
三维自由弯曲的管材轴线形状成形方法及装置.pdf

骊蓉****23


1/10

2/10

3/10

4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
三维自由弯曲的管材轴线形状成形方法及装置.pdf
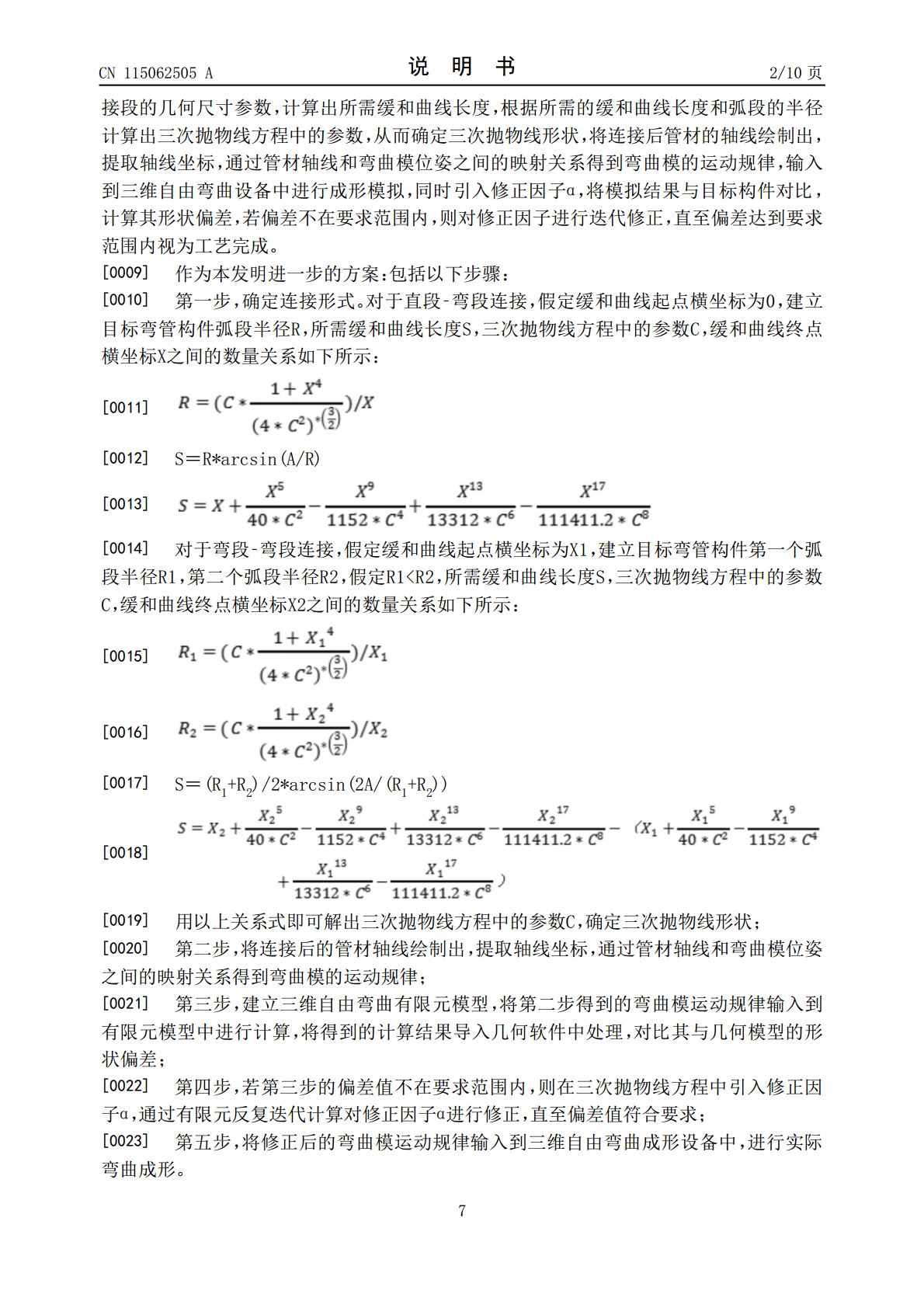
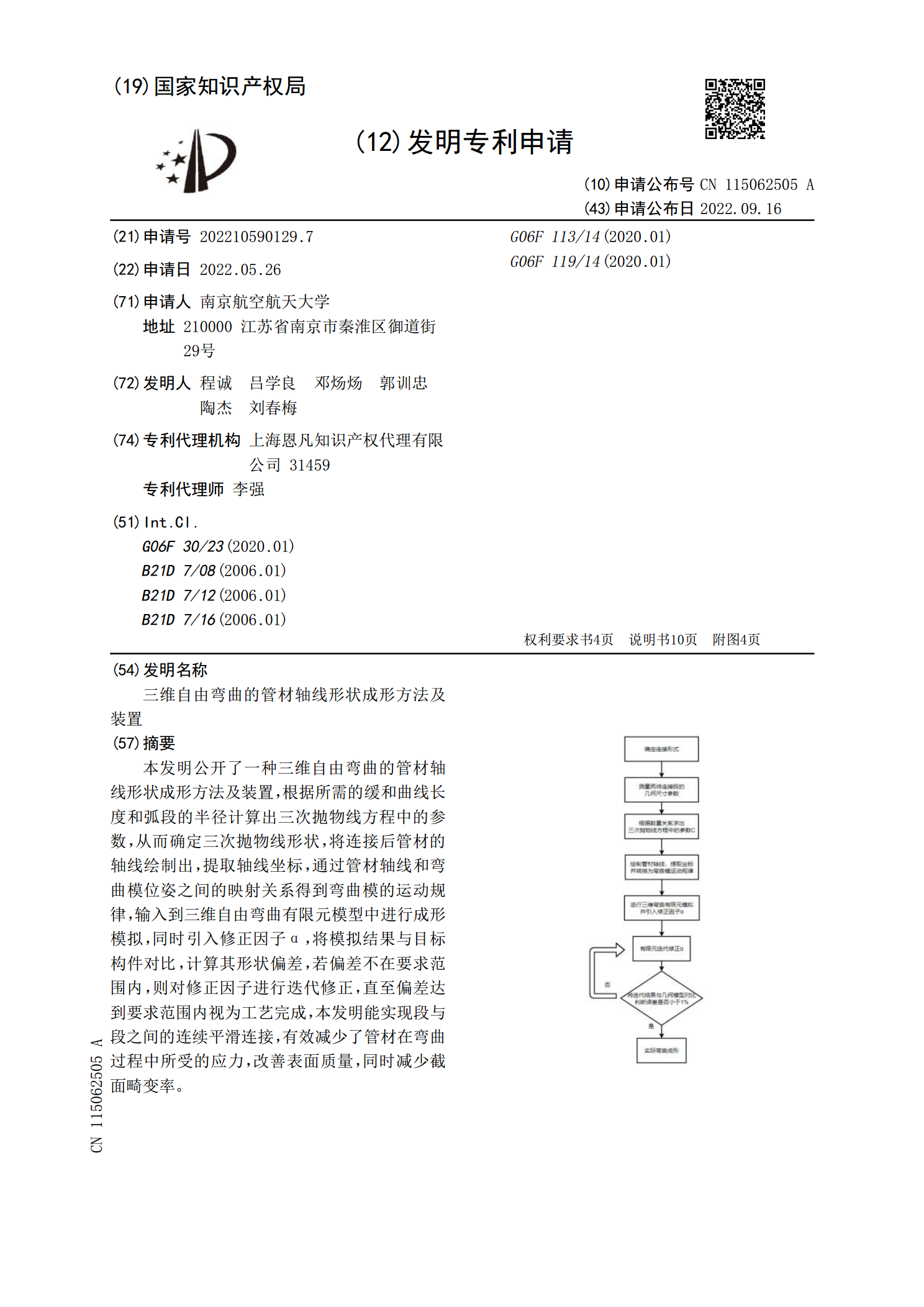
本发明公开了一种三维自由弯曲的管材轴线形状成形方法及装置,根据所需的缓和曲线长度和弧段的半径计算出三次抛物线方程中的参数,从而确定三次抛物线形状,将连接后管材的轴线绘制出,提取轴线坐标,通过管材轴线和弯曲模位姿之间的映射关系得到弯曲模的运动规律,输入到三维自由弯曲有限元模型中进行成形模拟,同时引入修正因子α,将模拟结果与目标构件对比,计算其形状偏差,若偏差不在要求范围内,则对修正因子进行迭代修正,直至偏差达到要求范围内视为工艺完成,本发明能实现段与段之间的连续平滑连接,有效减少了管材在弯曲过程中所受的应力
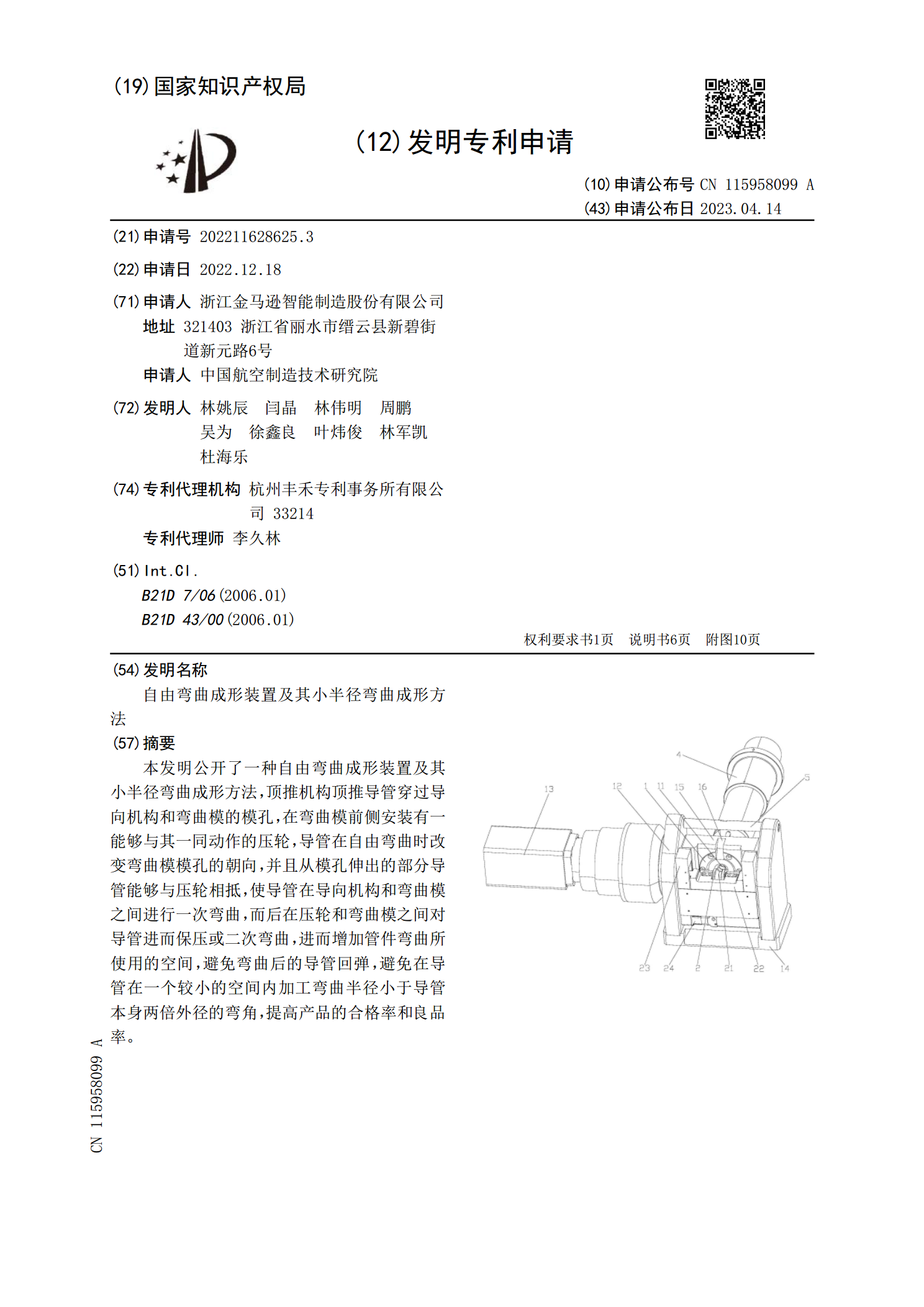
自由弯曲成形装置及其小半径弯曲成形方法.pdf
本发明公开了一种自由弯曲成形装置及其小半径弯曲成形方法,顶推机构顶推导管穿过导向机构和弯曲模的模孔,在弯曲模前侧安装有一能够与其一同动作的压轮,导管在自由弯曲时改变弯曲模模孔的朝向,并且从模孔伸出的部分导管能够与压轮相抵,使导管在导向机构和弯曲模之间进行一次弯曲,而后在压轮和弯曲模之间对导管进而保压或二次弯曲,进而增加管件弯曲所使用的空间,避免弯曲后的导管回弹,避免在导管在一个较小的空间内加工弯曲半径小于导管本身两倍外径的弯角,提高产品的合格率和良品率。

基于数值模拟的管材三维自由弯曲成形规律研究.docx
基于数值模拟的管材三维自由弯曲成形规律研究随着工业化和现代化的发展,管材的应用越来越广泛,尤其是在建筑、机械、电子、航空航天等领域得到广泛应用。一个管材的弯曲成形往往决定了它在工程中的使用价值和技术难度。因此,管材三维自由弯曲成形规律的研究对于工程建设和发展具有重要意义。本文主要基于数值模拟的方法,研究了管材三维自由弯曲成形的规律。首先,我们简要介绍了数值模拟的概念和方法,然后介绍了管材成形的基本原理和技术。接着,我们通过有限元方法进行数值模拟,模拟了管材的弯曲成形过程。最后,我们针对模拟结果进行了分析,
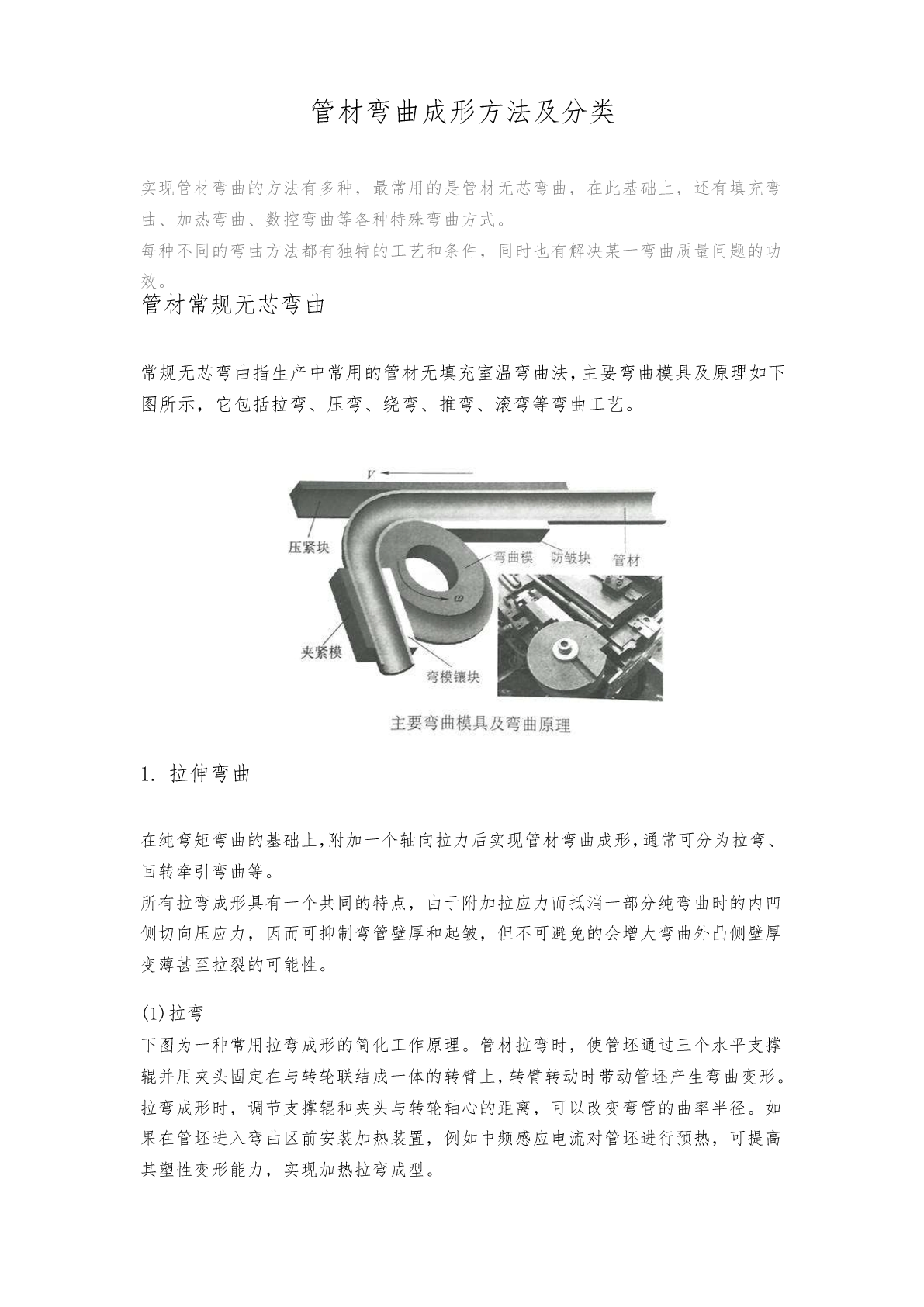
管材弯曲成形方法及分类.pdf
管材弯曲成形方法及分类实现管材弯曲的方法有多种,最常用的是管材无芯弯曲,在此基础上,还有填充弯曲、加热弯曲、数控弯曲等各种特殊弯曲方式。每种不同的弯曲方法都有独特的工艺和条件,同时也有解决某一弯曲质量问题的功效。管材常规无芯弯曲常规无芯弯曲指生产中常用的管材无填充室温弯曲法,主要弯曲模具及原理如下图所示,它包括拉弯、压弯、绕弯、推弯、滚弯等弯曲工艺。1.拉伸弯曲在纯弯矩弯曲的基础上,附加一个轴向拉力后实现管材弯曲成形,通常可分为拉弯、回转牵引弯曲等。所有拉弯成形具有一个共同的特点,由于附加拉应力而抵消一部
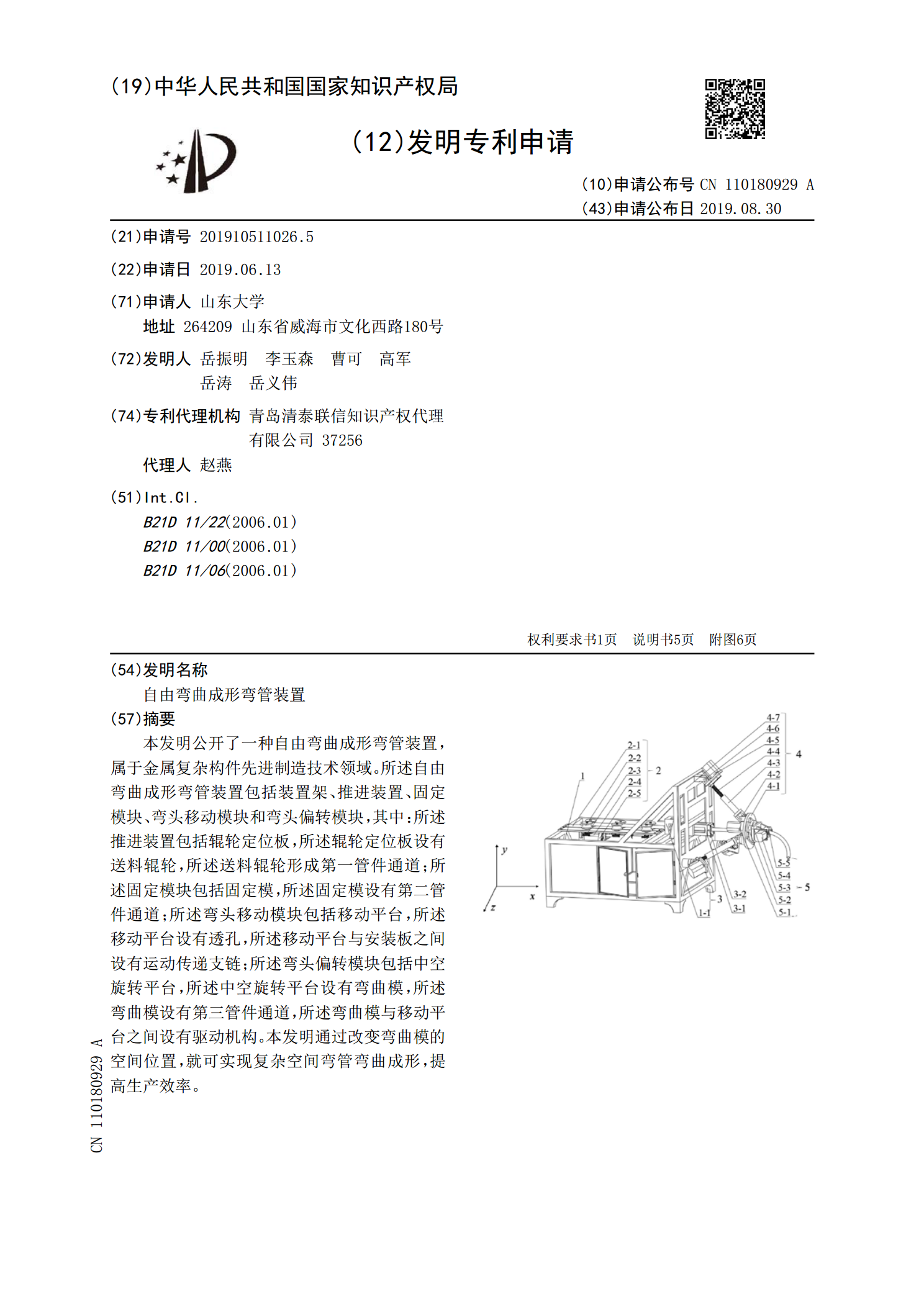
自由弯曲成形弯管装置.pdf
本发明公开了一种自由弯曲成形弯管装置,属于金属复杂构件先进制造技术领域。所述自由弯曲成形弯管装置包括装置架、推进装置、固定模块、弯头移动模块和弯头偏转模块,其中:所述推进装置包括辊轮定位板,所述辊轮定位板设有送料辊轮,所述送料辊轮形成第一管件通道;所述固定模块包括固定模,所述固定模设有第二管件通道;所述弯头移动模块包括移动平台,所述移动平台设有透孔,所述移动平台与安装板之间设有运动传递支链;所述弯头偏转模块包括中空旋转平台,所述中空旋转平台设有弯曲模,所述弯曲模设有第三管件通道,所述弯曲模与移动平台之间设