
割草方法、装置、割草机器人以及存储介质.pdf

子安****吖吖

1/10

2/10
3/10

4/10

5/10
6/10

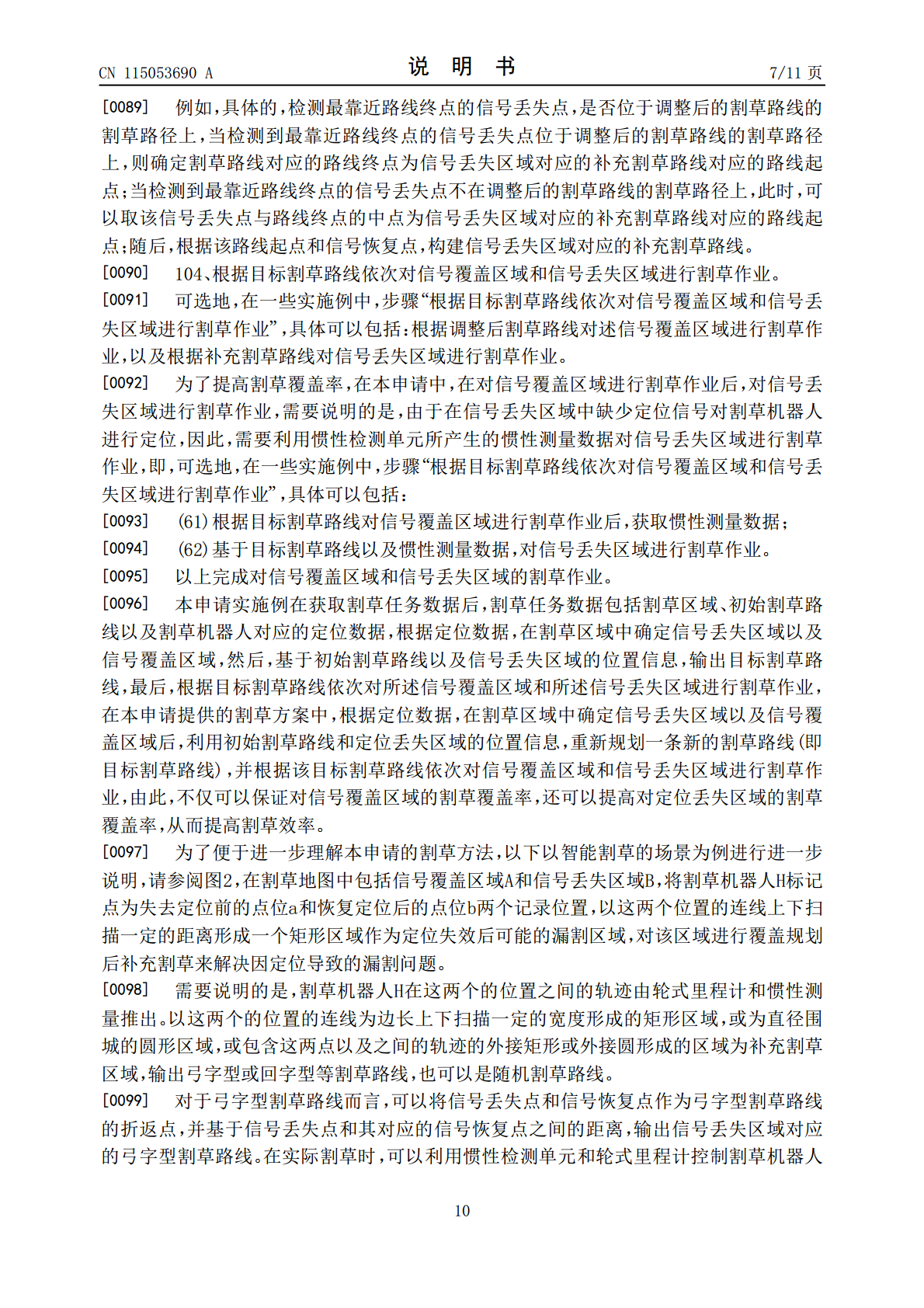
7/10
8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
割草方法、装置、割草机器人以及存储介质.pdf
本申请实施例公开了一种割草方法、装置、割草机器人以及存储介质,包括:获取割草任务数据,所述割草任务数据包括割草区域、初始割草路线以及割草机器人对应的定位数据;根据所述定位数据,在所述割草区域中确定信号丢失区域以及信号覆盖区域;基于所述初始割草路线以及所述信号丢失区域的位置信息,输出目标割草路线;根据所述目标割草路线依次对所述信号覆盖区域和所述信号丢失区域进行割草作业,该方案可以提高对定位丢失区域的割草覆盖率,从而提高割草效率。
割草机的建图方法、装置、存储介质及割草机.pdf
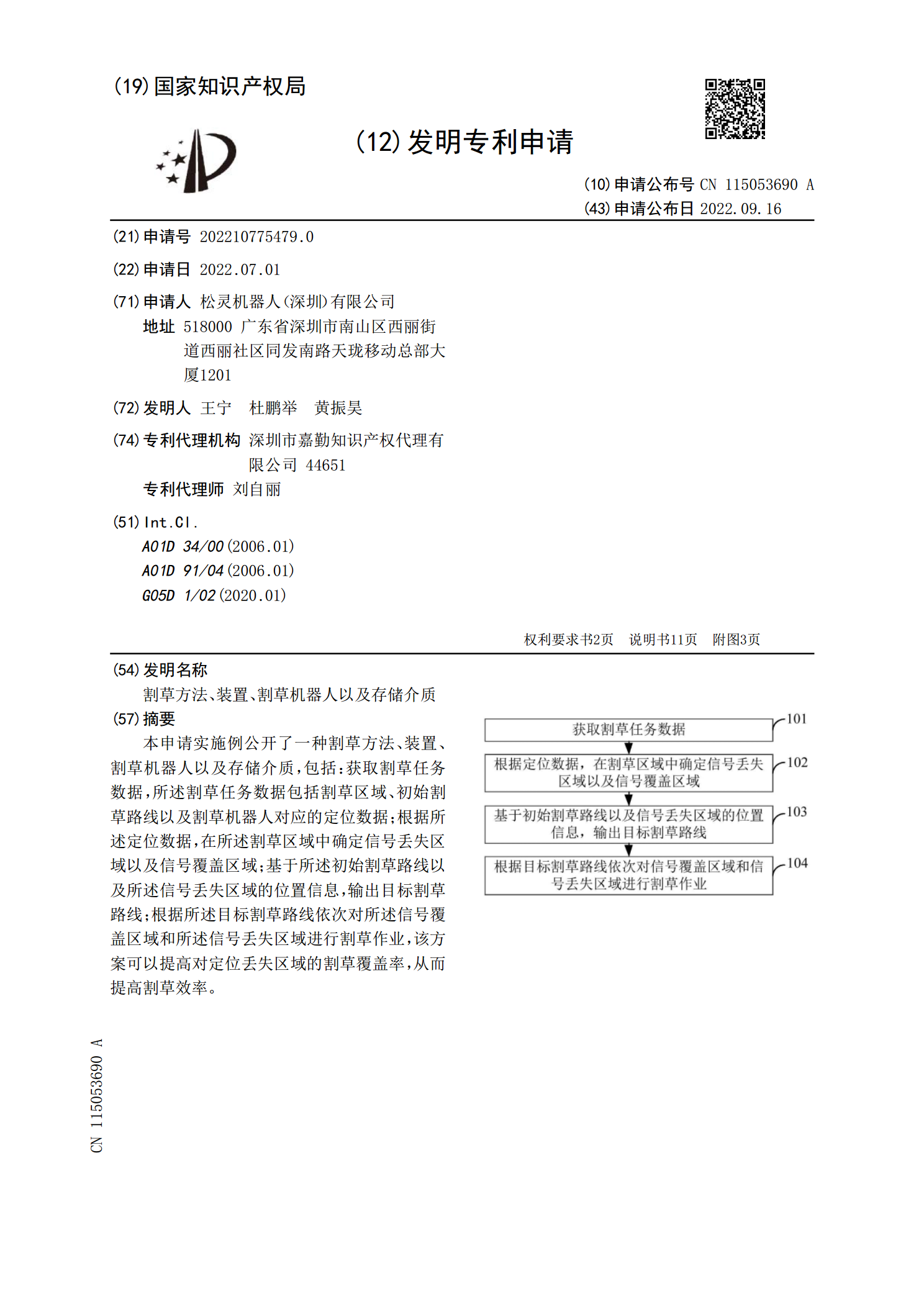
本申请提供割草机的建图方法,获取工作区域的初步地图,其中两个相邻目标点为第一目标点连接形成初始连线,选择距离初始连线最远的目标点为第二目标点,第二目标点与第一目标点的连线为待处理连线;选择待处理连线两端之间,且距离待处理连线最远的目标点为第三目标点,若第三目标点到待处理连线的距离大于第一预设阈值,则第三目标点与待处理连线两端目标点的连线为新的待处理连线,直至选择的第三目标点到待处理连线的距离小于等于第一预设阈值,保留到任一个待处理连线的距离大于第一预设阈值的第三目标点为建图目标点;根据建图目标点、第一目标
割草机控制方法、装置、电子设备及存储介质.pdf
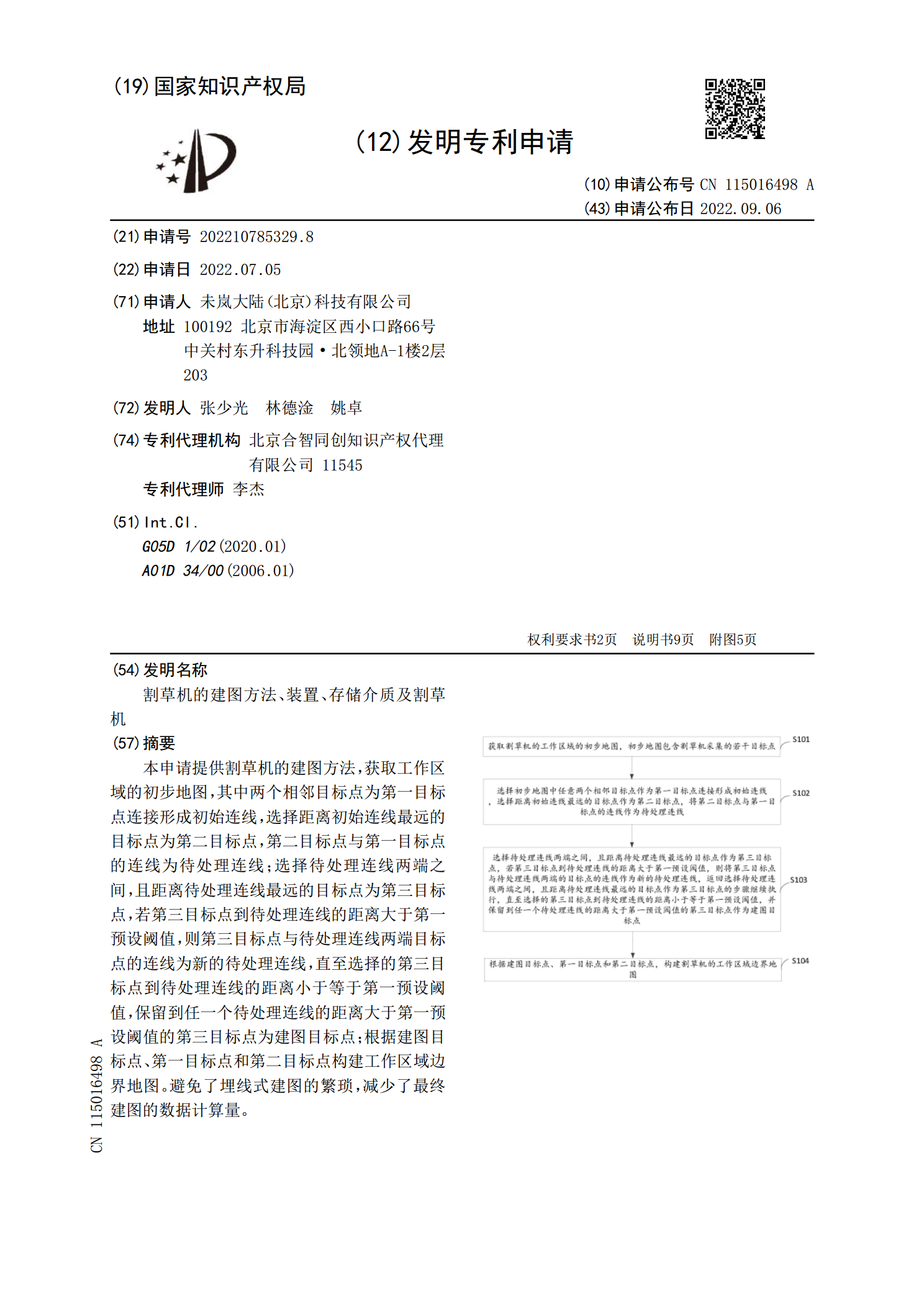
本发明提供一种割草机控制方法、装置、电子设备及存储介质,所述割草机控制方法包括:当所述割草机以预设的第一规划路线在目标区域内行进时,通过预设的定位方法,对所述割草机在行进过程中进行实时定位,得到所述割草机的实时行进坐标;通过所述实时行进坐标对所述第一规划路线进行动态调整,得到第二规划路线;控制所述割草机以所述第二规划路线在所述目标区域内行进。本发明可以在根据实时行进坐标对第一规划路线进行动态调整后,得到第二规划路线来控制割草机的行进,不需要人工对割草机进行控制,降低人力成本,及时调整割草机的行进路线,提高

基站安装位置的推荐方法、装置、存储介质及割草机.pdf
本申请所提供的一种基站安装位置的推荐方法、装置、存储介质及割草机,通过获取目标地图边界中多个采样点处的卫星观测数据;根据各采样点的卫星观测数据,确定符合预设条件的目标采样点;根据目标采样点的卫星观测数据,确定公共卫星观测频段;根据公共卫星观测频段和各采样点的卫星观测数据,确定各采样点的公共卫星观测频段的数量;根据各采样点的公共卫星观测频段的数量,以确定基站安装位置推荐信息,以实现通过移动割草机进行基站安装位置的推荐,避免多次移动基站的位置,方便用户操作;且能够将基站安装在公共卫星观测频段的数量较多的区域,
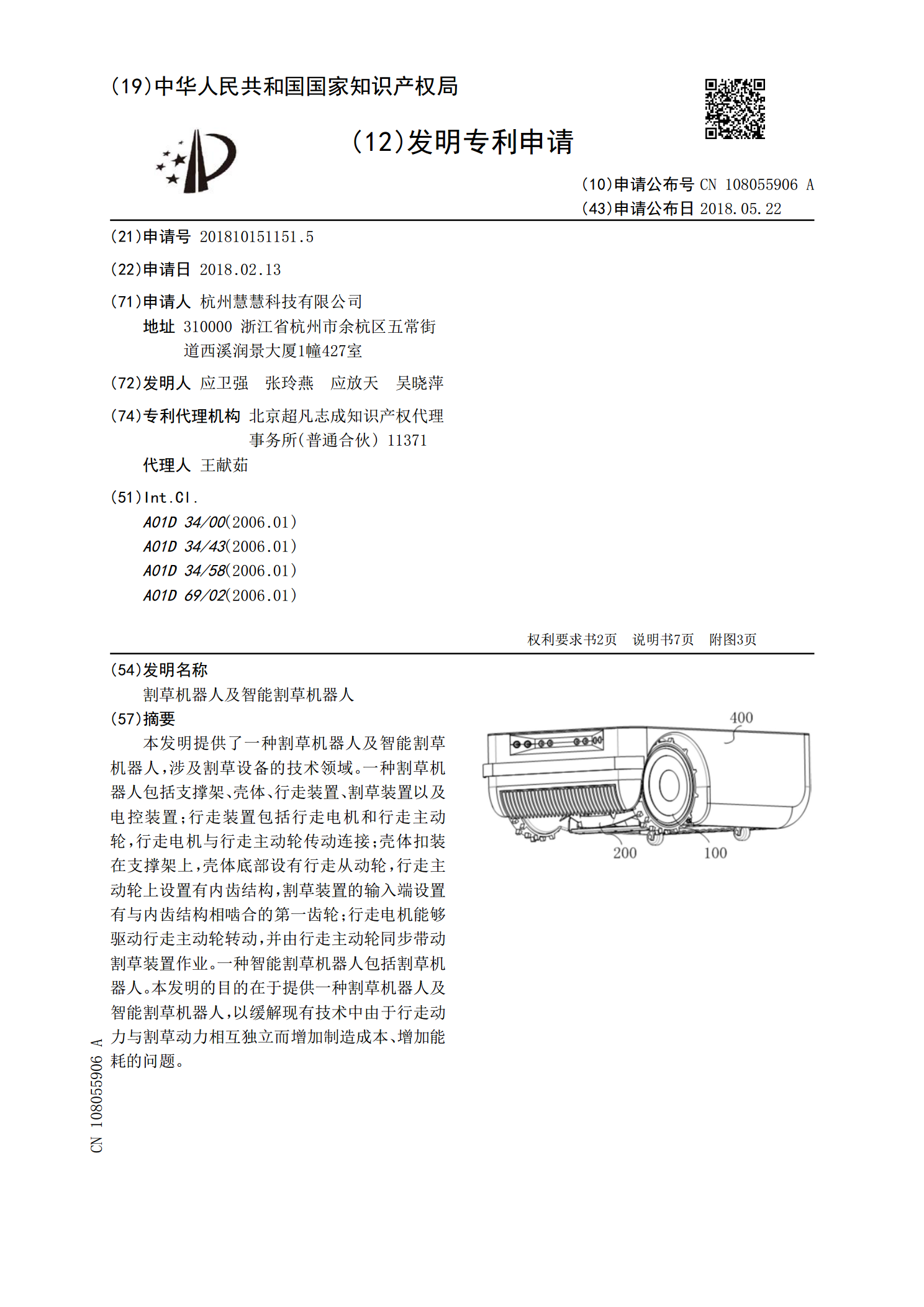
割草机器人及智能割草机器人.pdf
本发明提供了一种割草机器人及智能割草机器人,涉及割草设备的技术领域。一种割草机器人包括支撑架、壳体、行走装置、割草装置以及电控装置;行走装置包括行走电机和行走主动轮,行走电机与行走主动轮传动连接;壳体扣装在支撑架上,壳体底部设有行走从动轮,行走主动轮上设置有内齿结构,割草装置的输入端设置有与内齿结构相啮合的第一齿轮;行走电机能够驱动行走主动轮转动,并由行走主动轮同步带动割草装置作业。一种智能割草机器人包括割草机器人。本发明的目的在于提供一种割草机器人及智能割草机器人,以缓解现有技术中由于行走动力与割草动力