
基于动态作业目标的机器人作业路径动态规划方法及装置.pdf

含平****ng


1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于动态作业目标的机器人作业路径动态规划方法及装置.pdf
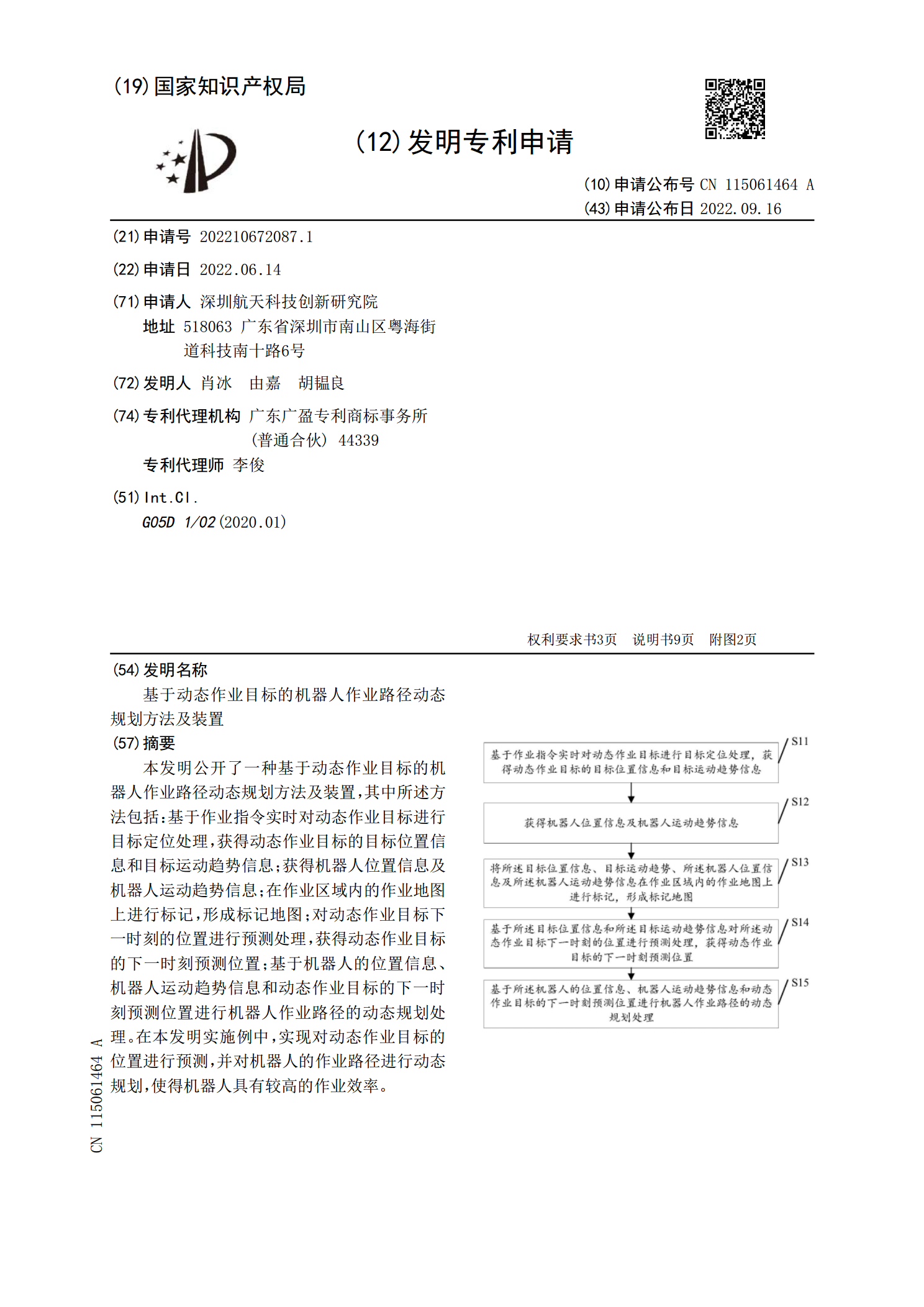
本发明公开了一种基于动态作业目标的机器人作业路径动态规划方法及装置,其中所述方法包括:基于作业指令实时对动态作业目标进行目标定位处理,获得动态作业目标的目标位置信息和目标运动趋势信息;获得机器人位置信息及机器人运动趋势信息;在作业区域内的作业地图上进行标记,形成标记地图;对动态作业目标下一时刻的位置进行预测处理,获得动态作业目标的下一时刻预测位置;基于机器人的位置信息、机器人运动趋势信息和动态作业目标的下一时刻预测位置进行机器人作业路径的动态规划处理。在本发明实施例中,实现对动态作业目标的位置进行预测,并

机器人路径动态规划.doc
研究背景近年来,机器人技术飞速发展,机器人的应用领域也在不断扩展。机器人的工作环境存在高度的多变性和复杂性,因此自主导航是实现真正智能化和完全自主移动的关键技术。机器人的导航问题可以归结为对“我在哪”、“我要去哪”以及“我如何到达那里”三个问题的回答。第三个问题就是路径规划,要求机器人在当前位置与目标位置之间寻找一条安全、合理、高效的路径,保证机器人能够安全地到达目标地点。机器人路径规划是机器人领域的一个研究热点。课题应用机器人的路径规划是机器人学的一个重要研究领域,是人工智能和机器人学的一个结合点。对于
动态路径规划的方法及装置.pdf
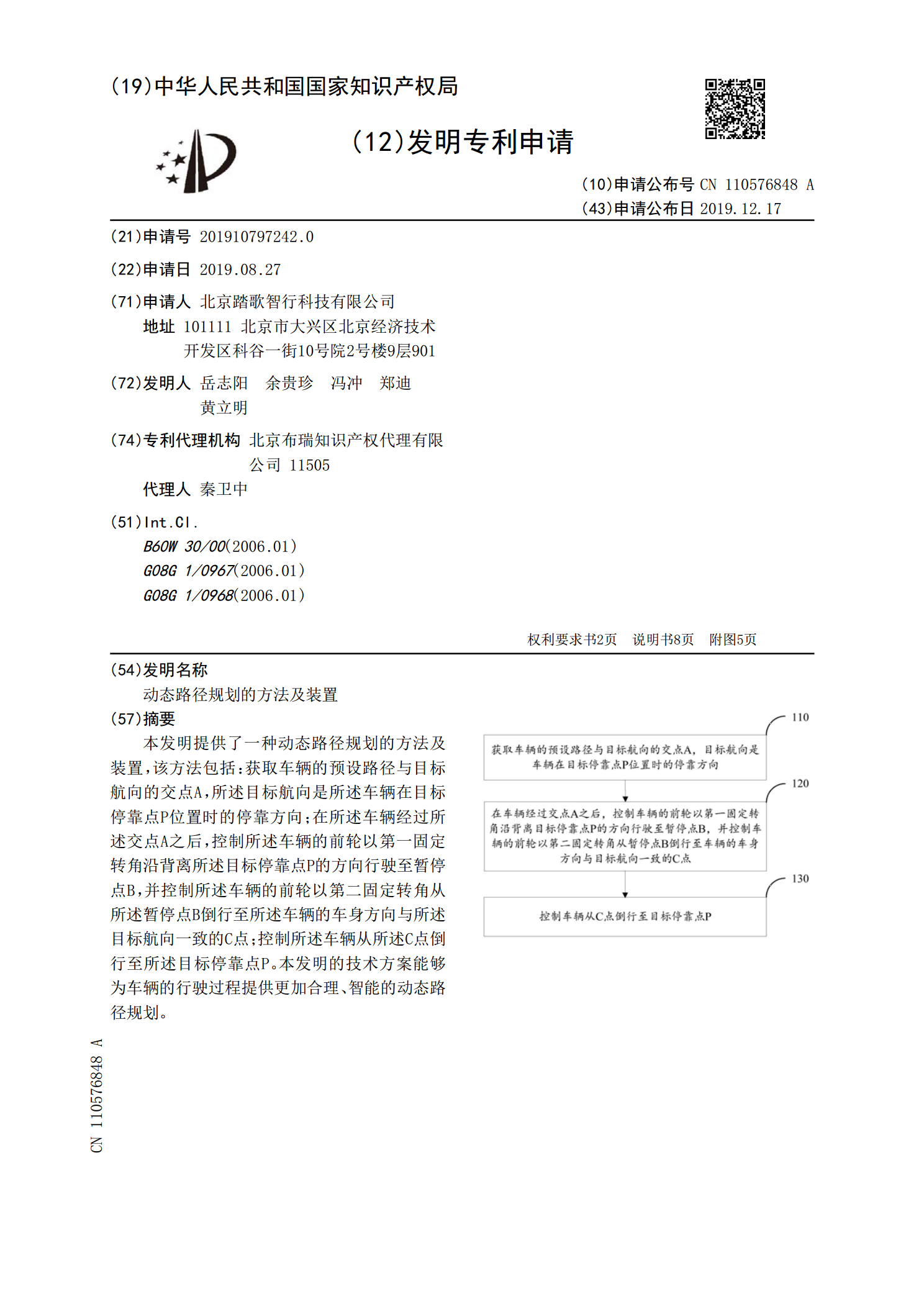
本发明提供了一种动态路径规划的方法及装置,该方法包括:获取车辆的预设路径与目标航向的交点A,所述目标航向是所述车辆在目标停靠点P位置时的停靠方向;在所述车辆经过所述交点A之后,控制所述车辆的前轮以第一固定转角沿背离所述目标停靠点P的方向行驶至暂停点B,并控制所述车辆的前轮以第二固定转角从所述暂停点B倒行至所述车辆的车身方向与所述目标航向一致的C点;控制所述车辆从所述C点倒行至所述目标停靠点P。本发明的技术方案能够为车辆的行驶过程提供更加合理、智能的动态路径规划。

一种基于动态优化算法的动态车辆路径规划方法.pdf
本发明提出了一种基于动态优化算法的动态路径规划方法,包括:动态车辆路径问题的描述以及约束条件,动态车辆规划方法的实现流程和具体实施方式。根据专利要求书1所述的基于动态优化算法的动态路径规划方法,其特征在于1)对当前时刻和上一时刻的非支配解集进行分区,分别对每个分区采用前馈中心点算法预测下一时刻的非支配集。2)通过非支配解集与结构化参考点之间的联系算法,筛选出多样性好的个体,选择非支配解集中收敛性好的拐点,两者统称为特殊点,3)对当前时刻和上一时刻的特殊点采用逐步搜索策略,预测下一时刻的特殊点。4)自适应的

动态规划作业完整.doc
动态规划作业1、设某工厂自国外进口一部精密机器,由机器制造厂至出口港有三个港口可供选择,而进口港又有三个可供选择,进口后可经由两个城市到达目的地,其间的运送成本如图中所标的数字,试求运费最低的路线?把A看作终点,该问题可分为4个阶段。fk(Sk)表达从第K阶段点Sk到终点A的最短距离。f4(B1)=20,f4(B2)=40,f4(B3)=30f3(C1)=min[d3(C1,B1)+f4(B1),d3(C1,B2)+f4(B2),d3(C1,B3)+f4(B3)]=70,U3(C1)=B2或B3f3(C2