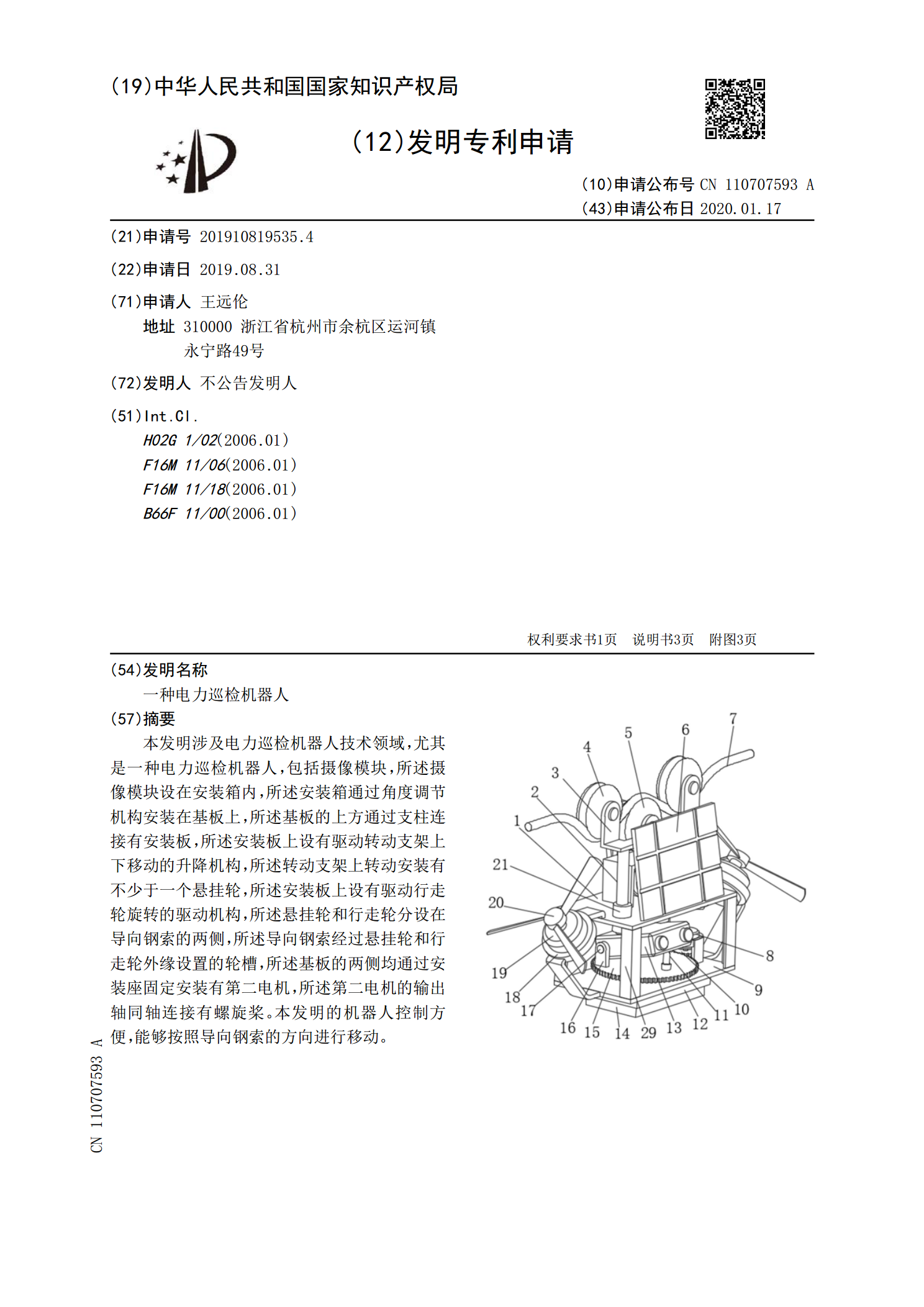
本发明涉及电力巡检机器人技术领域,尤其是一种电力巡检机器人,包括摄像模块,所述摄像模块设在安装箱内,所述安装箱通过角度调节机构安装在基板上,所述基板的上方通过支柱连接有安装板,所述安装板上设有驱动转动支架上下移动的升降机构,所述转动支架上转动安装有不少于一个悬挂轮,所述安装板上设有驱动行走轮旋转的驱动机构,所述悬挂轮和行走轮分设在导向钢索的两侧,所述导向钢索经过悬挂轮和行走轮外缘设置的轮槽,所述基板的两侧均通过安装座固定安装有第二电机,所述第二电机的输出轴同轴连接有螺旋桨。本发明的机器人控制方便,能够按照

一种电力巡检机器人.pdf
本发明公开的是一种电力巡检机器人,包括底盘,底盘上配合装设有四个驱动轮系,底盘的前、后两端分别装设有防碰撞开关,且防碰撞开关上装设有若干个防跌落传感器,底盘的上部配合装设有一安装平台,安装平台的前、后侧分别装设有前安装台和后安装台,该前安装台上固定装设有超声波雷达、激光雷达以及音箱,该后安装台上固定装设有一云台模块。本发明实现自动变电站巡视,各项标记抄录和智能分析,雨雪冰冻、雷雨天气等特巡,将承担事故处理的前期查勘等工作,能有效降低人工巡检劳动强度,降低变电站运维成本,提高巡检作业和管理的自动化和智能化水
一种电力巡检用机器人.pdf
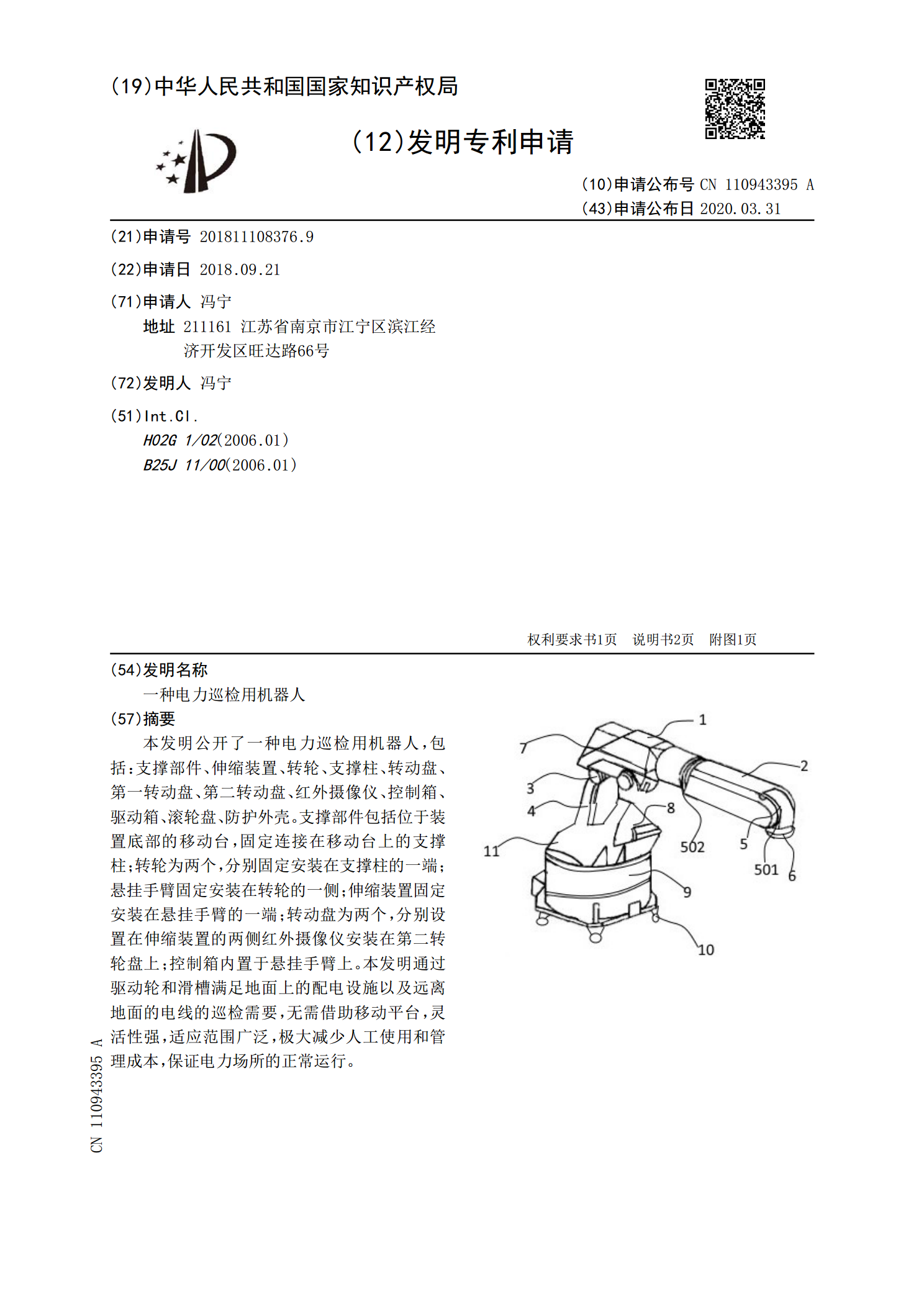
本发明公开了一种电力巡检用机器人,包括:支撑部件、伸缩装置、转轮、支撑柱、转动盘、第一转动盘、第二转动盘、红外摄像仪、控制箱、驱动箱、滚轮盘、防护外壳。支撑部件包括位于装置底部的移动台,固定连接在移动台上的支撑柱;转轮为两个,分别固定安装在支撑柱的一端;悬挂手臂固定安装在转轮的一侧;伸缩装置固定安装在悬挂手臂的一端;转动盘为两个,分别设置在伸缩装置的两侧红外摄像仪安装在第二转轮盘上;控制箱内置于悬挂手臂上。本发明通过驱动轮和滑槽满足地面上的配电设施以及远离地面的电线的巡检需要,无需借助移动平台,灵活性强,