
动态路径规划的方法及装置.pdf

甲申****66


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
动态路径规划的方法及装置.pdf
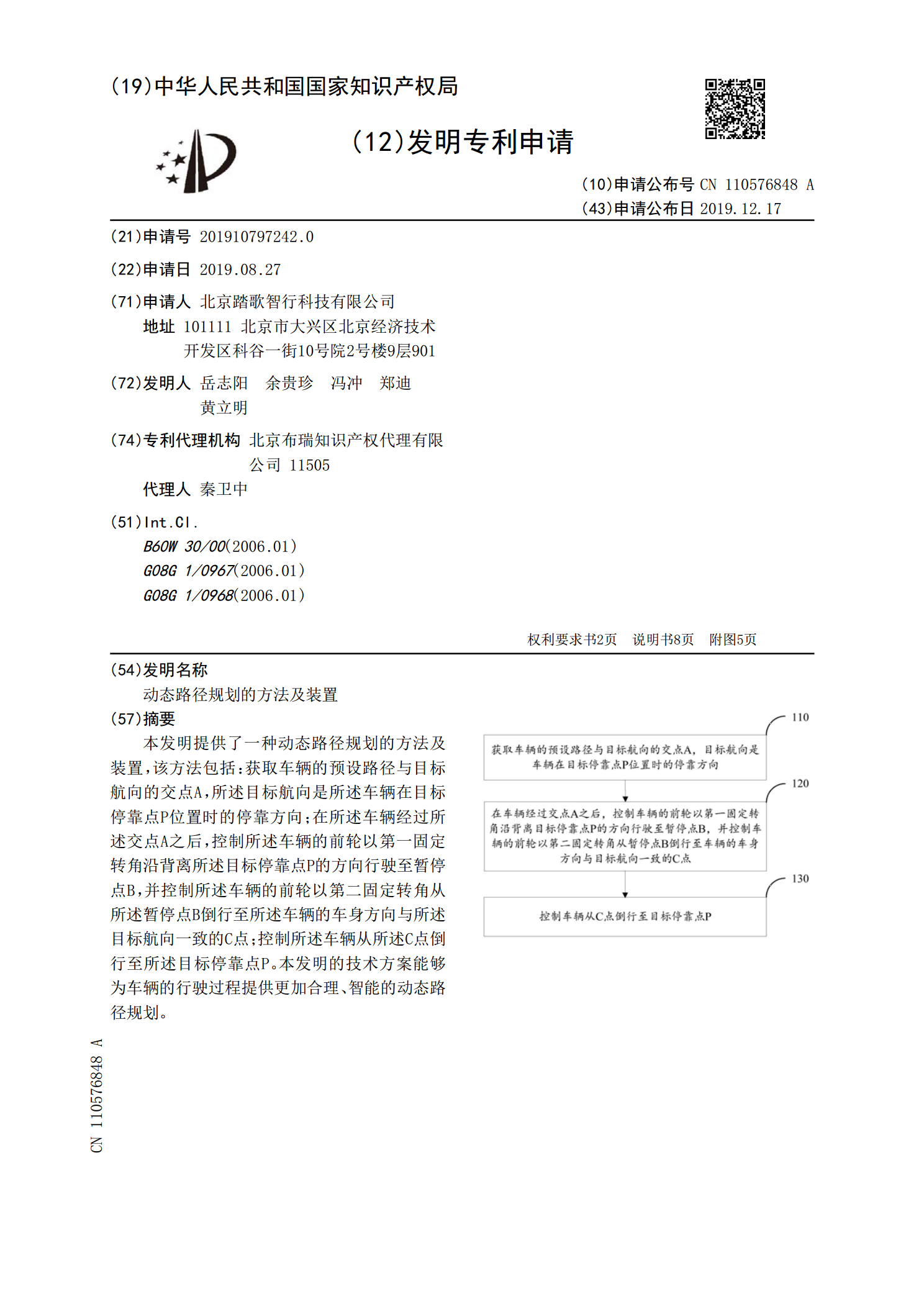
本发明提供了一种动态路径规划的方法及装置,该方法包括:获取车辆的预设路径与目标航向的交点A,所述目标航向是所述车辆在目标停靠点P位置时的停靠方向;在所述车辆经过所述交点A之后,控制所述车辆的前轮以第一固定转角沿背离所述目标停靠点P的方向行驶至暂停点B,并控制所述车辆的前轮以第二固定转角从所述暂停点B倒行至所述车辆的车身方向与所述目标航向一致的C点;控制所述车辆从所述C点倒行至所述目标停靠点P。本发明的技术方案能够为车辆的行驶过程提供更加合理、智能的动态路径规划。
基于动态作业目标的机器人作业路径动态规划方法及装置.pdf
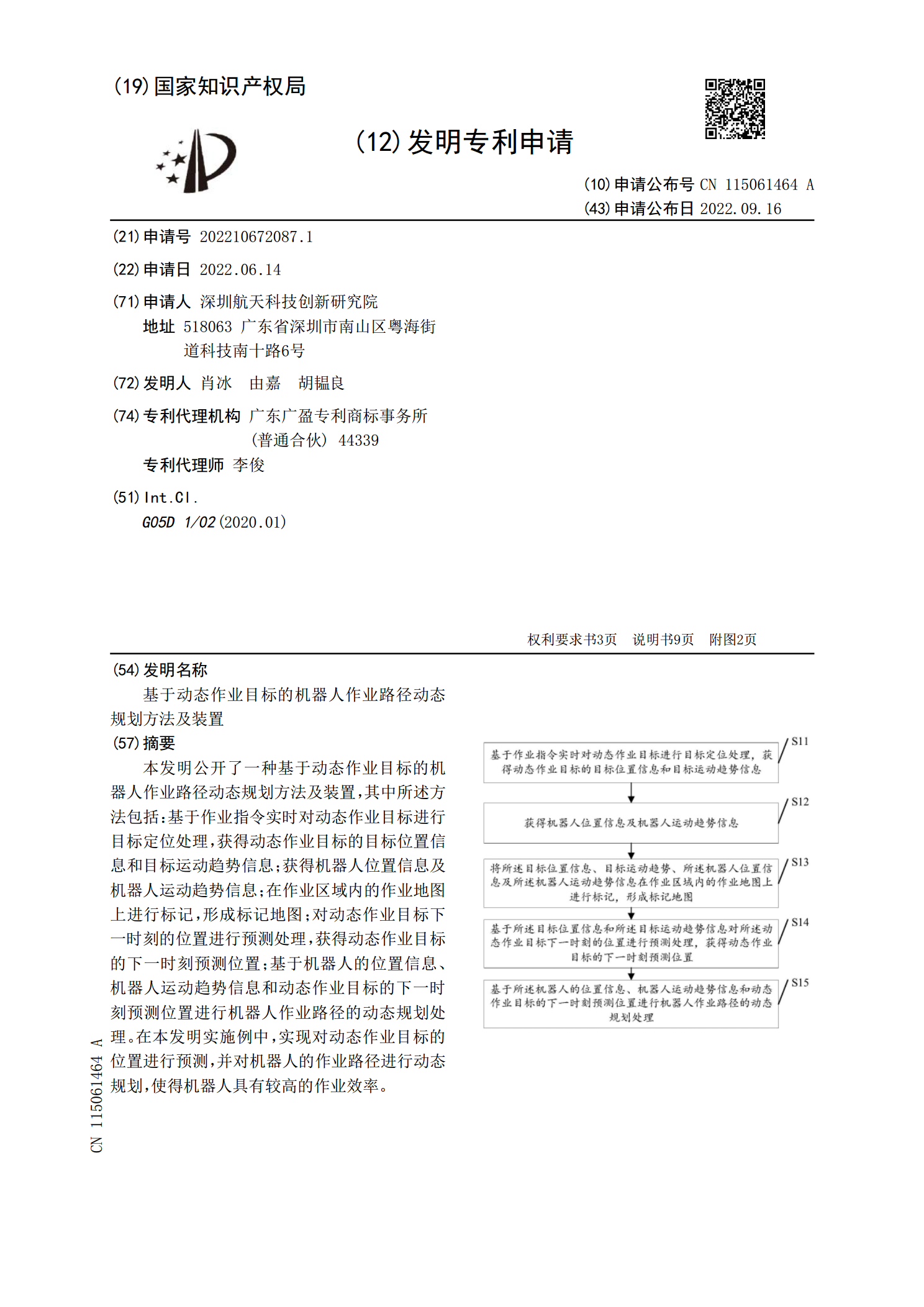
本发明公开了一种基于动态作业目标的机器人作业路径动态规划方法及装置,其中所述方法包括:基于作业指令实时对动态作业目标进行目标定位处理,获得动态作业目标的目标位置信息和目标运动趋势信息;获得机器人位置信息及机器人运动趋势信息;在作业区域内的作业地图上进行标记,形成标记地图;对动态作业目标下一时刻的位置进行预测处理,获得动态作业目标的下一时刻预测位置;基于机器人的位置信息、机器人运动趋势信息和动态作业目标的下一时刻预测位置进行机器人作业路径的动态规划处理。在本发明实施例中,实现对动态作业目标的位置进行预测,并
动态环境下的多智能体路径规划方法、装置、设备及介质.pdf
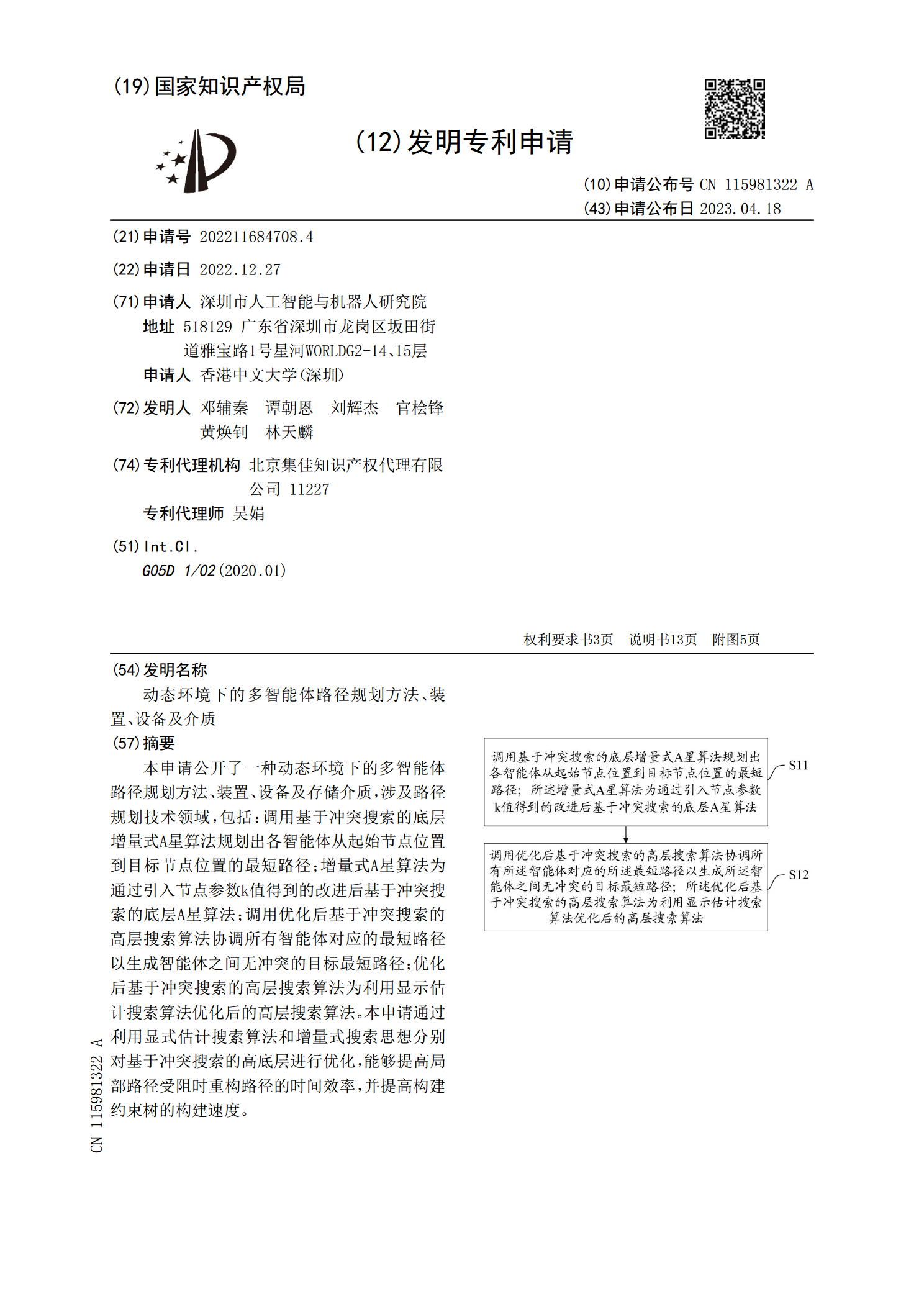
本申请公开了一种动态环境下的多智能体路径规划方法、装置、设备及存储介质,涉及路径规划技术领域,包括:调用基于冲突搜索的底层增量式A星算法规划出各智能体从起始节点位置到目标节点位置的最短路径;增量式A星算法为通过引入节点参数k值得到的改进后基于冲突搜索的底层A星算法;调用优化后基于冲突搜索的高层搜索算法协调所有智能体对应的最短路径以生成智能体之间无冲突的目标最短路径;优化后基于冲突搜索的高层搜索算法为利用显示估计搜索算法优化后的高层搜索算法。本申请通过利用显式估计搜索算法和增量式搜索思想分别对基于冲突搜索的
路径规划方法及装置.pdf
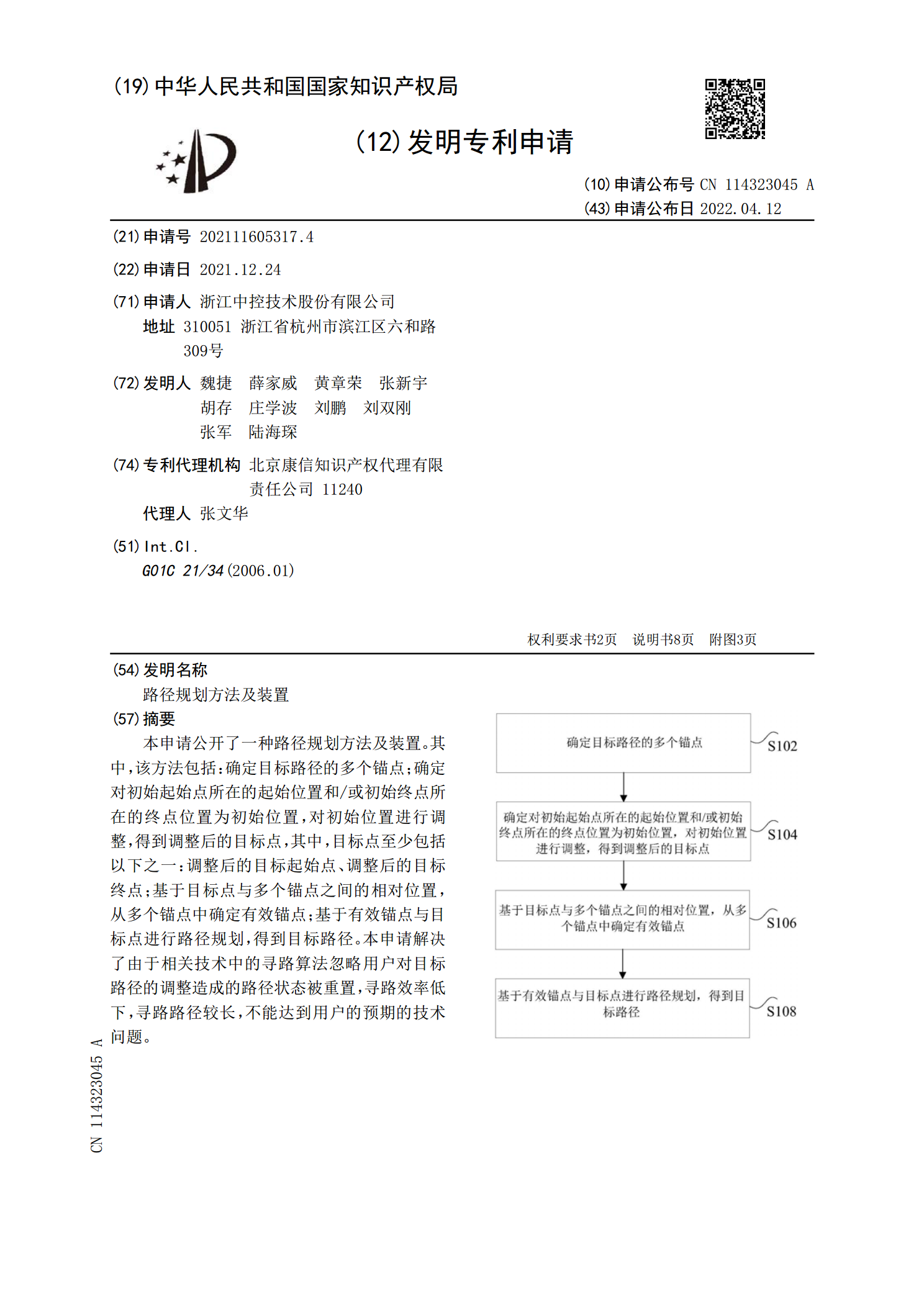
本申请公开了一种路径规划方法及装置。其中,该方法包括:确定目标路径的多个锚点;确定对初始起始点所在的起始位置和/或初始终点所在的终点位置为初始位置,对初始位置进行调整,得到调整后的目标点,其中,目标点至少包括以下之一:调整后的目标起始点、调整后的目标终点;基于目标点与多个锚点之间的相对位置,从多个锚点中确定有效锚点;基于有效锚点与目标点进行路径规划,得到目标路径。本申请解决了由于相关技术中的寻路算法忽略用户对目标路径的调整造成的路径状态被重置,寻路效率低下,寻路路径较长,不能达到用户的预期的技术问题。

路径规划方法及装置.pdf
本发明公开了一种路径规划方法及装置。其中,该方法包括:确定栅格地图,其中,栅格地图是对机器人的运行地图进行栅格划分后得到的地图,栅格地图中包括多个栅格;获取栅格临时占用表,其中,栅格临时占用表用于存放栅格的坐标信息和每个机器人在不同时刻对栅格的占用信息;依据栅格临时占用表,确定机器人从起点到达目标点的目标行进路径,其中,目标行进路径至少包括:到达每个栅格的时间以及在栅格的停留时长。本发明解决了相关技术中无法解决多个机器人在地图上行走时容易发生碰撞的技术问题。