
无人机控制方法及无人机控制装置.pdf

骊蓉****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共34页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人机控制方法及无人机控制装置.pdf
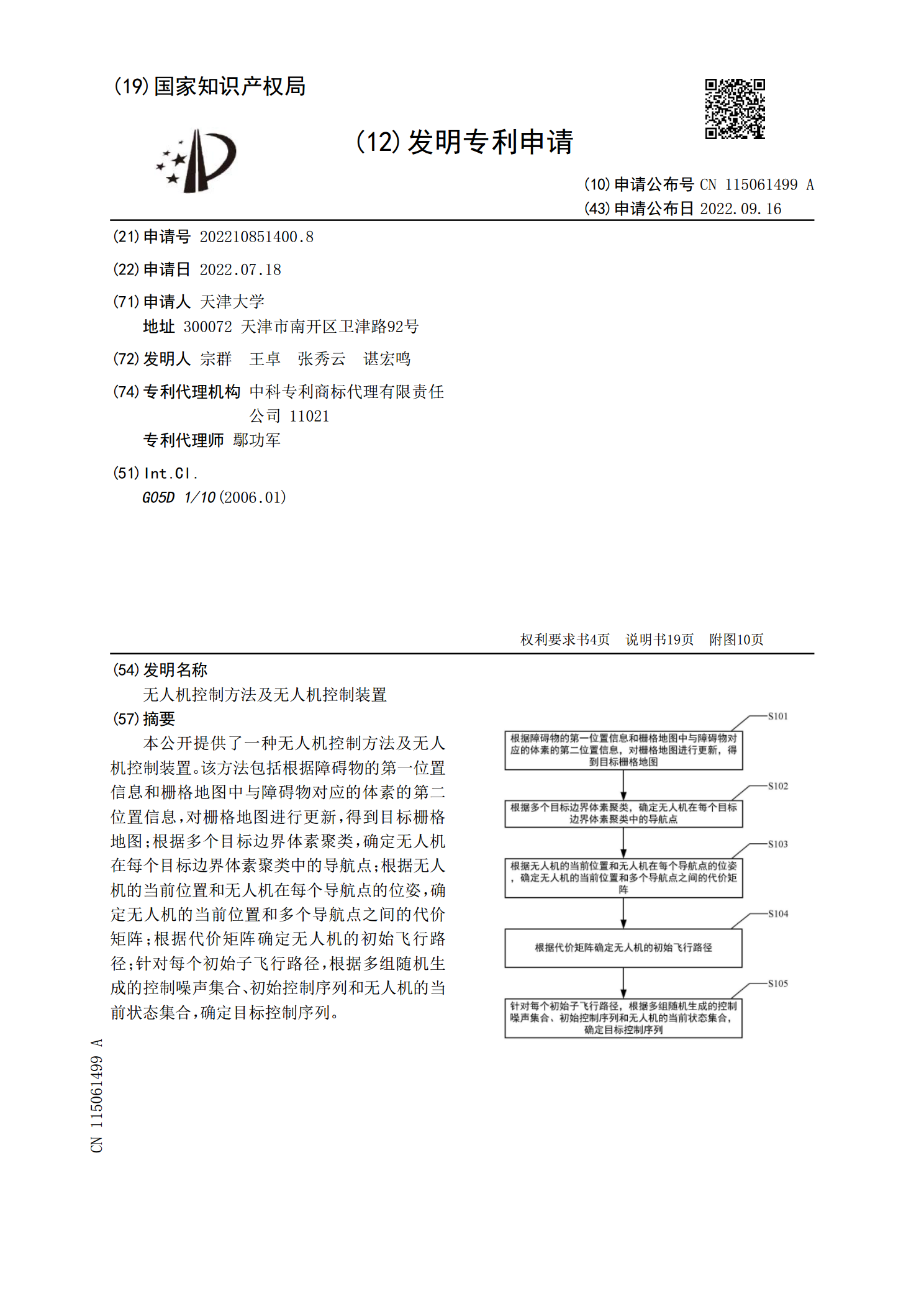
本公开提供了一种无人机控制方法及无人机控制装置。该方法包括根据障碍物的第一位置信息和栅格地图中与障碍物对应的体素的第二位置信息,对栅格地图进行更新,得到目标栅格地图;根据多个目标边界体素聚类,确定无人机在每个目标边界体素聚类中的导航点;根据无人机的当前位置和无人机在每个导航点的位姿,确定无人机的当前位置和多个导航点之间的代价矩阵;根据代价矩阵确定无人机的初始飞行路径;针对每个初始子飞行路径,根据多组随机生成的控制噪声集合、初始控制序列和无人机的当前状态集合,确定目标控制序列。

无人机控制方法、装置、无人机及系统.pdf
本发明提供了一种无人机控制方法、装置、无人机及系统,涉及无人机技术领域,该方法包括:采集音乐信息;根据该音乐信息确定控制指令;执行与该控制指令对应的操作。本发明可以通过音乐控制无人机,这种音乐控制方式较为便捷可行,免去了需要人工需操纵地面终端给无人机发送控制指令的繁琐,而且这种音乐控制方式较为新颖,易于用户接受,综合提升了用户对无人机的控制体验度。
无人机的控制方法、装置、无人机及存储介质.pdf
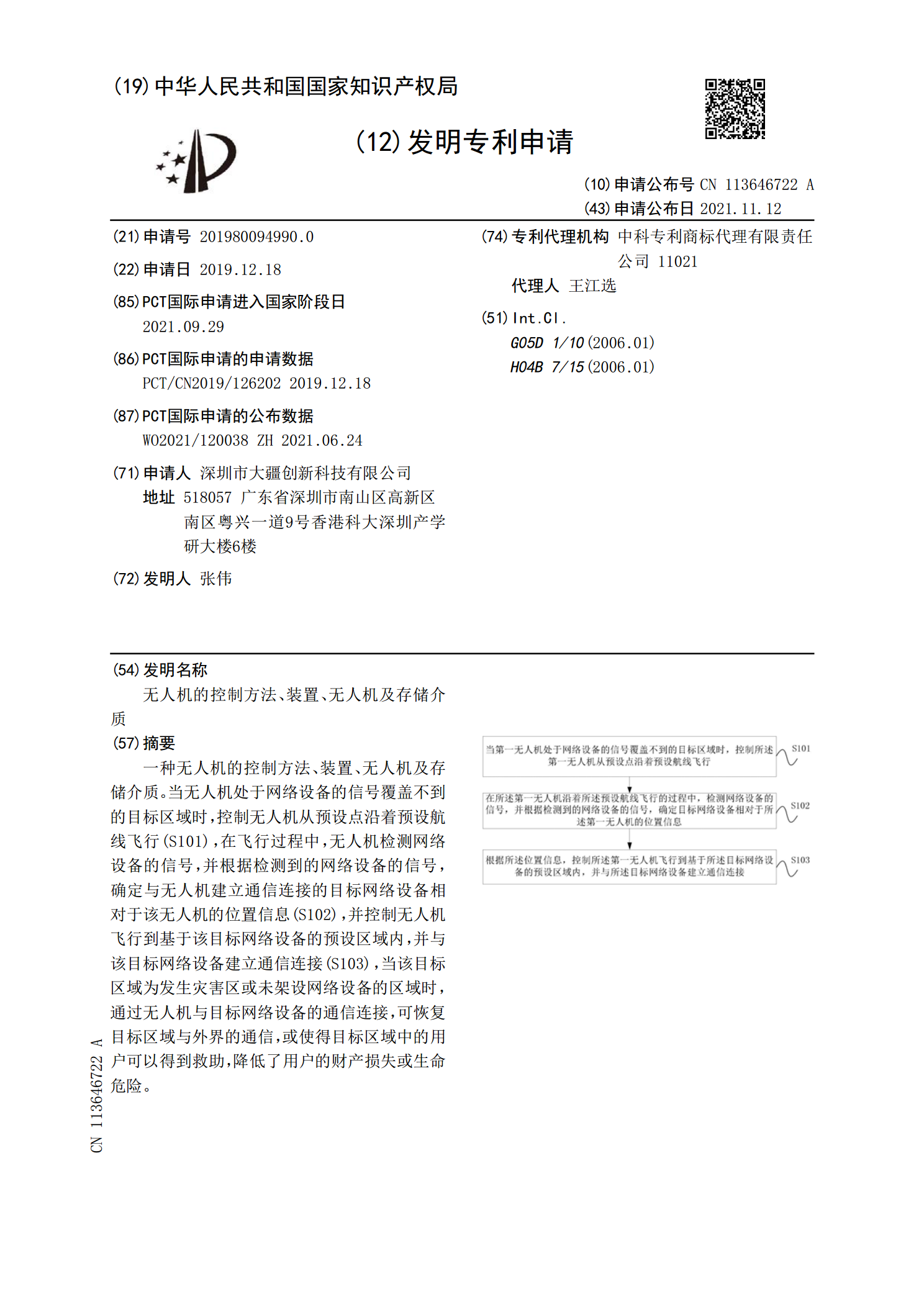
一种无人机的控制方法、装置、无人机及存储介质。当无人机处于网络设备的信号覆盖不到的目标区域时,控制无人机从预设点沿着预设航线飞行(S101),在飞行过程中,无人机检测网络设备的信号,并根据检测到的网络设备的信号,确定与无人机建立通信连接的目标网络设备相对于该无人机的位置信息(S102),并控制无人机飞行到基于该目标网络设备的预设区域内,并与该目标网络设备建立通信连接(S103),当该目标区域为发生灾害区或未架设网络设备的区域时,通过无人机与目标网络设备的通信连接,可恢复目标区域与外界的通信,或使得目标区域
无人机控制方法、装置、无人机及存储介质.pdf
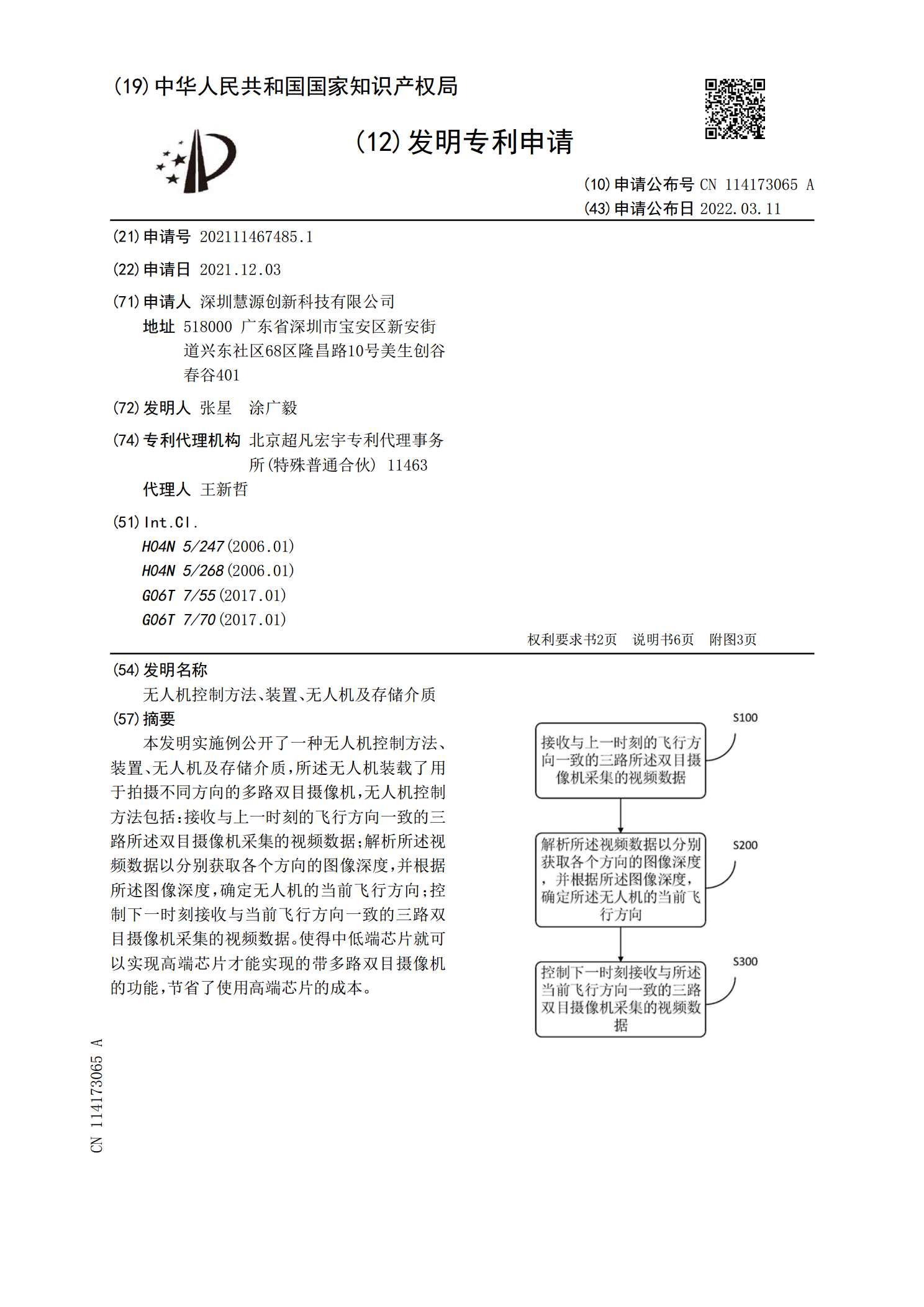
本发明实施例公开了一种无人机控制方法、装置、无人机及存储介质,所述无人机装载了用于拍摄不同方向的多路双目摄像机,无人机控制方法包括:接收与上一时刻的飞行方向一致的三路所述双目摄像机采集的视频数据;解析所述视频数据以分别获取各个方向的图像深度,并根据所述图像深度,确定无人机的当前飞行方向;控制下一时刻接收与当前飞行方向一致的三路双目摄像机采集的视频数据。使得中低端芯片就可以实现高端芯片才能实现的带多路双目摄像机的功能,节省了使用高端芯片的成本。
无人机控制方法、装置、基站和无人机.pdf
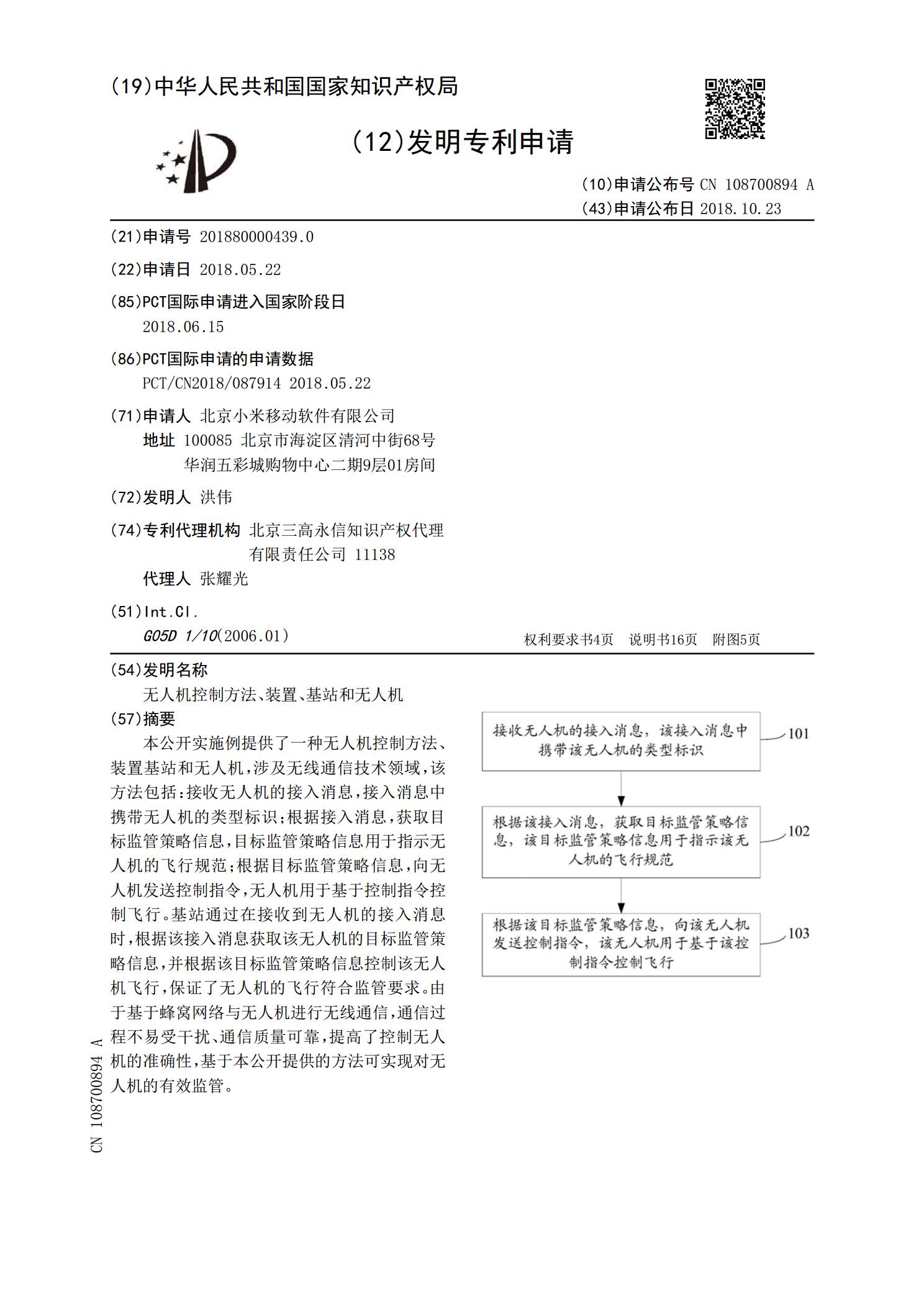
本公开实施例提供了一种无人机控制方法、装置基站和无人机,涉及无线通信技术领域,该方法包括:接收无人机的接入消息,接入消息中携带无人机的类型标识;根据接入消息,获取目标监管策略信息,目标监管策略信息用于指示无人机的飞行规范;根据目标监管策略信息,向无人机发送控制指令,无人机用于基于控制指令控制飞行。基站通过在接收到无人机的接入消息时,根据该接入消息获取该无人机的目标监管策略信息,并根据该目标监管策略信息控制该无人机飞行,保证了无人机的飞行符合监管要求。由于基于蜂窝网络与无人机进行无线通信,通信过程不易受干扰