
机械臂的避障方法及避障系统.pdf

书生****专家

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机械臂的避障方法及避障系统.pdf
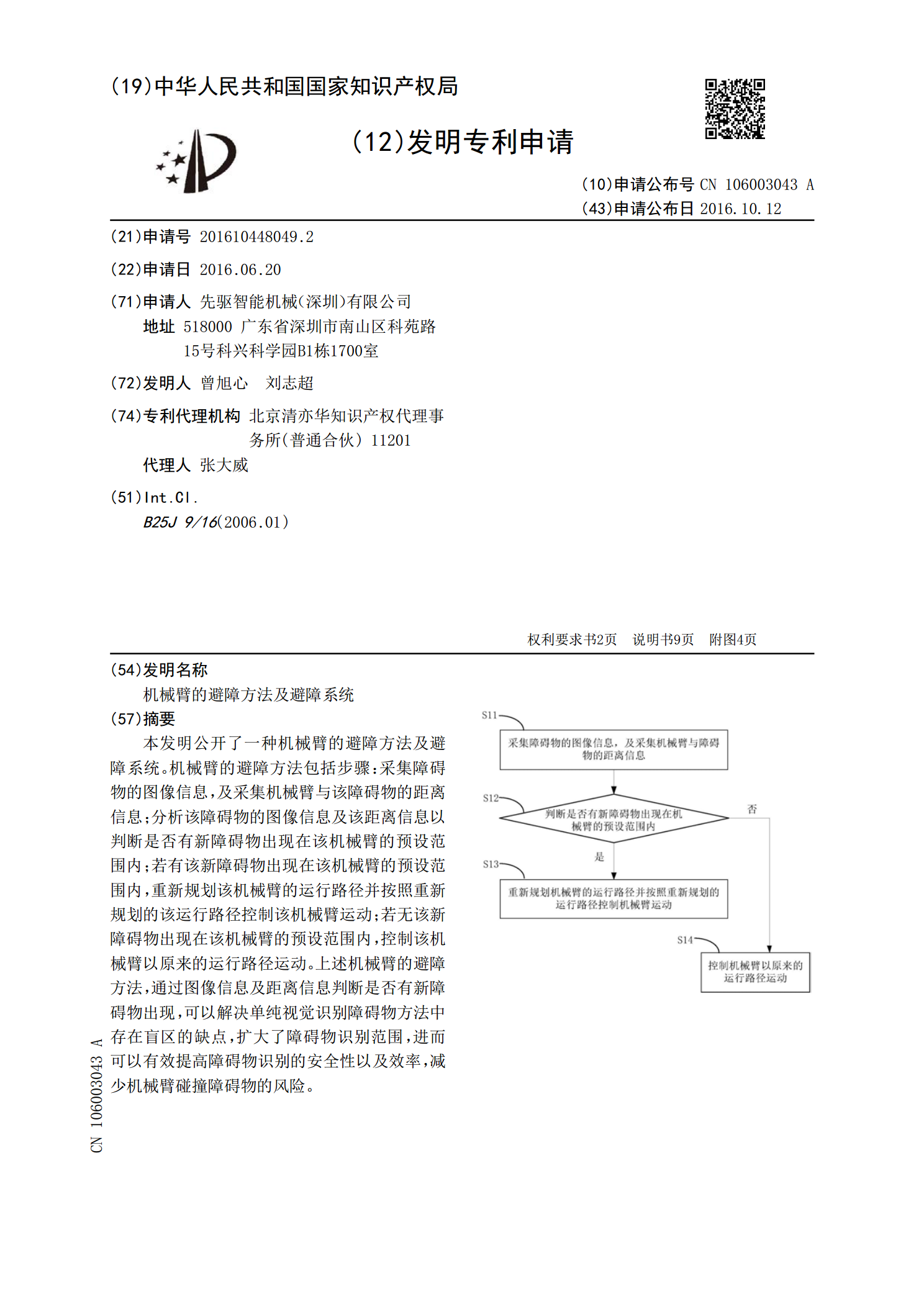
本发明公开了一种机械臂的避障方法及避障系统。机械臂的避障方法包括步骤:采集障碍物的图像信息,及采集机械臂与该障碍物的距离信息;分析该障碍物的图像信息及该距离信息以判断是否有新障碍物出现在该机械臂的预设范围内;若有该新障碍物出现在该机械臂的预设范围内,重新规划该机械臂的运行路径并按照重新规划的该运行路径控制该机械臂运动;若无该新障碍物出现在该机械臂的预设范围内,控制该机械臂以原来的运行路径运动。上述机械臂的避障方法,通过图像信息及距离信息判断是否有新障碍物出现,可以解决单纯视觉识别障碍物方法中存在盲区的缺点
一种避障系统及避障方法.pdf
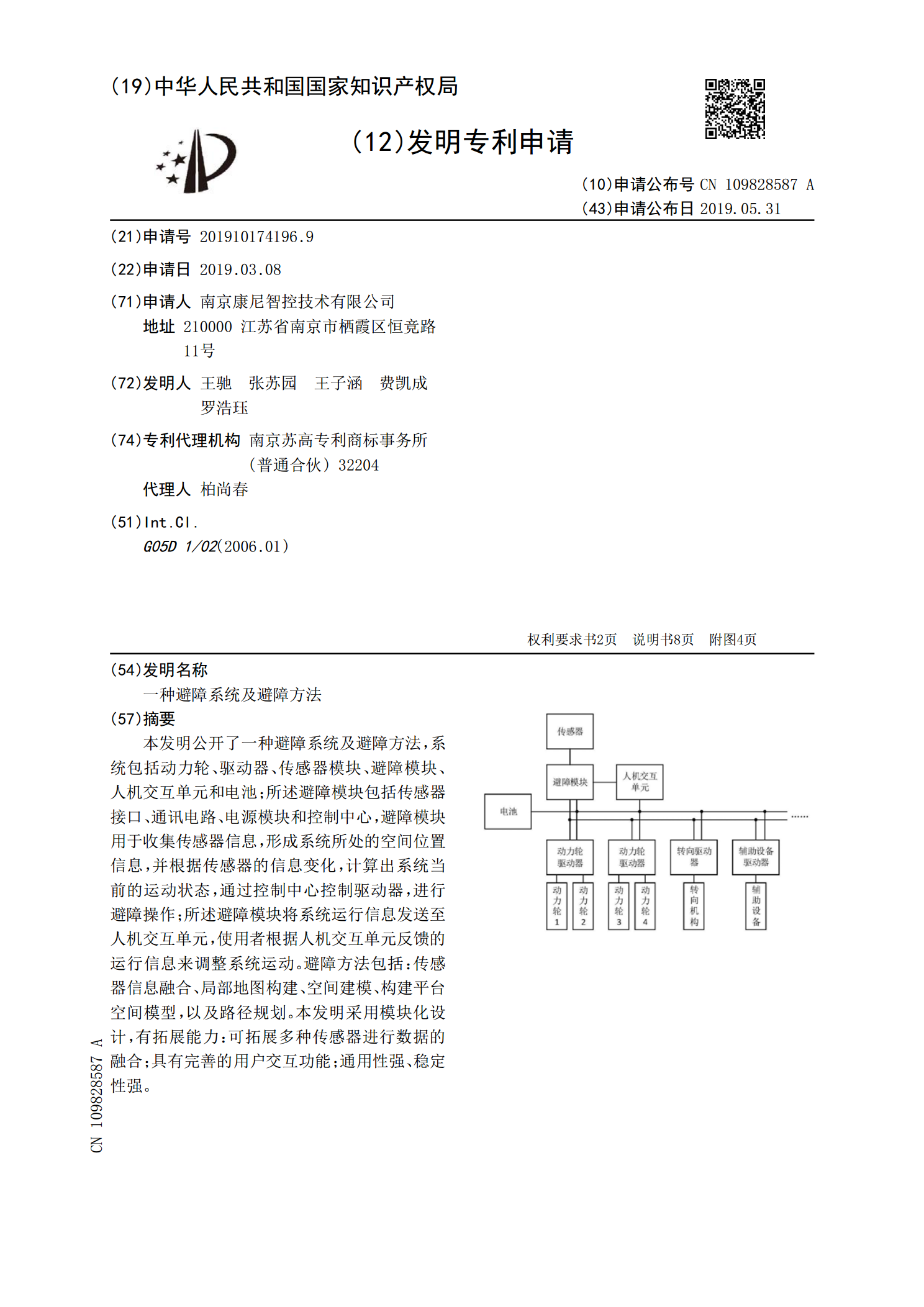
本发明公开了一种避障系统及避障方法,系统包括动力轮、驱动器、传感器模块、避障模块、人机交互单元和电池;所述避障模块包括传感器接口、通讯电路、电源模块和控制中心,避障模块用于收集传感器信息,形成系统所处的空间位置信息,并根据传感器的信息变化,计算出系统当前的运动状态,通过控制中心控制驱动器,进行避障操作;所述避障模块将系统运行信息发送至人机交互单元,使用者根据人机交互单元反馈的运行信息来调整系统运动。避障方法包括:传感器信息融合、局部地图构建、空间建模、构建平台空间模型,以及路径规划。本发明采用模块化设计,
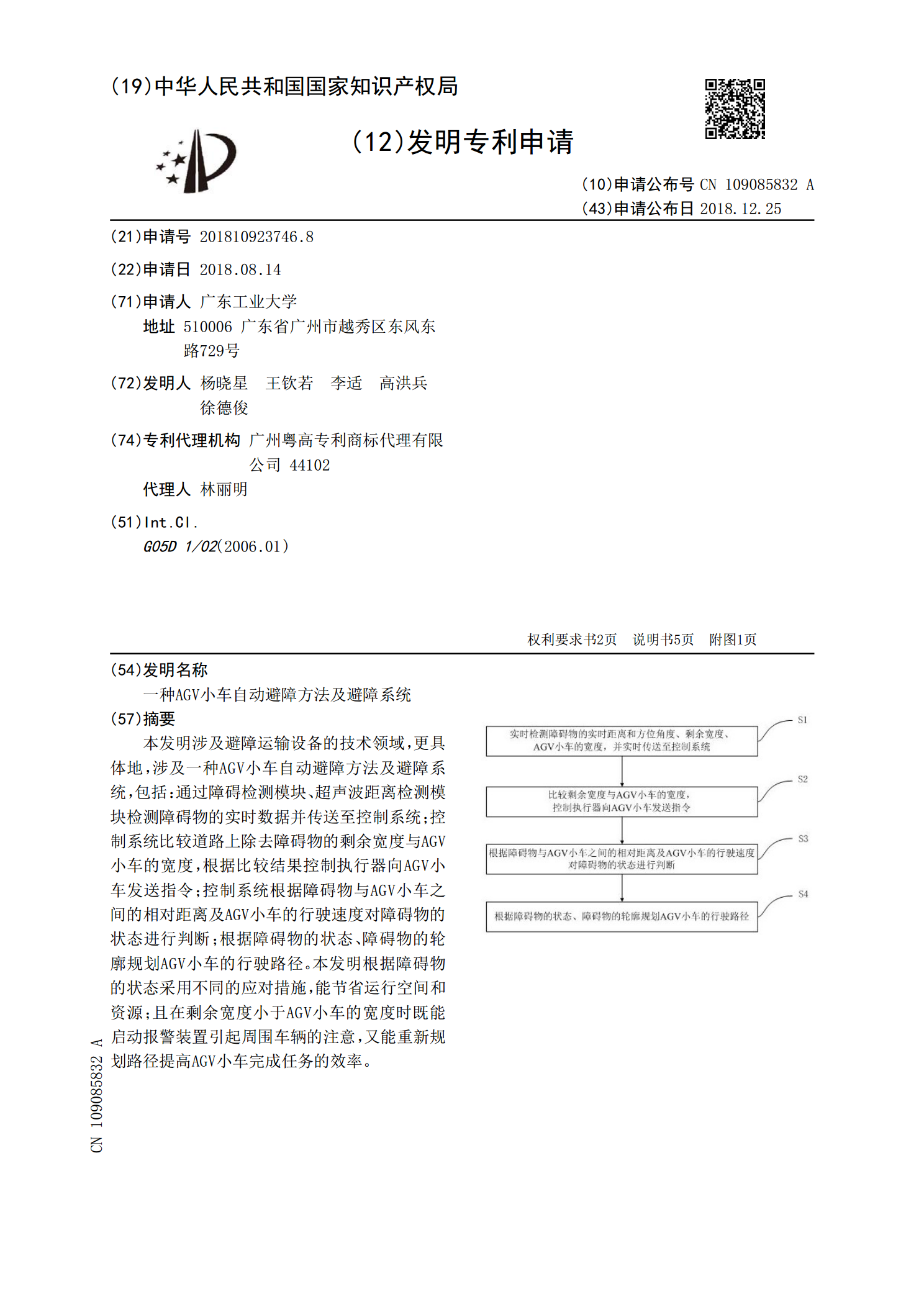
一种AGV小车自动避障方法及避障系统.pdf
本发明涉及避障运输设备的技术领域,更具体地,涉及一种AGV小车自动避障方法及避障系统,包括:通过障碍检测模块、超声波距离检测模块检测障碍物的实时数据并传送至控制系统;控制系统比较道路上除去障碍物的剩余宽度与AGV小车的宽度,根据比较结果控制执行器向AGV小车发送指令;控制系统根据障碍物与AGV小车之间的相对距离及AGV小车的行驶速度对障碍物的状态进行判断;根据障碍物的状态、障碍物的轮廓规划AGV小车的行驶路径。本发明根据障碍物的状态采用不同的应对措施,能节省运行空间和资源;且在剩余宽度小于AGV小车的宽度
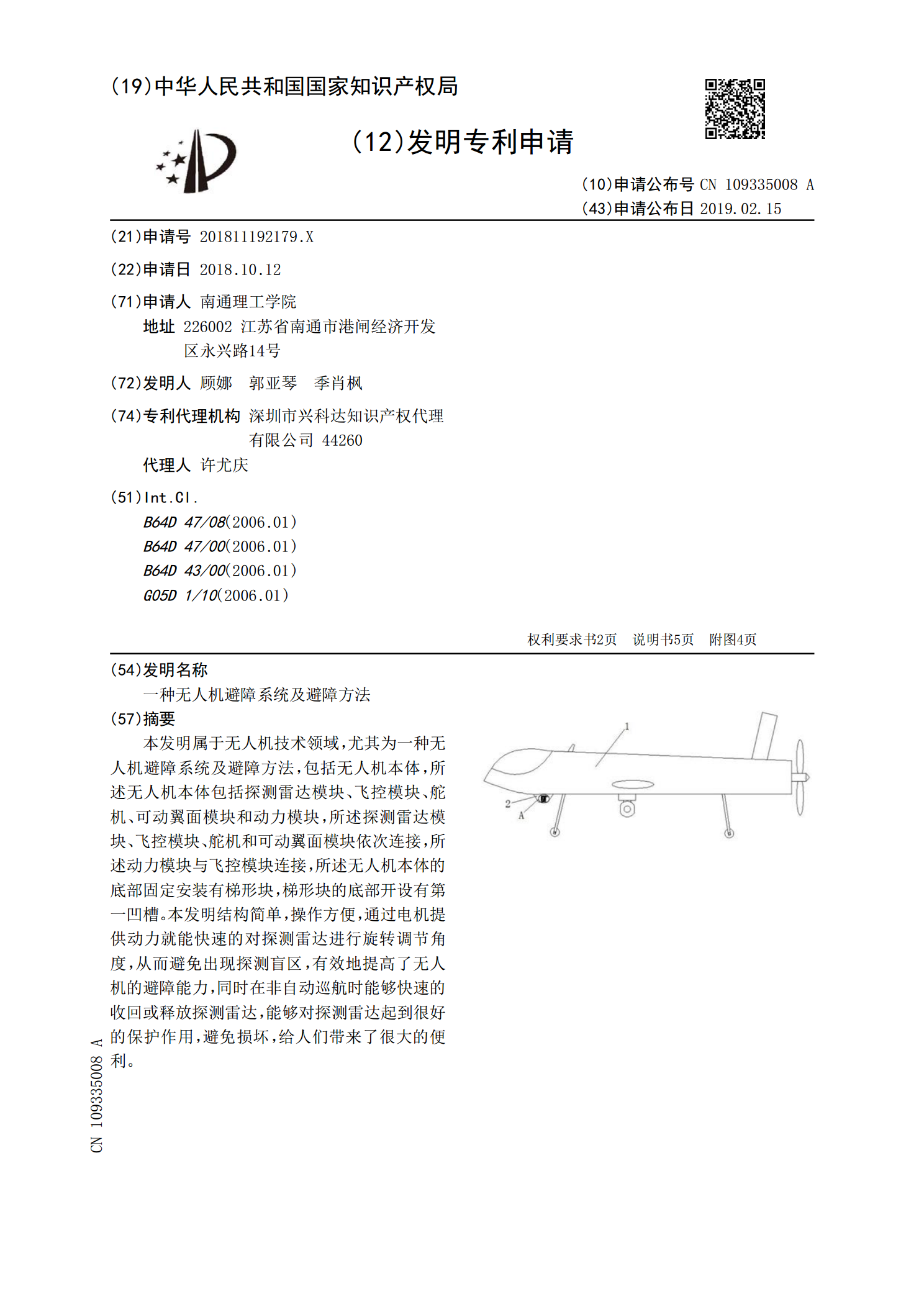
一种无人机避障系统及避障方法.pdf
本发明属于无人机技术领域,尤其为一种无人机避障系统及避障方法,包括无人机本体,所述无人机本体包括探测雷达模块、飞控模块、舵机、可动翼面模块和动力模块,所述探测雷达模块、飞控模块、舵机和可动翼面模块依次连接,所述动力模块与飞控模块连接,所述无人机本体的底部固定安装有梯形块,梯形块的底部开设有第一凹槽。本发明结构简单,操作方便,通过电机提供动力就能快速的对探测雷达进行旋转调节角度,从而避免出现探测盲区,有效地提高了无人机的避障能力,同时在非自动巡航时能够快速的收回或释放探测雷达,能够对探测雷达起到很好的保护作
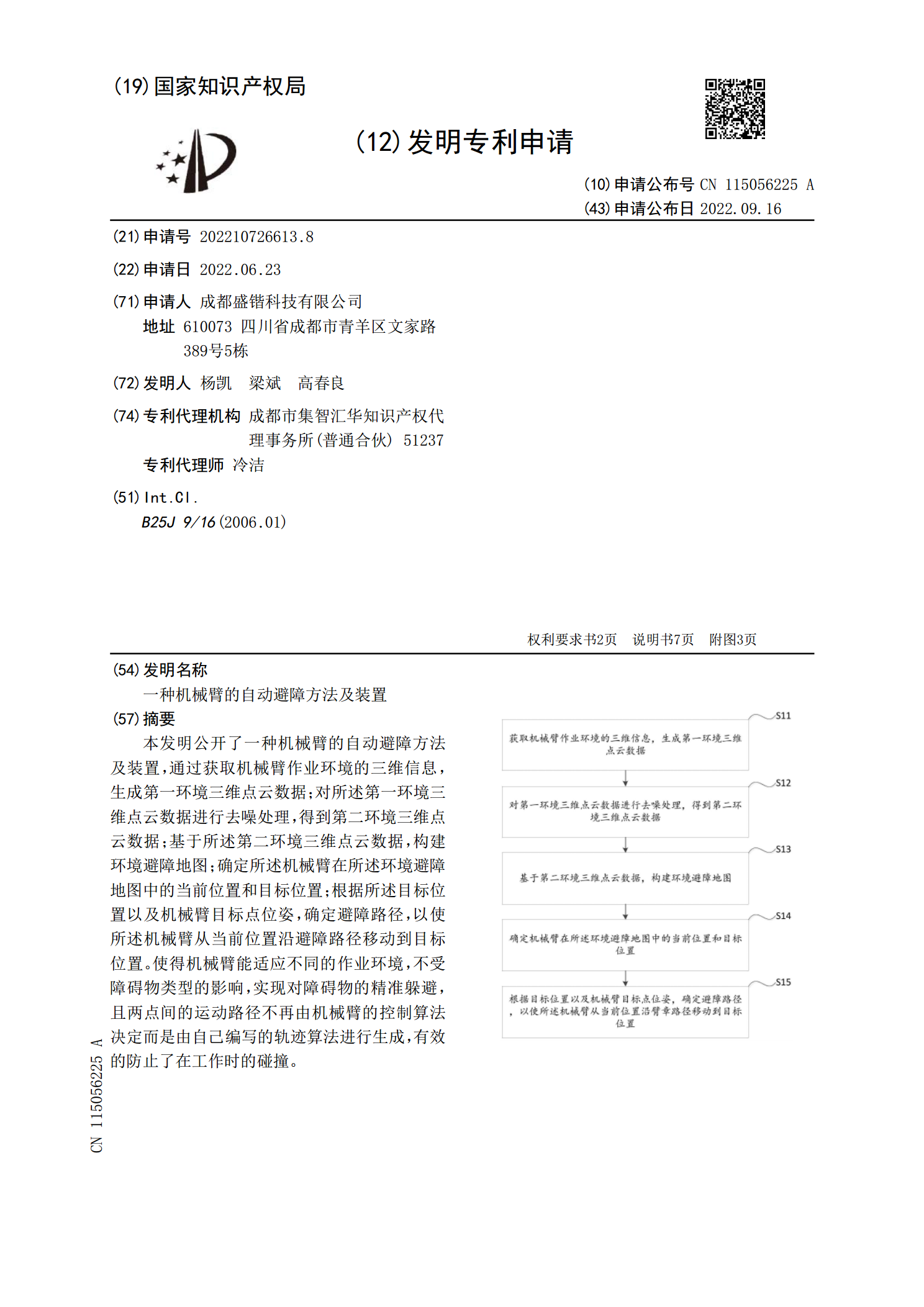
一种机械臂的自动避障方法及装置.pdf
本发明公开了一种机械臂的自动避障方法及装置,通过获取机械臂作业环境的三维信息,生成第一环境三维点云数据;对所述第一环境三维点云数据进行去噪处理,得到第二环境三维点云数据;基于所述第二环境三维点云数据,构建环境避障地图;确定所述机械臂在所述环境避障地图中的当前位置和目标位置;根据所述目标位置以及机械臂目标点位姿,确定避障路径,以使所述机械臂从当前位置沿避障路径移动到目标位置。使得机械臂能适应不同的作业环境,不受障碍物类型的影响,实现对障碍物的精准躲避,且两点间的运动路径不再由机械臂的控制算法决定而是由自己编