
割草机控制方法、装置、电子设备及存储介质.pdf

书生****12

1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
割草机控制方法、装置、电子设备及存储介质.pdf
本发明提供一种割草机控制方法、装置、电子设备及存储介质,所述割草机控制方法包括:当所述割草机以预设的第一规划路线在目标区域内行进时,通过预设的定位方法,对所述割草机在行进过程中进行实时定位,得到所述割草机的实时行进坐标;通过所述实时行进坐标对所述第一规划路线进行动态调整,得到第二规划路线;控制所述割草机以所述第二规划路线在所述目标区域内行进。本发明可以在根据实时行进坐标对第一规划路线进行动态调整后,得到第二规划路线来控制割草机的行进,不需要人工对割草机进行控制,降低人力成本,及时调整割草机的行进路线,提高

控制方法、装置、电子设备及存储介质.pdf
本公开提出一种控制方法、装置、电子设备及存储介质。其中方法包括:步骤101:处理器控制主摄像头实时进行图像采集;步骤102:处理器基于实时采集的当前图像判断主摄像头是否处于遮挡状态,若处于遮挡状态,则执行步骤103,若不处于遮挡状态,则执行步骤105;步骤103:处理器生成语音警示信息,通过音频部件发出所述语音警示信息;步骤104:处理器获取辅助摄像头实时拍摄得到包含目标人体的图像,返回执行步骤102;步骤105:处理器基于目标人体的脸部的位置,确定白光灯的发光方向以及确定主摄像头的目标拍摄方向和目标焦距
控制方法、装置、电子设备及存储介质.pdf
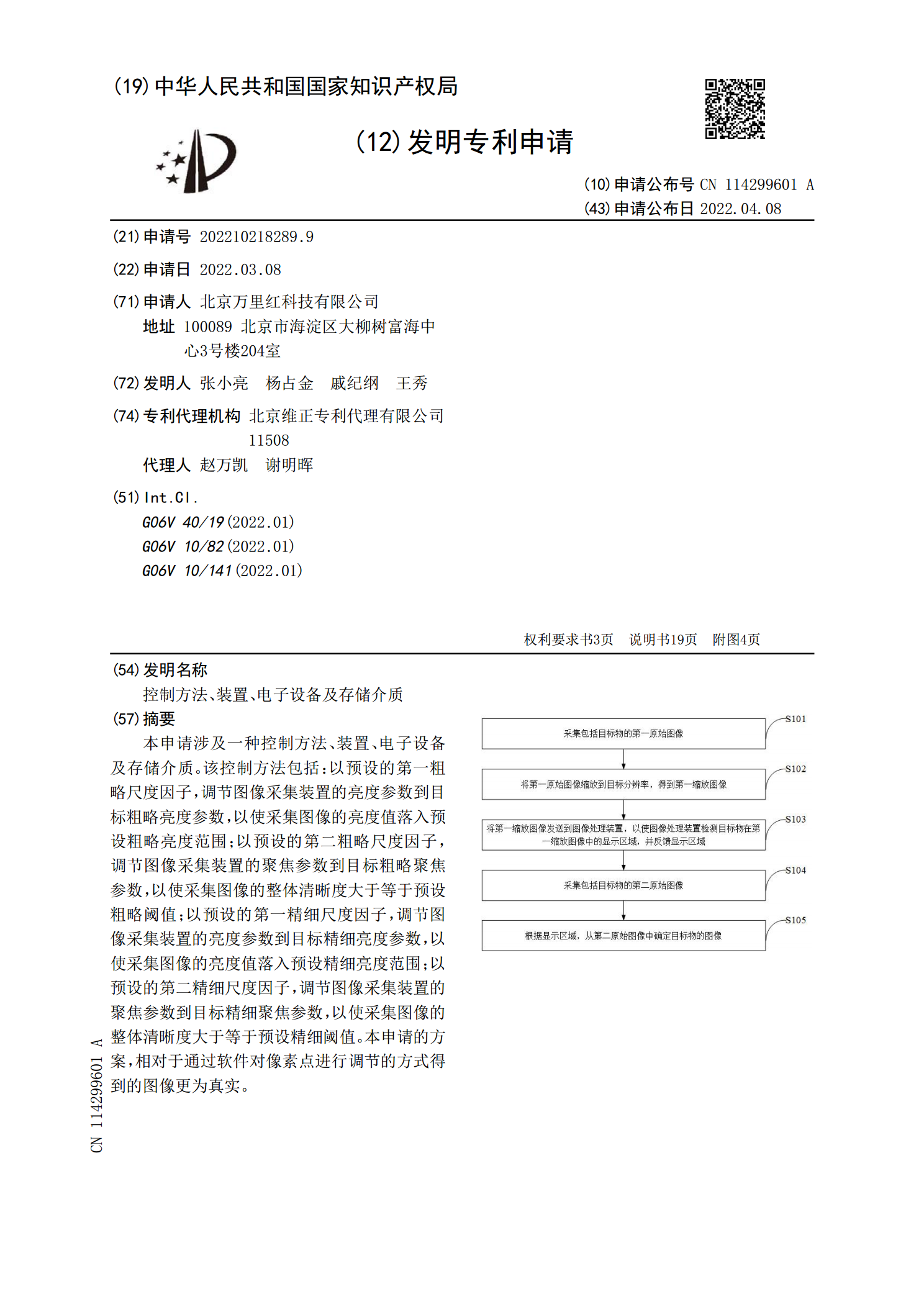
本申请涉及一种控制方法、装置、电子设备及存储介质。该控制方法包括:以预设的第一粗略尺度因子,调节图像采集装置的亮度参数到目标粗略亮度参数,以使采集图像的亮度值落入预设粗略亮度范围;以预设的第二粗略尺度因子,调节图像采集装置的聚焦参数到目标粗略聚焦参数,以使采集图像的整体清晰度大于等于预设粗略阈值;以预设的第一精细尺度因子,调节图像采集装置的亮度参数到目标精细亮度参数,以使采集图像的亮度值落入预设精细亮度范围;以预设的第二精细尺度因子,调节图像采集装置的聚焦参数到目标精细聚焦参数,以使采集图像的整体清晰度大
控制方法、装置、电子设备及存储介质.pdf
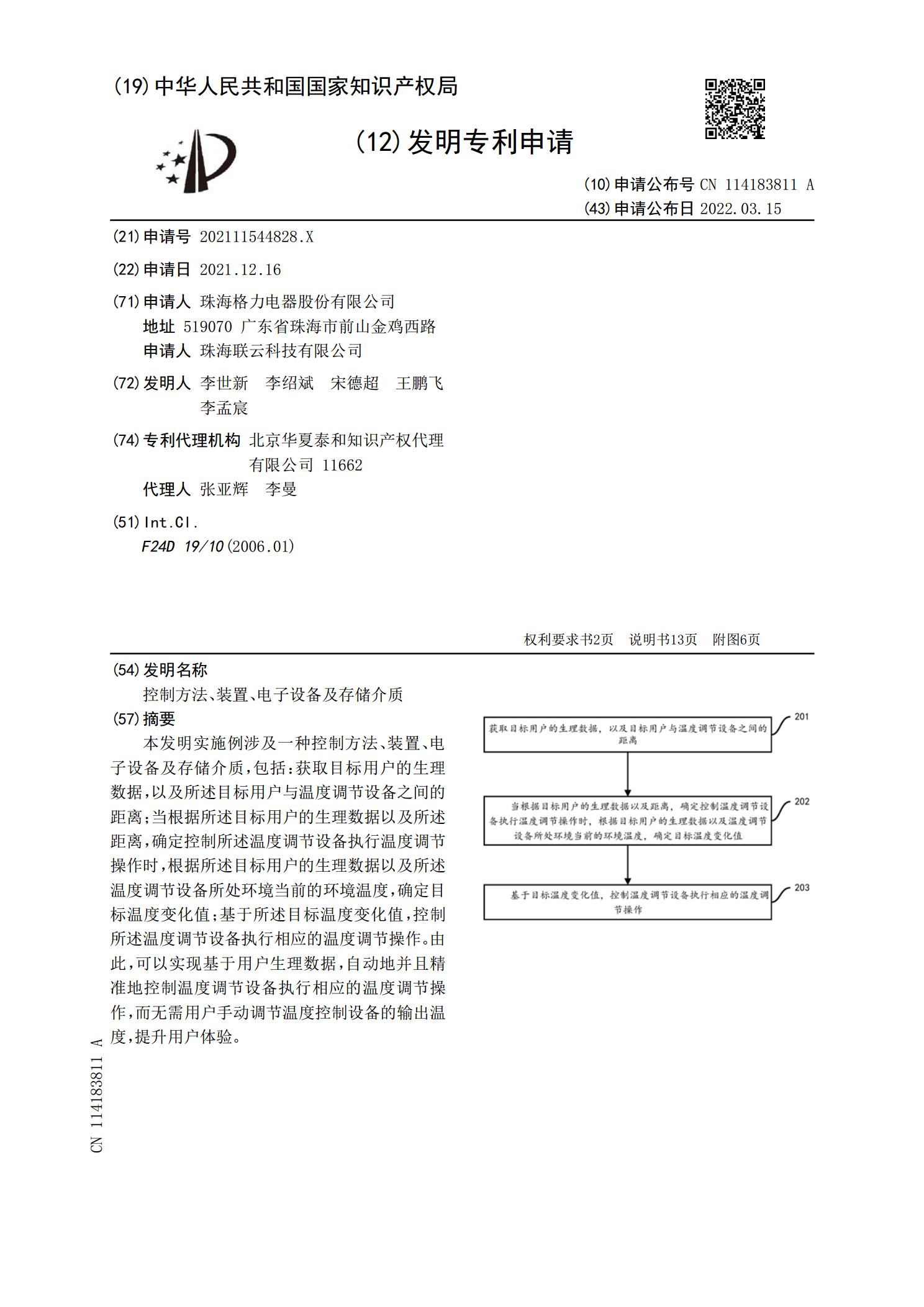
本发明实施例涉及一种控制方法、装置、电子设备及存储介质,包括:获取目标用户的生理数据,以及所述目标用户与温度调节设备之间的距离;当根据所述目标用户的生理数据以及所述距离,确定控制所述温度调节设备执行温度调节操作时,根据所述目标用户的生理数据以及所述温度调节设备所处环境当前的环境温度,确定目标温度变化值;基于所述目标温度变化值,控制所述温度调节设备执行相应的温度调节操作。由此,可以实现基于用户生理数据,自动地并且精准地控制温度调节设备执行相应的温度调节操作,而无需用户手动调节温度控制设备的输出温度,提升用户
控制方法、装置、电子设备及存储介质.pdf
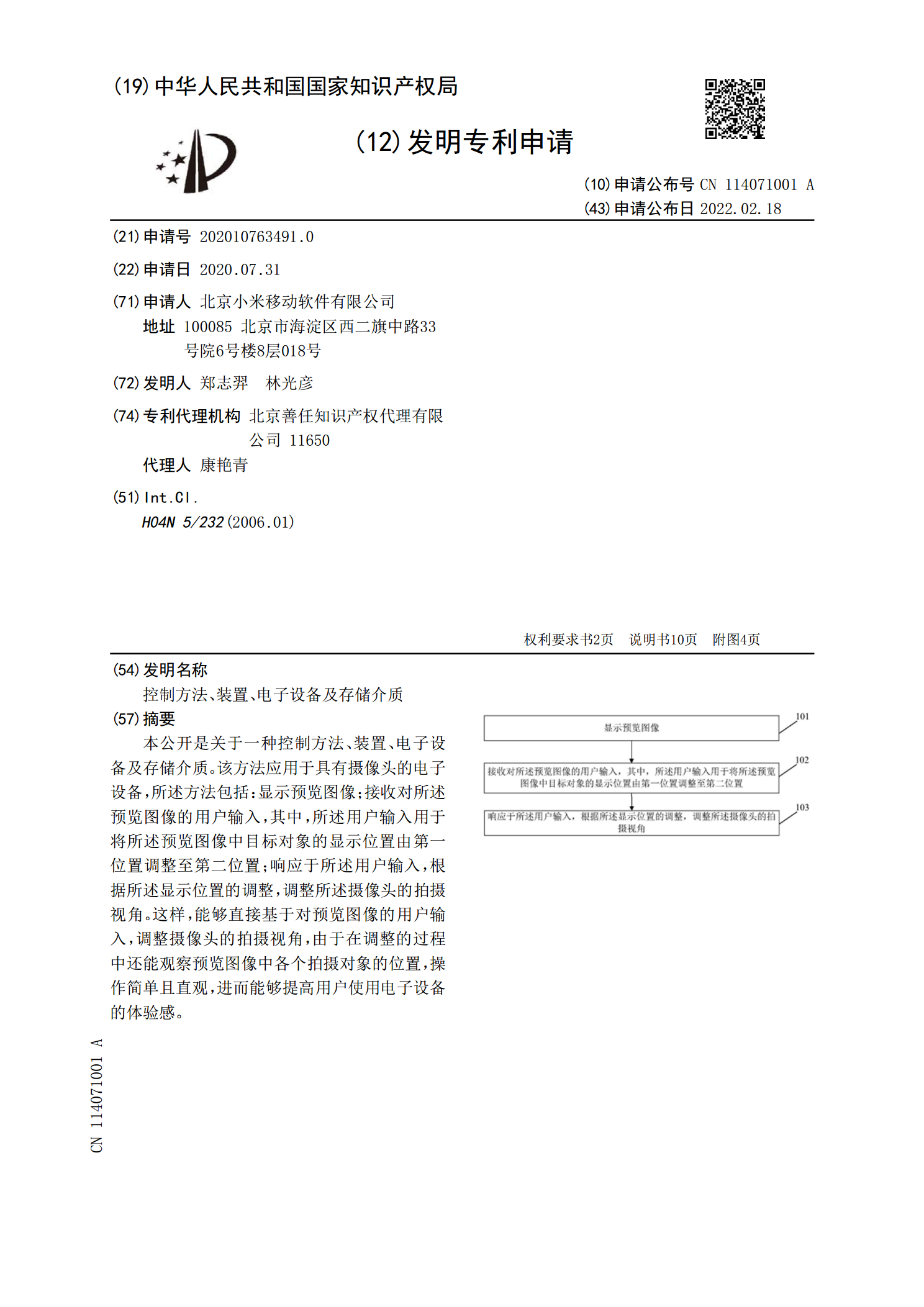
本公开是关于一种控制方法、装置、电子设备及存储介质。该方法应用于具有摄像头的电子设备,所述方法包括:显示预览图像;接收对所述预览图像的用户输入,其中,所述用户输入用于将所述预览图像中目标对象的显示位置由第一位置调整至第二位置;响应于所述用户输入,根据所述显示位置的调整,调整所述摄像头的拍摄视角。这样,能够直接基于对预览图像的用户输入,调整摄像头的拍摄视角,由于在调整的过程中还能观察预览图像中各个拍摄对象的位置,操作简单且直观,进而能够提高用户使用电子设备的体验感。