
避障方法及装置、自动导航装置.pdf

山梅****ai


1/10

2/10
3/10

4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
避障方法及装置、自动导航装置.pdf
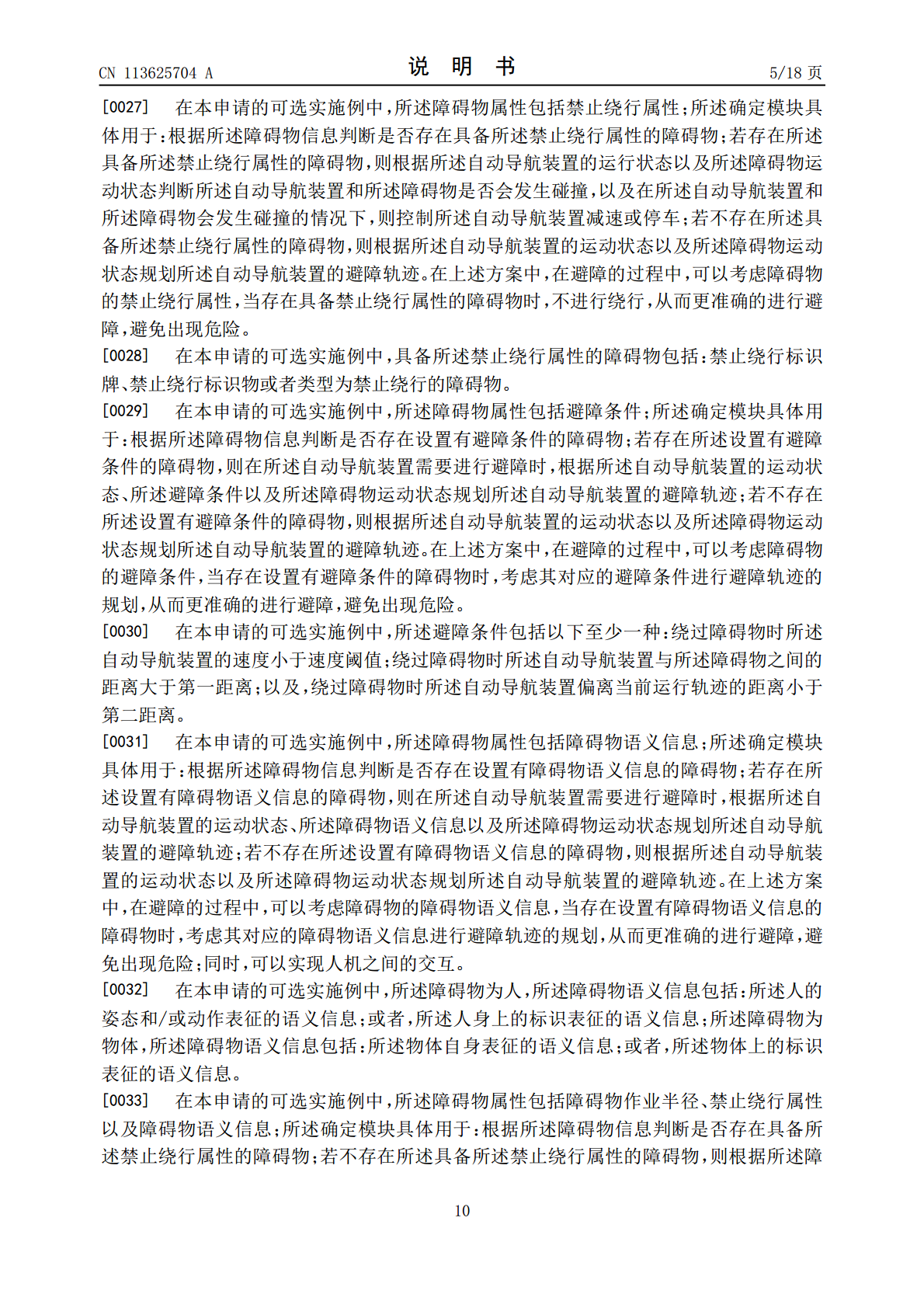
本申请提供一种避障方法及装置、自动导航装置,应用于机器人领域,其中,避障方法包括:获取自动导航装置的运动状态以及自动导航装置行驶路线上的障碍物信息;其中,障碍物信息包括障碍物运动状态以及障碍物属性;根据自动导航装置的运动状态以及障碍物信息确定自动导航装置对应的避障策略。在上述方案中,自动导航装置在避障的过程中,会综合考虑自身的运动状态以及障碍物的障碍物运动状态和障碍物属性,从而更准确的进行避障,避免出现危险。
智能车自动避障装置及控制方法.pdf
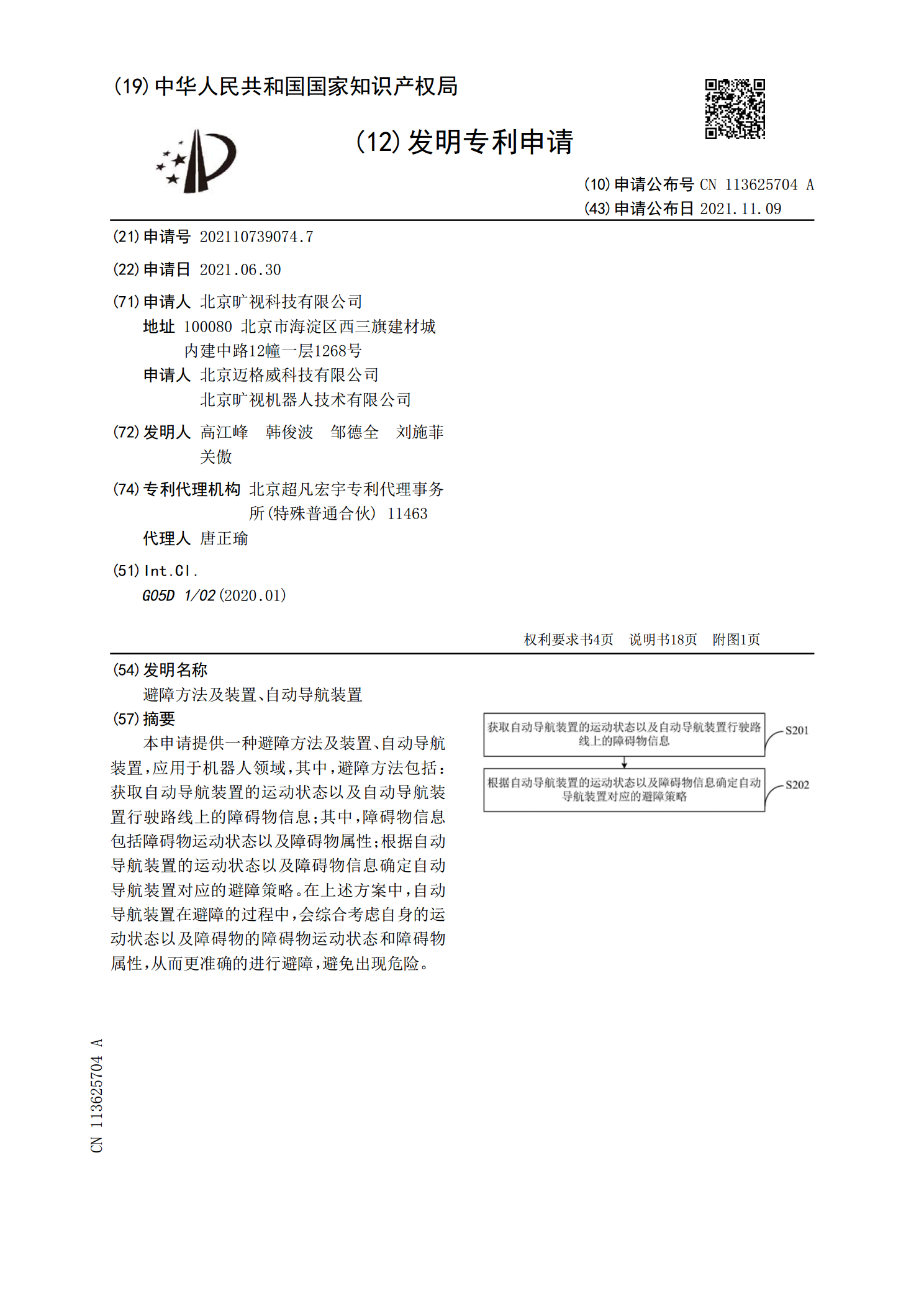
本发明公开了智能车自动避障装置及控制方法,所述避障装置包括控制器,以及分别连接到控制器的测距传感器A、测距传感器B、测距传感器C、测距传感器D、测距传感器E和测量车轮角位移的编码器,其中,测距传感器A位于车头的中间位置且朝向正前方,测距传感器B位于车头偏右侧位置且朝向右前方,测距传感器C位于车头偏左侧位置且朝向左前方,测距传感器D和测距传感器E设置在车身左右两侧且朝向道路的两侧。控制器获取车身上的传感器信号,综合分析测距传感器状态信息和编码器数据,从而判断障碍物所处位置及智能车的运行状态,控制智能车转向角

一种智能移动设备的导航避障方法及装置.pdf
本发明公开了一种智能移动设备的导航避障方法及装置,该方法包括:利用二维测距传感器对智能移动设备所处环境进行遍历扫描,得到二维环境地图;获取三维深度摄像头在智能移动设备所处环境的不同位置采集到的三维环境数据,并将三维环境数据与二维环境地图融合,得到综合环境地图;接收外界输入的目标位置指令,基于智能移动设备的当前位置及综合环境地图规划出避障路线,并控制智能移动设备按照避障路线到达与目标位置指令对应的目标位置。该技术方案避免了现有技术提供的技术方案中存在的由于二维测距传感器只能检测到特定高度平面的物体存在情况,

激光避障方法及装置.pdf
本申请公开了一种激光避障方法及装置,其中方法包括:确定最近的障碍物的障碍物信息;根据所述障碍物信息确定所述最近的障碍物的保留时间;根据所述最近的障碍物的障碍物信息以及保留时间进行路径规划。达到了通过动态设置障碍物保留时间能够减少机器人行走中的震荡的目的,从而实现了能够使机器人在障碍物环境中能够保证运动平滑,有效避免会来回规划路径,降低行走震荡率的技术效果。
一种机械臂的自动避障方法及装置.pdf
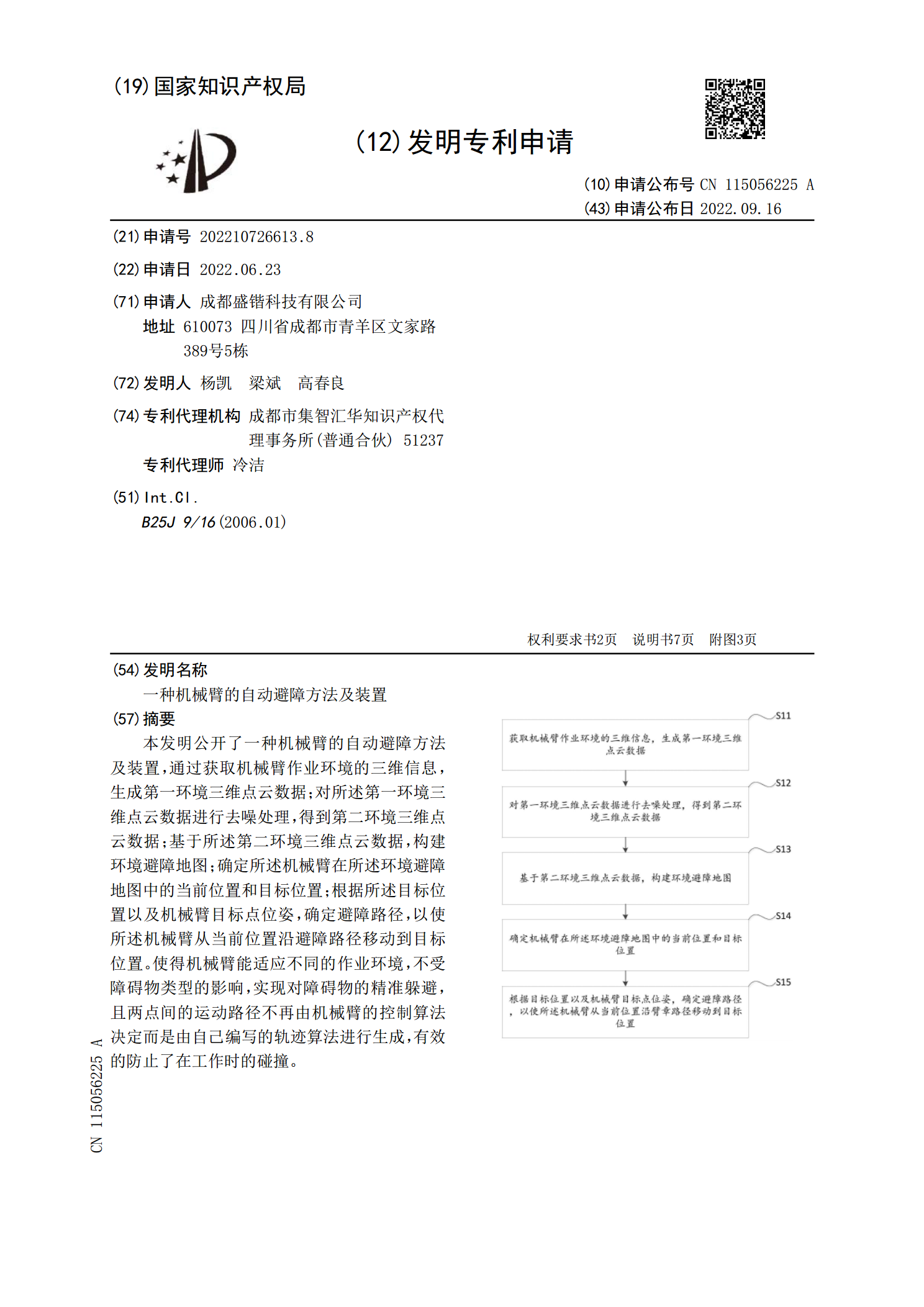
本发明公开了一种机械臂的自动避障方法及装置,通过获取机械臂作业环境的三维信息,生成第一环境三维点云数据;对所述第一环境三维点云数据进行去噪处理,得到第二环境三维点云数据;基于所述第二环境三维点云数据,构建环境避障地图;确定所述机械臂在所述环境避障地图中的当前位置和目标位置;根据所述目标位置以及机械臂目标点位姿,确定避障路径,以使所述机械臂从当前位置沿避障路径移动到目标位置。使得机械臂能适应不同的作业环境,不受障碍物类型的影响,实现对障碍物的精准躲避,且两点间的运动路径不再由机械臂的控制算法决定而是由自己编