
一种机械臂的自动避障方法及装置.pdf

冷霜****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机械臂的自动避障方法及装置.pdf
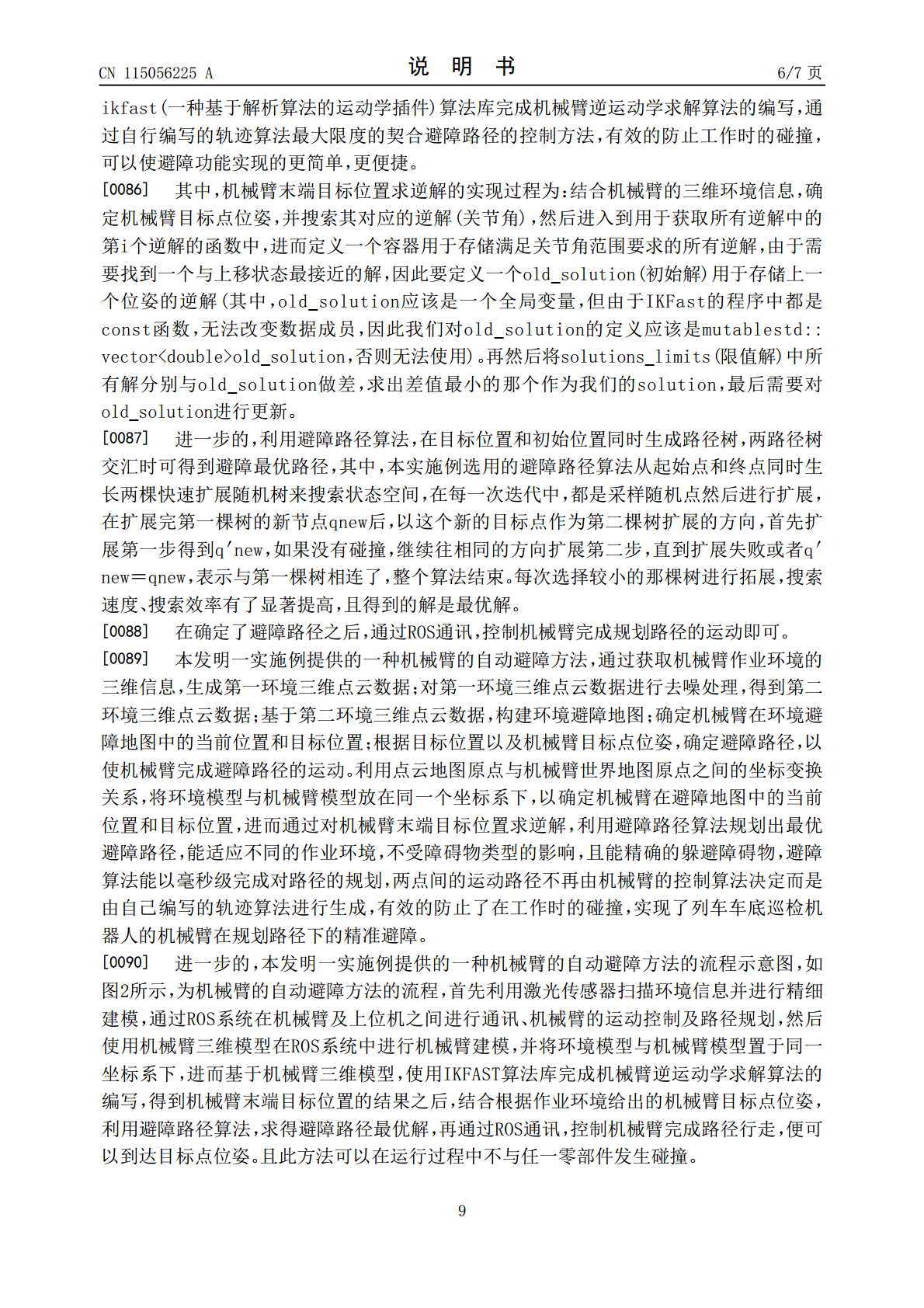
本发明公开了一种机械臂的自动避障方法及装置,通过获取机械臂作业环境的三维信息,生成第一环境三维点云数据;对所述第一环境三维点云数据进行去噪处理,得到第二环境三维点云数据;基于所述第二环境三维点云数据,构建环境避障地图;确定所述机械臂在所述环境避障地图中的当前位置和目标位置;根据所述目标位置以及机械臂目标点位姿,确定避障路径,以使所述机械臂从当前位置沿避障路径移动到目标位置。使得机械臂能适应不同的作业环境,不受障碍物类型的影响,实现对障碍物的精准躲避,且两点间的运动路径不再由机械臂的控制算法决定而是由自己编
机械臂的避障方法及避障系统.pdf
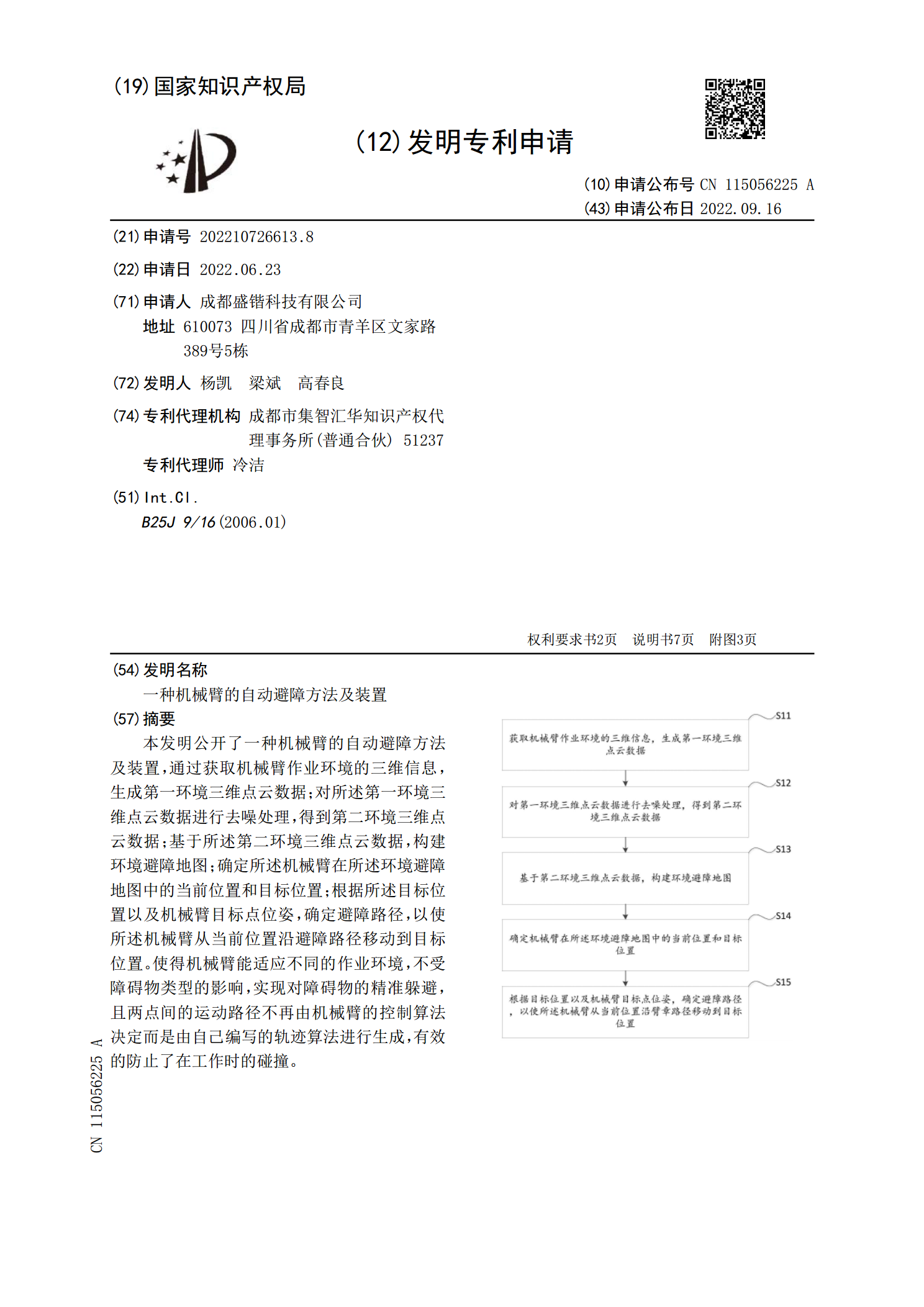
本发明公开了一种机械臂的避障方法及避障系统。机械臂的避障方法包括步骤:采集障碍物的图像信息,及采集机械臂与该障碍物的距离信息;分析该障碍物的图像信息及该距离信息以判断是否有新障碍物出现在该机械臂的预设范围内;若有该新障碍物出现在该机械臂的预设范围内,重新规划该机械臂的运行路径并按照重新规划的该运行路径控制该机械臂运动;若无该新障碍物出现在该机械臂的预设范围内,控制该机械臂以原来的运行路径运动。上述机械臂的避障方法,通过图像信息及距离信息判断是否有新障碍物出现,可以解决单纯视觉识别障碍物方法中存在盲区的缺点
避障方法及装置、自动导航装置.pdf
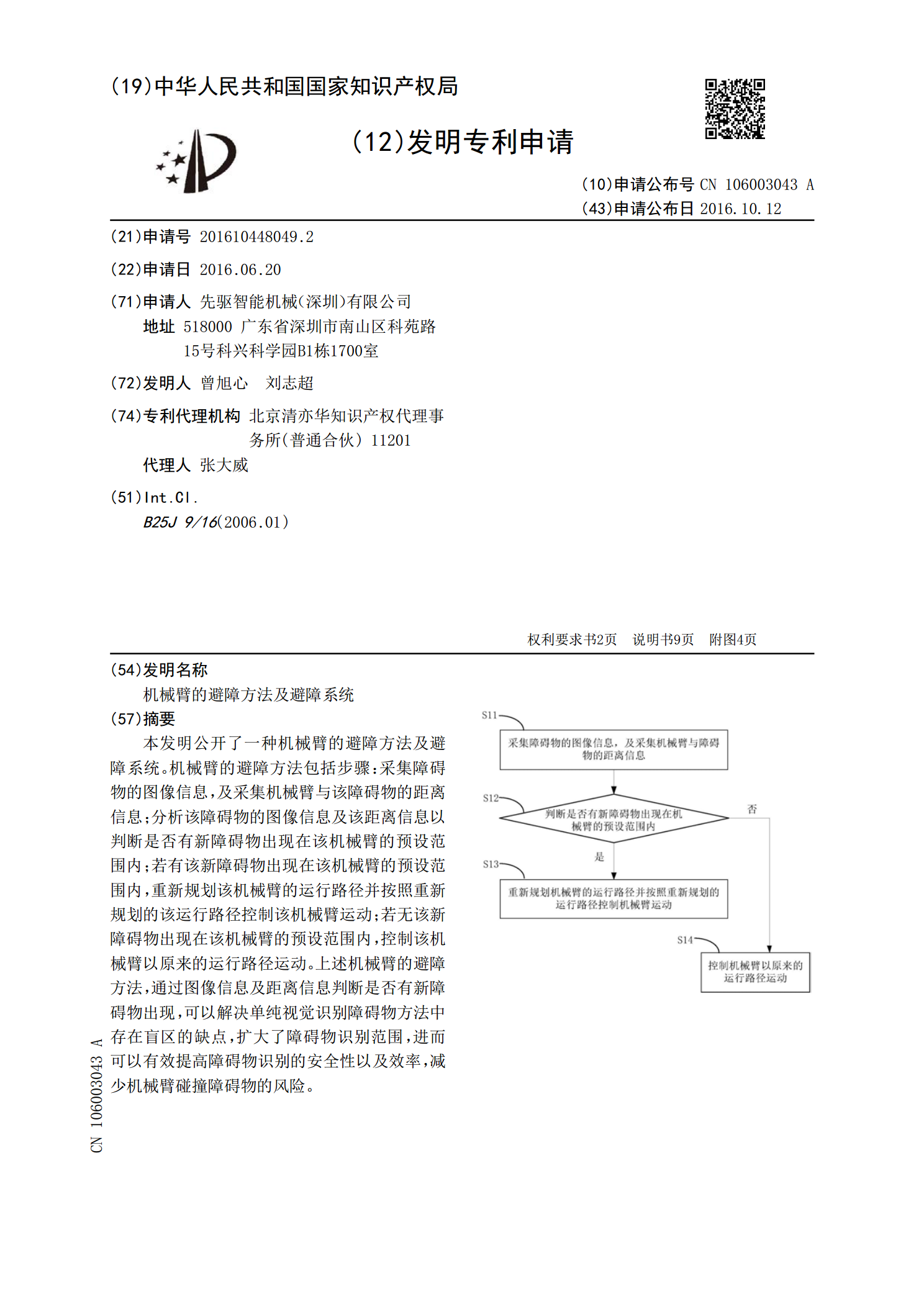
本申请提供一种避障方法及装置、自动导航装置,应用于机器人领域,其中,避障方法包括:获取自动导航装置的运动状态以及自动导航装置行驶路线上的障碍物信息;其中,障碍物信息包括障碍物运动状态以及障碍物属性;根据自动导航装置的运动状态以及障碍物信息确定自动导航装置对应的避障策略。在上述方案中,自动导航装置在避障的过程中,会综合考虑自身的运动状态以及障碍物的障碍物运动状态和障碍物属性,从而更准确的进行避障,避免出现危险。
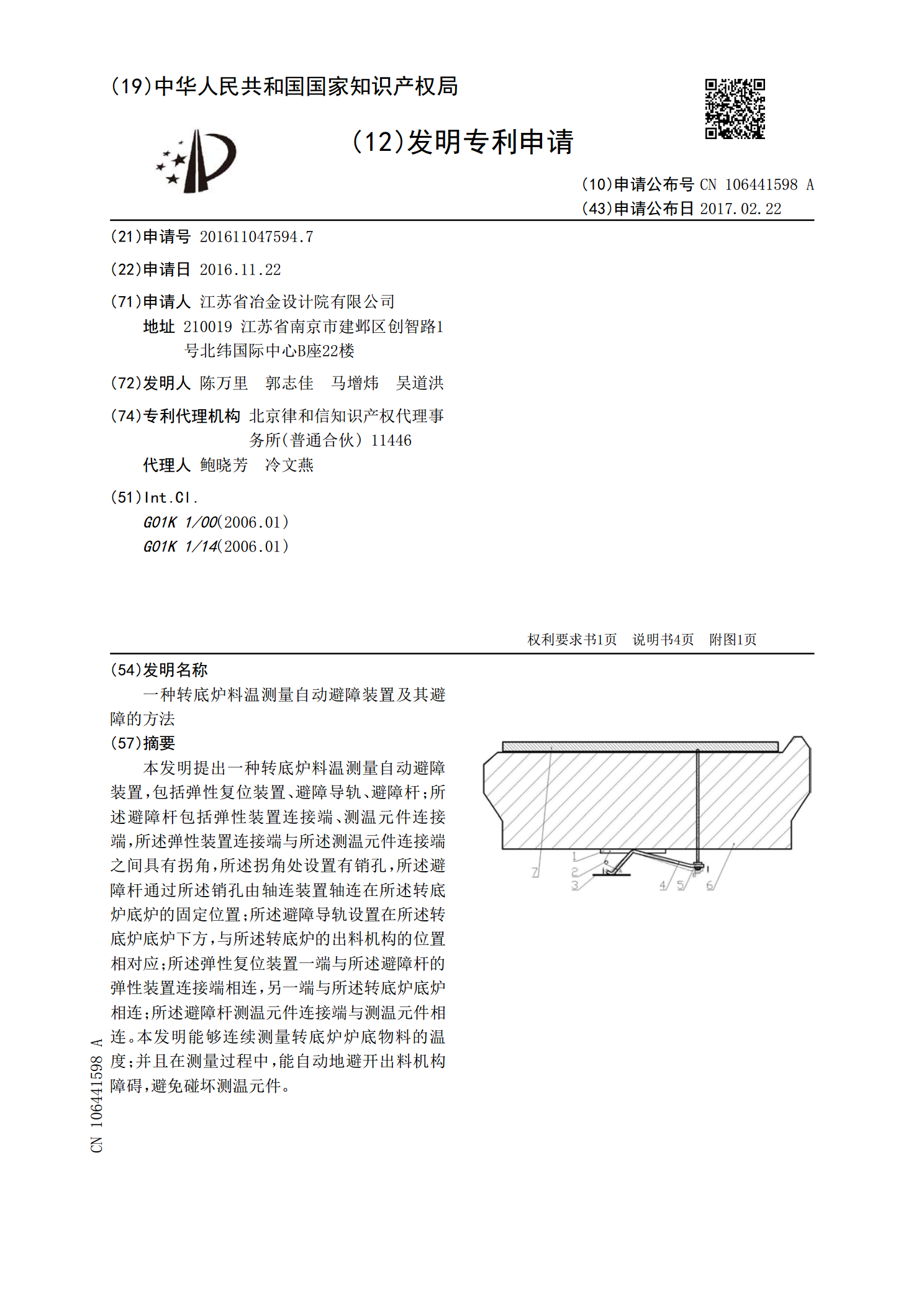
一种转底炉料温测量自动避障装置及其避障的方法.pdf
本发明提出一种转底炉料温测量自动避障装置,包括弹性复位装置、避障导轨、避障杆;所述避障杆包括弹性装置连接端、测温元件连接端,所述弹性装置连接端与所述测温元件连接端之间具有拐角,所述拐角处设置有销孔,所述避障杆通过所述销孔由轴连装置轴连在所述转底炉底炉的固定位置;所述避障导轨设置在所述转底炉底炉下方,与所述转底炉的出料机构的位置相对应;所述弹性复位装置一端与所述避障杆的弹性装置连接端相连,另一端与所述转底炉底炉相连;所述避障杆测温元件连接端与测温元件相连。本发明能够连续测量转底炉炉底物料的温度;并且在测量过
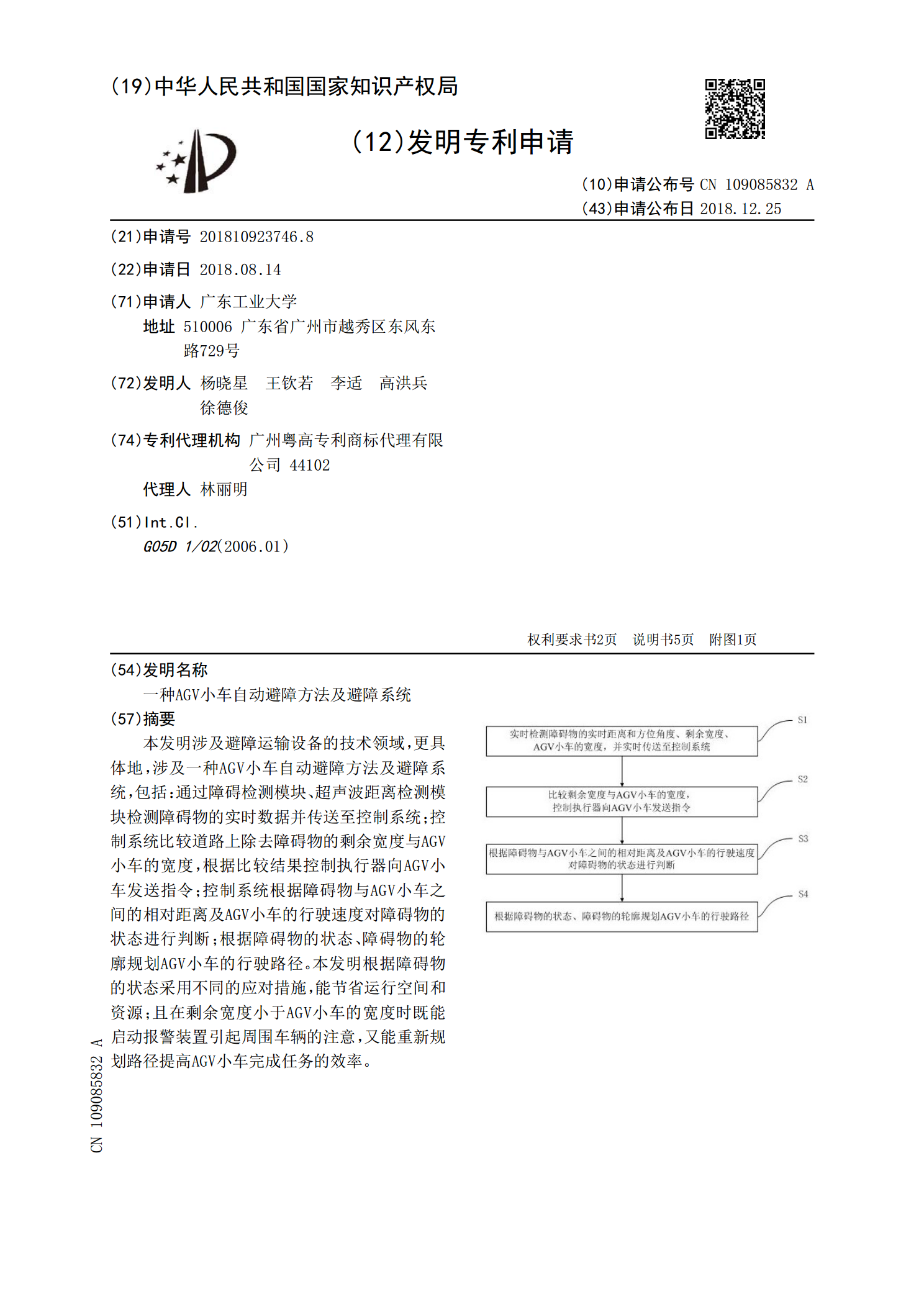
一种AGV小车自动避障方法及避障系统.pdf
本发明涉及避障运输设备的技术领域,更具体地,涉及一种AGV小车自动避障方法及避障系统,包括:通过障碍检测模块、超声波距离检测模块检测障碍物的实时数据并传送至控制系统;控制系统比较道路上除去障碍物的剩余宽度与AGV小车的宽度,根据比较结果控制执行器向AGV小车发送指令;控制系统根据障碍物与AGV小车之间的相对距离及AGV小车的行驶速度对障碍物的状态进行判断;根据障碍物的状态、障碍物的轮廓规划AGV小车的行驶路径。本发明根据障碍物的状态采用不同的应对措施,能节省运行空间和资源;且在剩余宽度小于AGV小车的宽度