
一种用于小型无人机的快速软抓取装置.pdf

小琛****82

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于小型无人机的快速软抓取装置.pdf
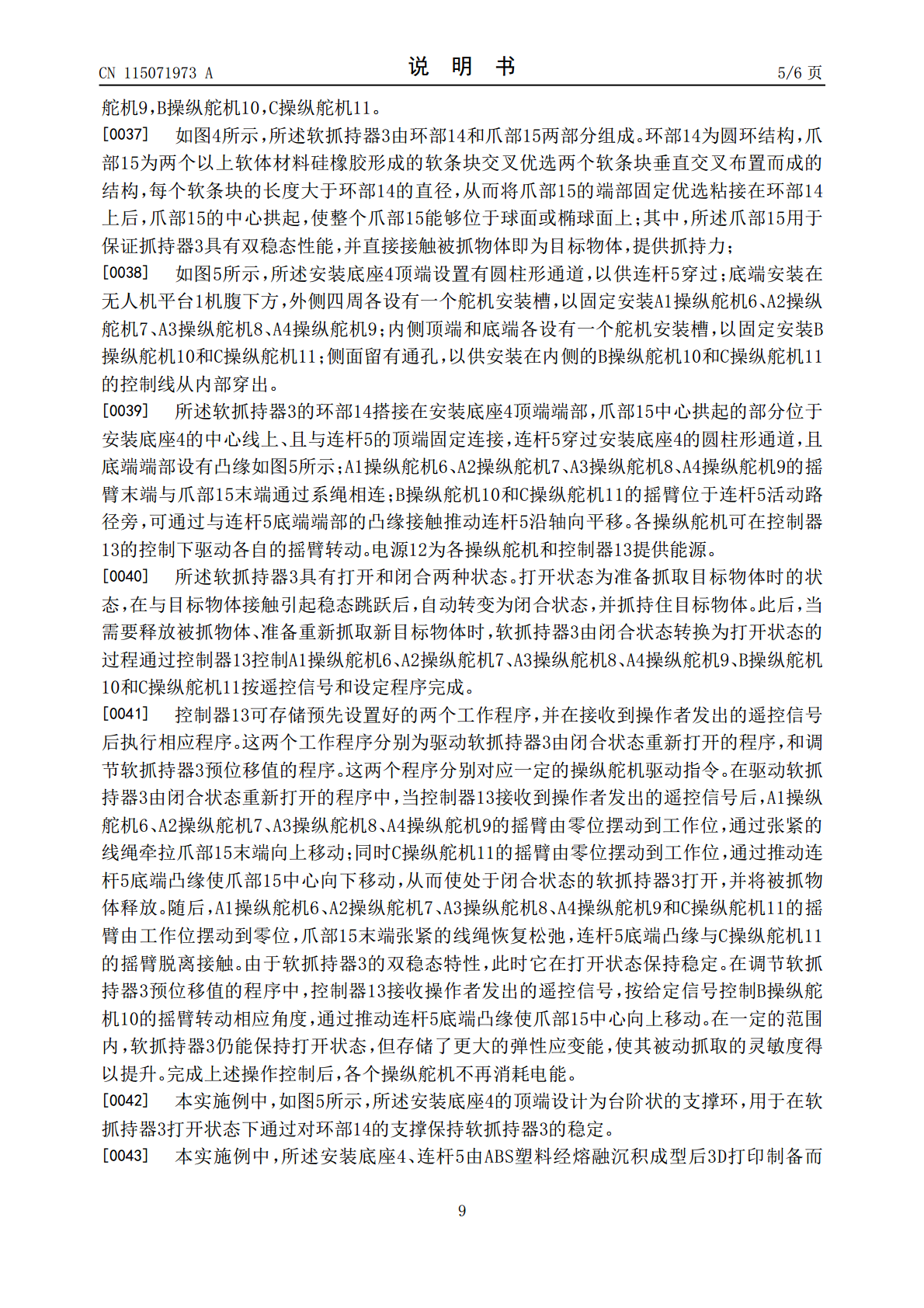
本发明公开的一种用于小型无人机的快速软抓取装置,属于无人机快速抓取技术领域。本发明主要由无人机平台搭载软抓取装置组成。软抓取装置的部件包括软抓持器、安装底座、连杆、A1操纵舵机、A2操纵舵机、A3操纵舵机、A4操纵舵机、B操纵舵机、C操纵舵机、电源和控制器。软抓持器利用其双稳态性质,在随无人机平台向下运动过程中,与目标物体发生接触、变形,发生稳态跳跃,自动抓取目标物体。本发明基于被动触发双稳态软抓手实现无人机快速目标抓取、自动释放和性能调节。本发明具有能耗低、快速抓取的优点,能够根据无人机飞行速度、目标物
一种快速抓取装置.pdf
本发明涉及一种快速抓取装置,它包括第一限位支架和第二限位支架,所述的第一限位支架的底部由左至右依次设置有侧板压合装置第一限位支架、固定装置固定板和侧板压合装置第二限位支架,所述的侧板压合装置第一限位支架的底部设置有第一侧板压合装置,所述的第一侧板压合装置的伸缩端连接有第一侧板,所述的固定装置固定板的底部设置有固定装置,所述的固定装置的伸缩端连接有压板,所述的侧板压合装置第二限位支架的底部设置有第二侧板压合装置,所述的第二侧板压合装置的伸缩端连接有第二侧板,所述的第二限位支架上设置有抓取装置,所述的抓取装置
一种无人机抓取装置.pdf
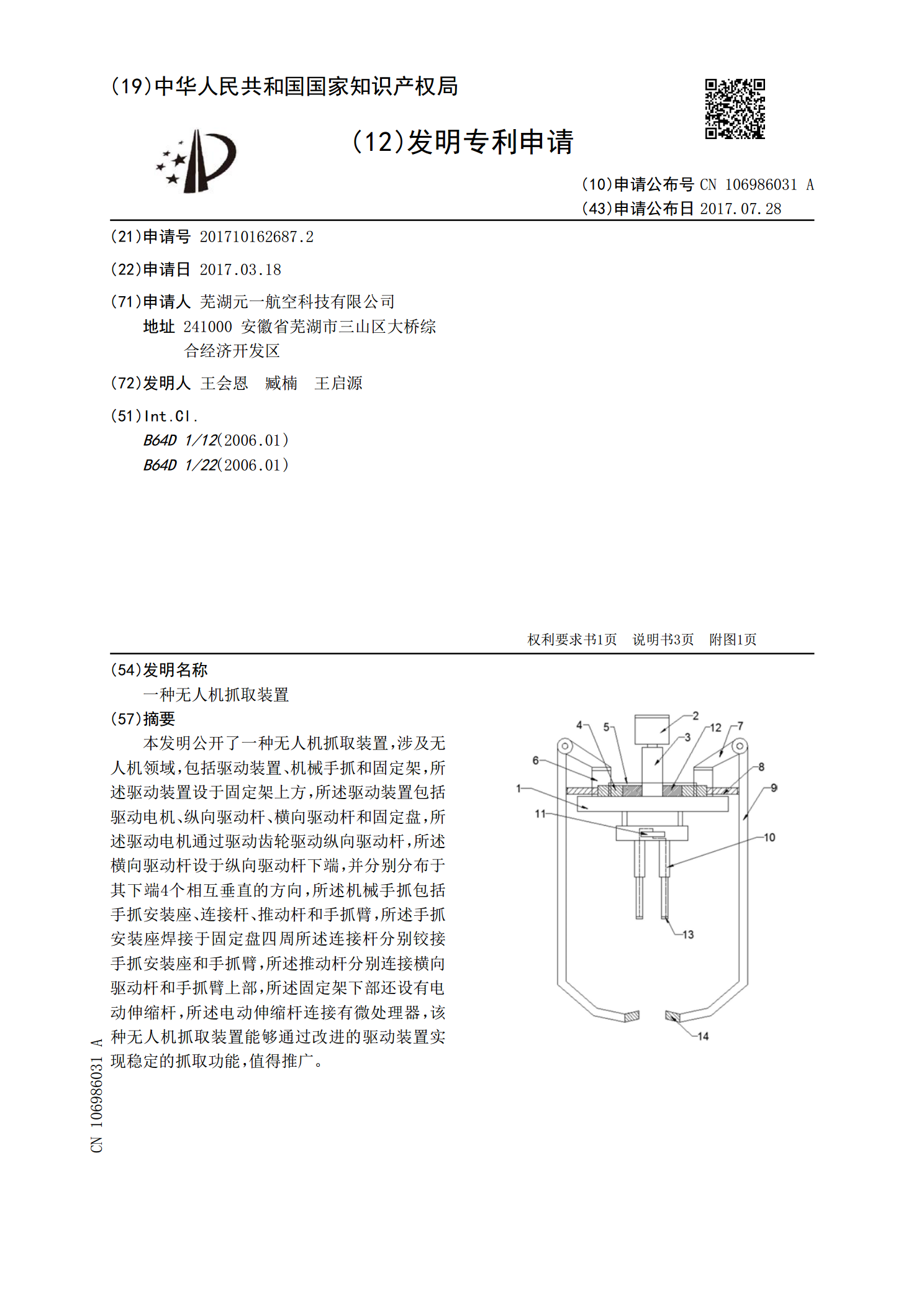
本发明公开了一种无人机抓取装置,涉及无人机领域,包括驱动装置、机械手抓和固定架,所述驱动装置设于固定架上方,所述驱动装置包括驱动电机、纵向驱动杆、横向驱动杆和固定盘,所述驱动电机通过驱动齿轮驱动纵向驱动杆,所述横向驱动杆设于纵向驱动杆下端,并分别分布于其下端4个相互垂直的方向,所述机械手抓包括手抓安装座、连接杆、推动杆和手抓臂,所述手抓安装座焊接于固定盘四周所述连接杆分别铰接手抓安装座和手抓臂,所述推动杆分别连接横向驱动杆和手抓臂上部,所述固定架下部还设有电动伸缩杆,所述电动伸缩杆连接有微处理器,该种无人
一种小型吊装抓取装置.pdf
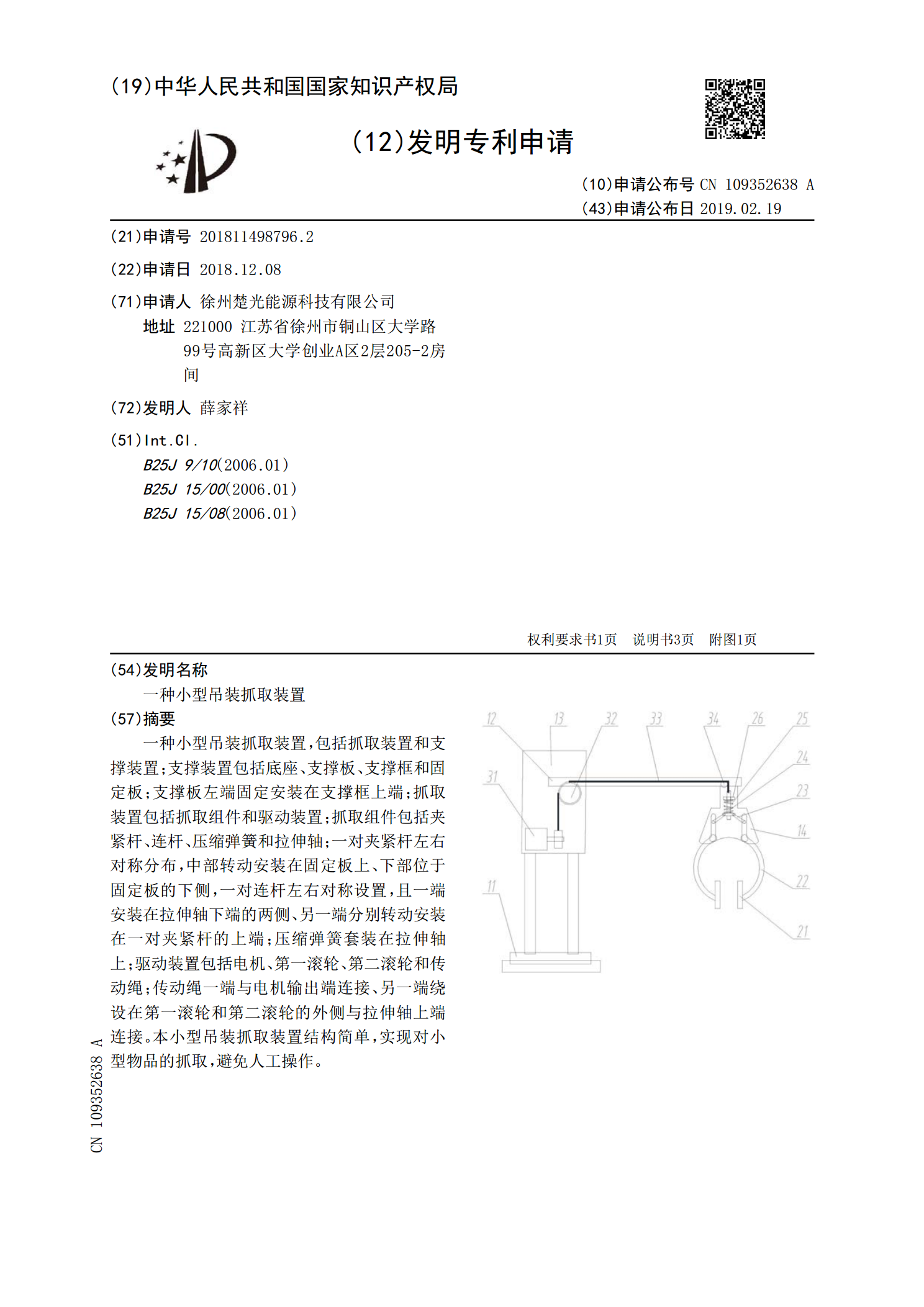
一种小型吊装抓取装置,包括抓取装置和支撑装置;支撑装置包括底座、支撑板、支撑框和固定板;支撑板左端固定安装在支撑框上端;抓取装置包括抓取组件和驱动装置;抓取组件包括夹紧杆、连杆、压缩弹簧和拉伸轴;一对夹紧杆左右对称分布,中部转动安装在固定板上、下部位于固定板的下侧,一对连杆左右对称设置,且一端安装在拉伸轴下端的两侧、另一端分别转动安装在一对夹紧杆的上端;压缩弹簧套装在拉伸轴上;驱动装置包括电机、第一滚轮、第二滚轮和传动绳;传动绳一端与电机输出端连接、另一端绕设在第一滚轮和第二滚轮的外侧与拉伸轴上端连接。本
一种用于小型无人机的吊舱收放装置.pdf
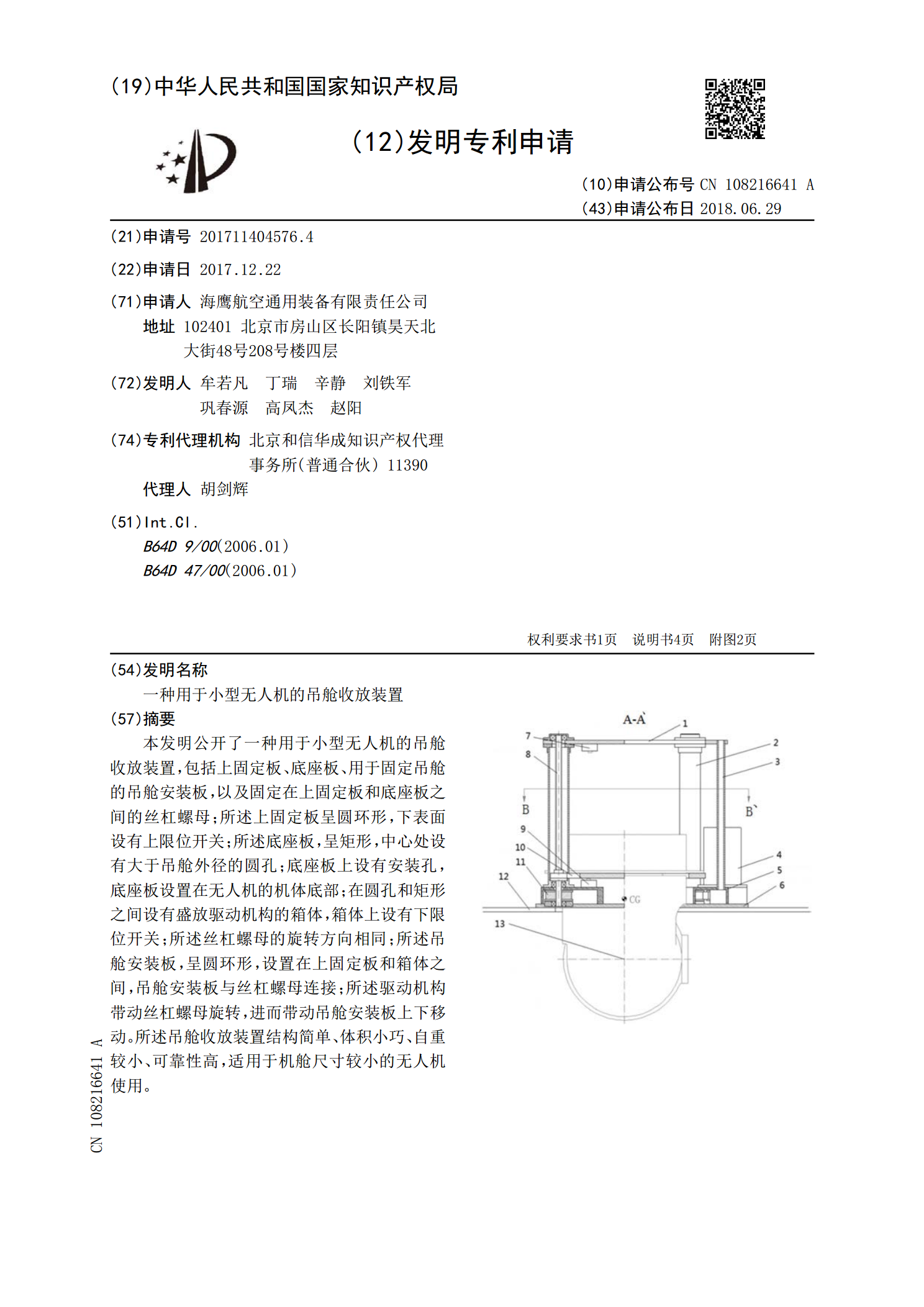
本发明公开了一种用于小型无人机的吊舱收放装置,包括上固定板、底座板、用于固定吊舱的吊舱安装板,以及固定在上固定板和底座板之间的丝杠螺母;所述上固定板呈圆环形,下表面设有上限位开关;所述底座板,呈矩形,中心处设有大于吊舱外径的圆孔;底座板上设有安装孔,底座板设置在无人机的机体底部;在圆孔和矩形之间设有盛放驱动机构的箱体,箱体上设有下限位开关;所述丝杠螺母的旋转方向相同;所述吊舱安装板,呈圆环形,设置在上固定板和箱体之间,吊舱安装板与丝杠螺母连接;所述驱动机构带动丝杠螺母旋转,进而带动吊舱安装板上下移动。所述