
机器人路径动态规划.doc

yy****24


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机器人路径动态规划.doc
研究背景近年来,机器人技术飞速发展,机器人的应用领域也在不断扩展。机器人的工作环境存在高度的多变性和复杂性,因此自主导航是实现真正智能化和完全自主移动的关键技术。机器人的导航问题可以归结为对“我在哪”、“我要去哪”以及“我如何到达那里”三个问题的回答。第三个问题就是路径规划,要求机器人在当前位置与目标位置之间寻找一条安全、合理、高效的路径,保证机器人能够安全地到达目标地点。机器人路径规划是机器人领域的一个研究热点。课题应用机器人的路径规划是机器人学的一个重要研究领域,是人工智能和机器人学的一个结合点。对于

机器人动态路径规划与协作路径规划研究的开题报告.docx
机器人动态路径规划与协作路径规划研究的开题报告一、选题背景随着机器人技术的发展,机器人在工业、服务机器人、医疗机器人等领域的应用越来越广泛,机器人的使用也更加普及。机器人路径规划是机器人控制中的重要问题,机器人需要能够自主规划路径,以实现移动、操作、任务等功能。目前,机器人路径规划主要可以按照静态路径规划、动态路径规划和协作路径规划来划分。静态路径规划是指确定一个确定的路径,机器人沿着这个路径行走,不考虑环境变化等因素;动态路径规划则是在运动过程中根据当前情况动态调整路径,适应环境变化;协作路径规划则是多

机器人动态路径规划与协作路径规划研究的任务书.docx
机器人动态路径规划与协作路径规划研究的任务书任务书1.任务背景随着机器人技术的不断发展,机器人在各个领域中的应用不断扩大,其中路径规划是机器人技术中的重要研究方向。机器人路径规划一般包括静态路径规划和动态路径规划两种类型。静态路径规划是指规划一条不动的路径,以实现机器人的从起点到终点的任务,而动态路径规划则是机器人需要在即时变化的环境中规划路径以保证其安全性和效率性。在实际应用过程中,通常需要多个机器人进行协同工作,然而,在多机器人协同工作场景中,路径规划会变得更加复杂,因此需要对机器人间协作路径规划进行
基于动态作业目标的机器人作业路径动态规划方法及装置.pdf
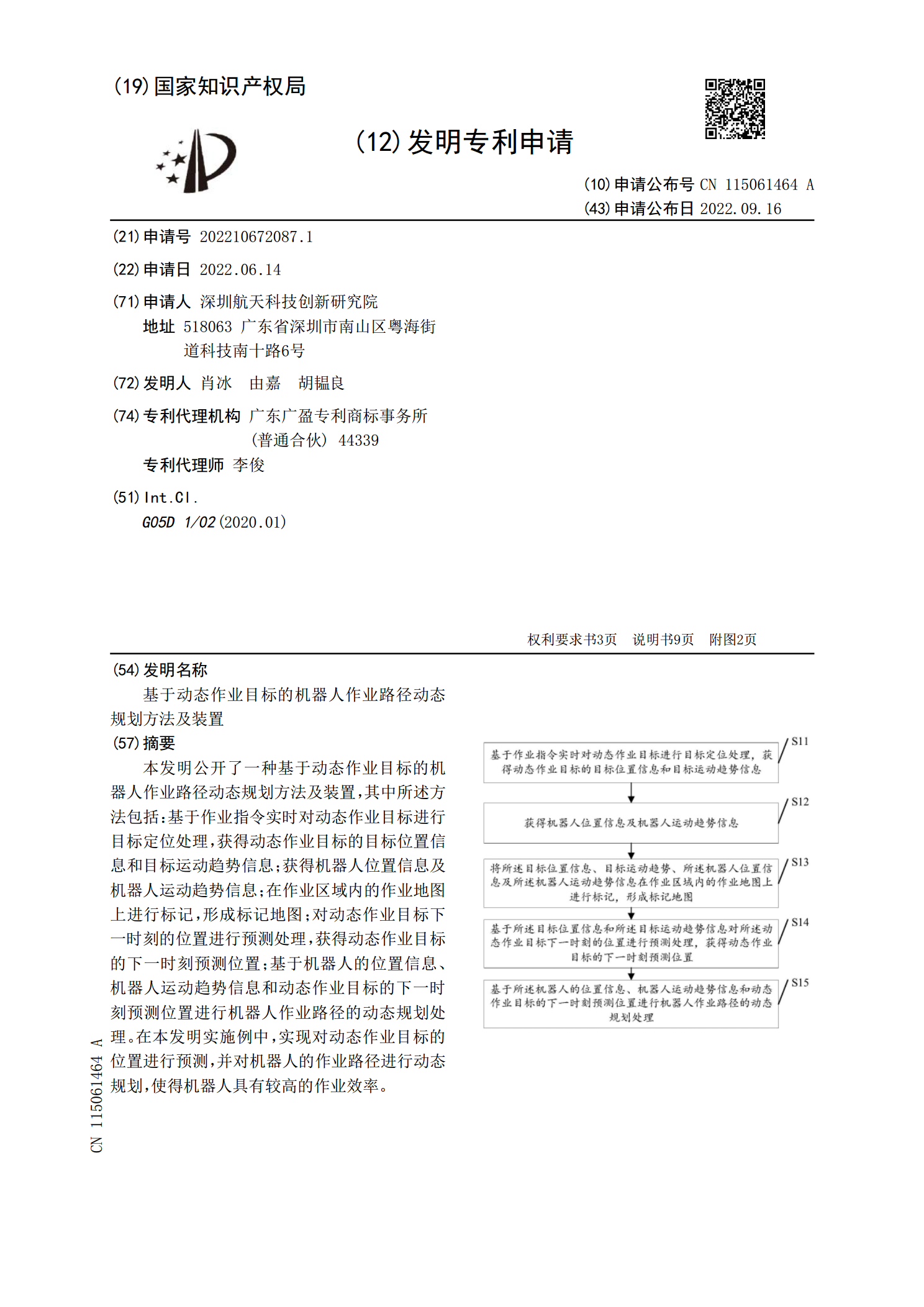
本发明公开了一种基于动态作业目标的机器人作业路径动态规划方法及装置,其中所述方法包括:基于作业指令实时对动态作业目标进行目标定位处理,获得动态作业目标的目标位置信息和目标运动趋势信息;获得机器人位置信息及机器人运动趋势信息;在作业区域内的作业地图上进行标记,形成标记地图;对动态作业目标下一时刻的位置进行预测处理,获得动态作业目标的下一时刻预测位置;基于机器人的位置信息、机器人运动趋势信息和动态作业目标的下一时刻预测位置进行机器人作业路径的动态规划处理。在本发明实施例中,实现对动态作业目标的位置进行预测,并

多机器人系统的动态路径规划方法研究的任务书.docx
多机器人系统的动态路径规划方法研究的任务书任务书项目背景多机器人系统在工业自动化、协作探索、环境监测等领域应用广泛,其具有高效性、鲁棒性和全局优化的特点。在多机器人系统中,路径规划是一项重要任务,它能够有效提高系统的运行效率和可靠性。传统的路径规划方法无法满足多机器人系统的要求,因此需要更为高效、智能的动态路径规划方法。项目任务本项目旨在研究多机器人系统的动态路径规划方法,主要任务如下:1.研究多机器人系统的运动学模型,建立机器人运动模型和环境模型。2.研发适用于多机器人系统的路径规划算法,包括基于规划框