
一种AGV小车自动避障方法及避障系统.pdf

戊午****jj

1/9

2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
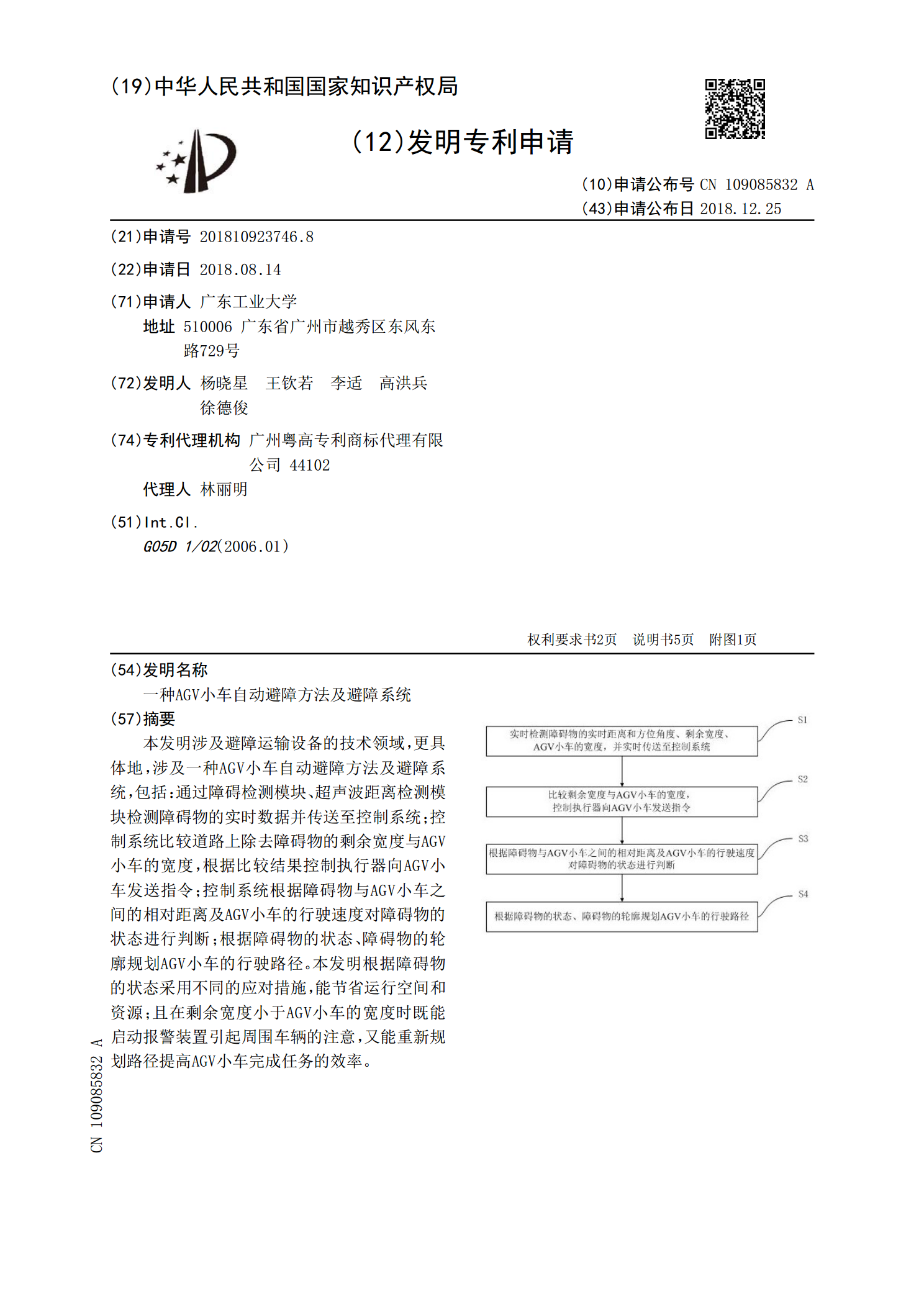
一种AGV小车自动避障方法及避障系统.pdf
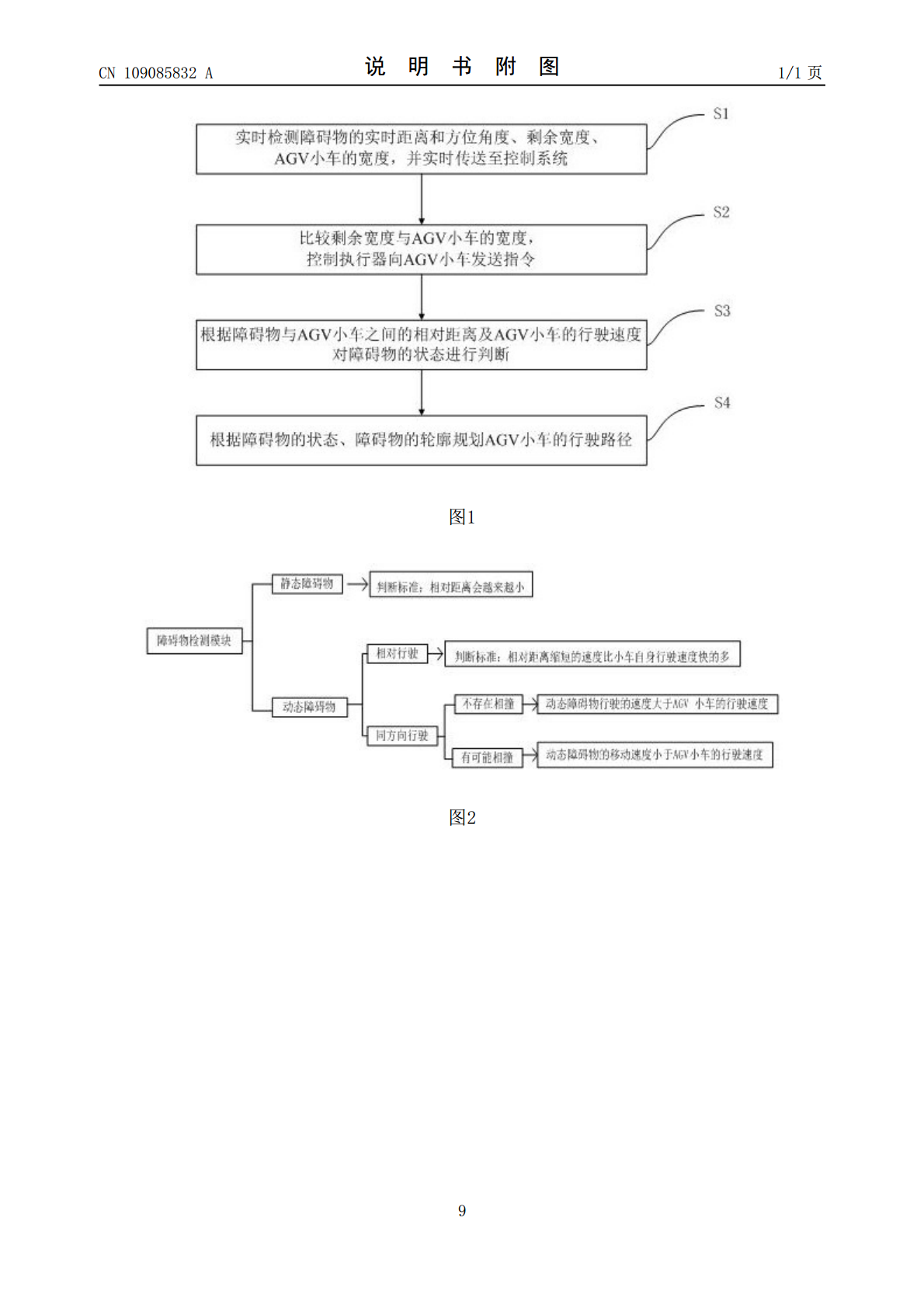
本发明涉及避障运输设备的技术领域,更具体地,涉及一种AGV小车自动避障方法及避障系统,包括:通过障碍检测模块、超声波距离检测模块检测障碍物的实时数据并传送至控制系统;控制系统比较道路上除去障碍物的剩余宽度与AGV小车的宽度,根据比较结果控制执行器向AGV小车发送指令;控制系统根据障碍物与AGV小车之间的相对距离及AGV小车的行驶速度对障碍物的状态进行判断;根据障碍物的状态、障碍物的轮廓规划AGV小车的行驶路径。本发明根据障碍物的状态采用不同的应对措施,能节省运行空间和资源;且在剩余宽度小于AGV小车的宽度
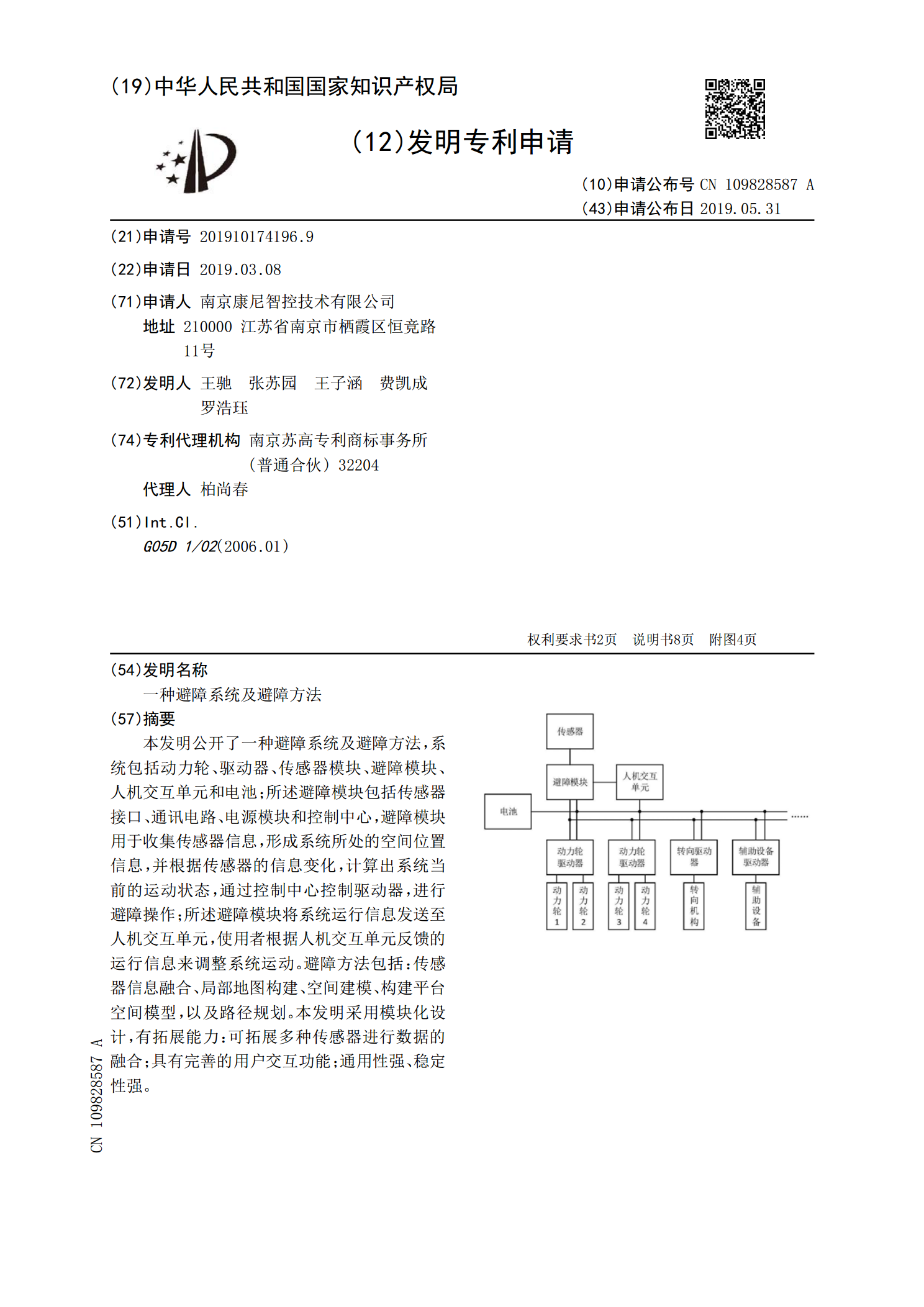
一种避障系统及避障方法.pdf
本发明公开了一种避障系统及避障方法,系统包括动力轮、驱动器、传感器模块、避障模块、人机交互单元和电池;所述避障模块包括传感器接口、通讯电路、电源模块和控制中心,避障模块用于收集传感器信息,形成系统所处的空间位置信息,并根据传感器的信息变化,计算出系统当前的运动状态,通过控制中心控制驱动器,进行避障操作;所述避障模块将系统运行信息发送至人机交互单元,使用者根据人机交互单元反馈的运行信息来调整系统运动。避障方法包括:传感器信息融合、局部地图构建、空间建模、构建平台空间模型,以及路径规划。本发明采用模块化设计,

智能避障小车系统.docx
智能避障小车系统设计学科:新技术专题班级:--------姓名:---学号:17号指导教师:----电气信息工程学院一、系统设计概述通过飞思卡尔智能车竞赛的学习和启发,本设计实现一款具有自动避障运行功能的智能小车,通过光电开关和超声波测距模块配合识别前方是否有障碍物,如果遇到障碍物则通过舵机改变行驶方向。直流电机驱动模块采用PID闭环控制,可以达到速度稳定、快速、准确的控制,使智能小车能够及时制动和恒速运行。本设计报告针对传感器信号处理设计、电路设计、控制算法等方面进行重点阐述。二、总体系统构想框图MC9

一种自动导航避障小车.pdf
本发明涉及一种自动导航避障小车,它包括:车身主体,车身主体包括底板和外壳,外壳具有内腔;激光导航组件;激光扫描组件;超声波测距组件,包括超声波探头和超声波测距电气元件,超声波探头设置在外壳前侧;障碍物检测组件,设置在底板上且障碍物检测组件中的避障传感探头通过外壳上的开口向前方外露;控制组件,包括PLC模块;驱动组件,包括电池和由控制组件控制的伺服电机;激光导航组件、激光扫描组件、超声波测距组件以及障碍物检测组件连接在PLC模块的输入端,驱动组件连接在PLC模块的控制端;车轮组件,车轮组件设置在底板下方且由
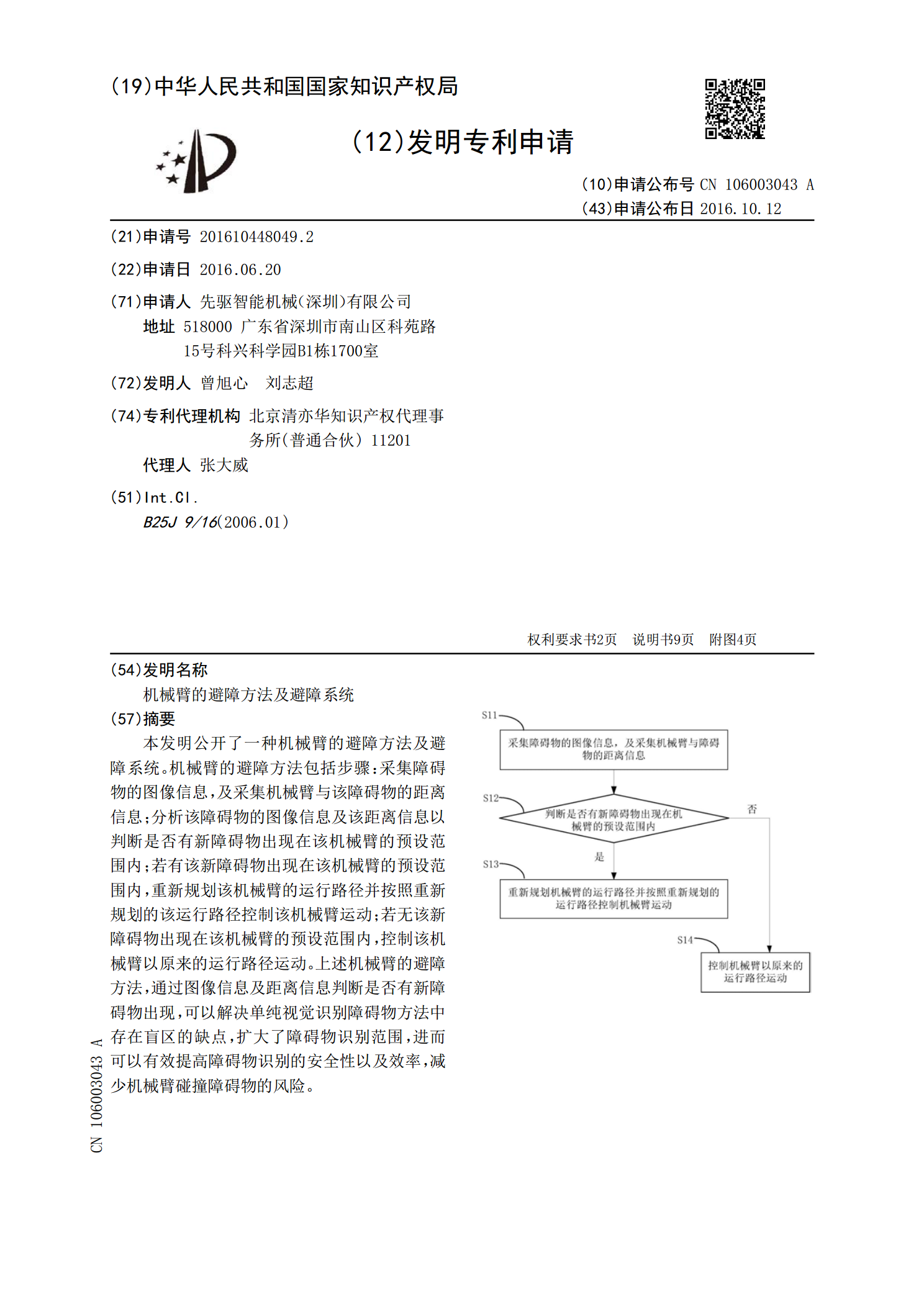
机械臂的避障方法及避障系统.pdf
本发明公开了一种机械臂的避障方法及避障系统。机械臂的避障方法包括步骤:采集障碍物的图像信息,及采集机械臂与该障碍物的距离信息;分析该障碍物的图像信息及该距离信息以判断是否有新障碍物出现在该机械臂的预设范围内;若有该新障碍物出现在该机械臂的预设范围内,重新规划该机械臂的运行路径并按照重新规划的该运行路径控制该机械臂运动;若无该新障碍物出现在该机械臂的预设范围内,控制该机械臂以原来的运行路径运动。上述机械臂的避障方法,通过图像信息及距离信息判断是否有新障碍物出现,可以解决单纯视觉识别障碍物方法中存在盲区的缺点