
路径规划方法、装置、无人车及存储介质.pdf

Th****84

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
路径规划方法、装置、无人车及存储介质.pdf
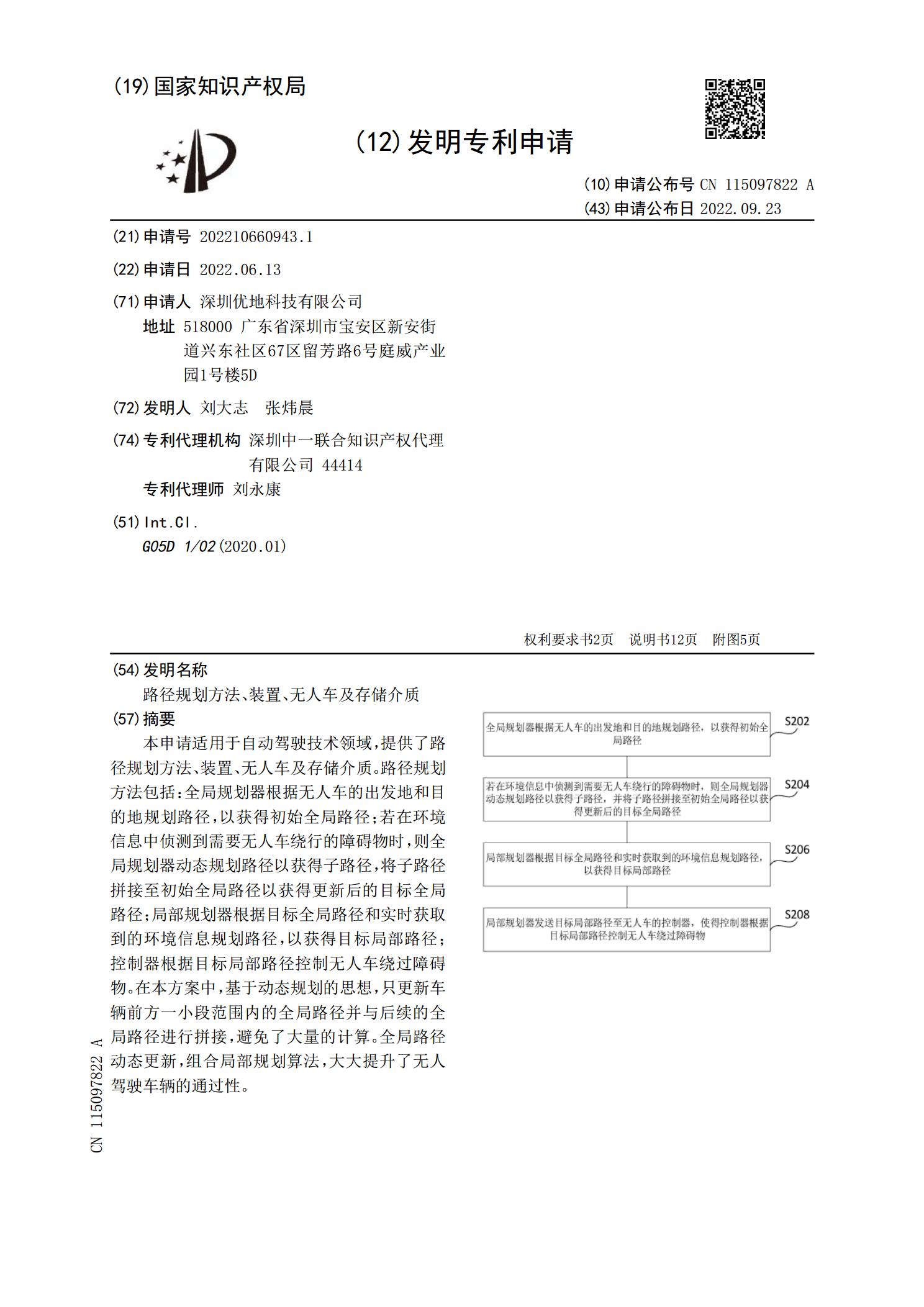
本申请适用于自动驾驶技术领域,提供了路径规划方法、装置、无人车及存储介质。路径规划方法包括:全局规划器根据无人车的出发地和目的地规划路径,以获得初始全局路径;若在环境信息中侦测到需要无人车绕行的障碍物时,则全局规划器动态规划路径以获得子路径,将子路径拼接至初始全局路径以获得更新后的目标全局路径;局部规划器根据目标全局路径和实时获取到的环境信息规划路径,以获得目标局部路径;控制器根据目标局部路径控制无人车绕过障碍物。在本方案中,基于动态规划的思想,只更新车辆前方一小段范围内的全局路径并与后续的全局路径进行拼
无人驾驶车路径规划方法、装置、设备及存储介质.pdf
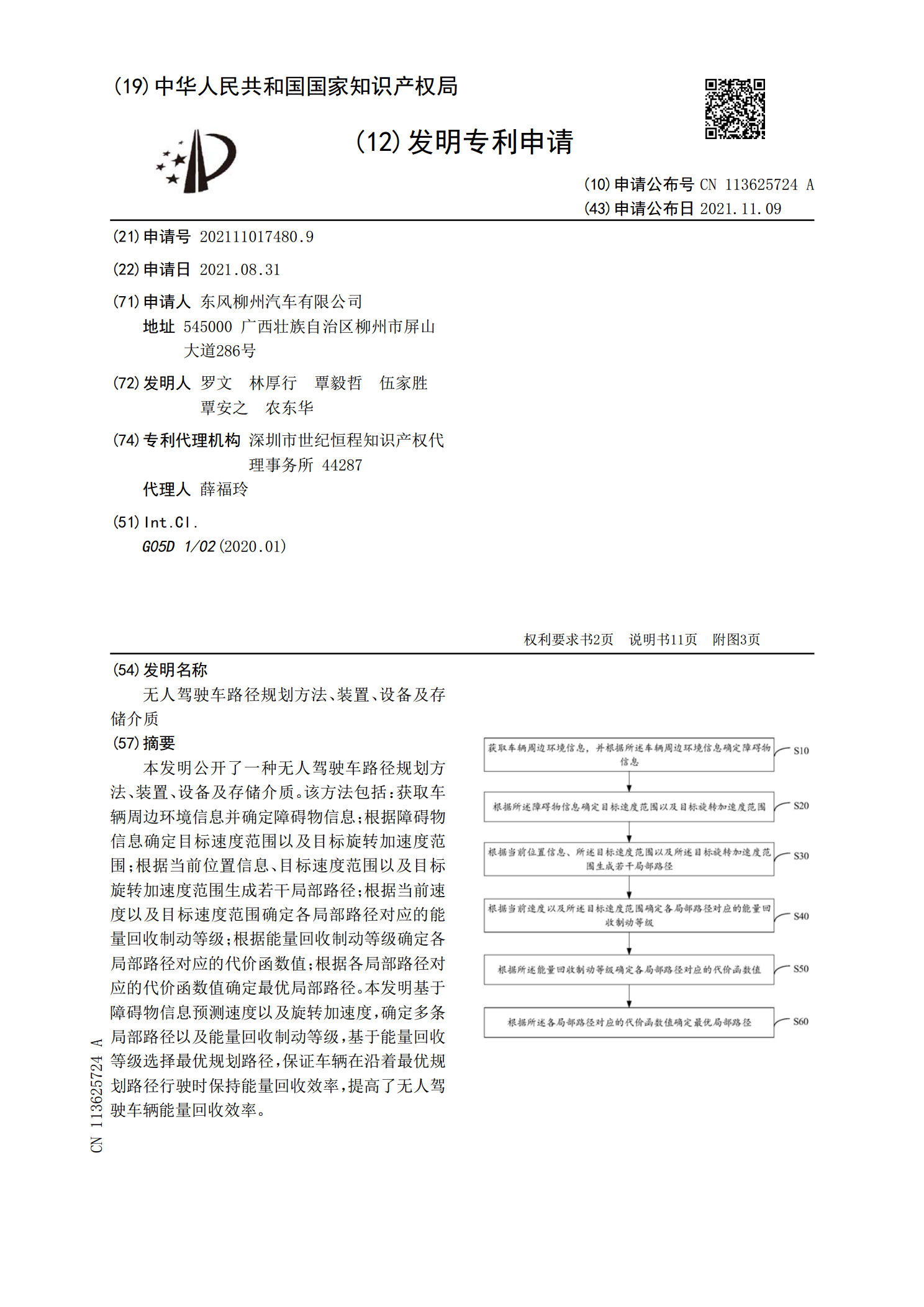
本发明公开了一种无人驾驶车路径规划方法、装置、设备及存储介质。该方法包括:获取车辆周边环境信息并确定障碍物信息;根据障碍物信息确定目标速度范围以及目标旋转加速度范围;根据当前位置信息、目标速度范围以及目标旋转加速度范围生成若干局部路径;根据当前速度以及目标速度范围确定各局部路径对应的能量回收制动等级;根据能量回收制动等级确定各局部路径对应的代价函数值;根据各局部路径对应的代价函数值确定最优局部路径。本发明基于障碍物信息预测速度以及旋转加速度,确定多条局部路径以及能量回收制动等级,基于能量回收等级选择最优规
无人车路径规划方法及装置、电子设备、存储介质.pdf
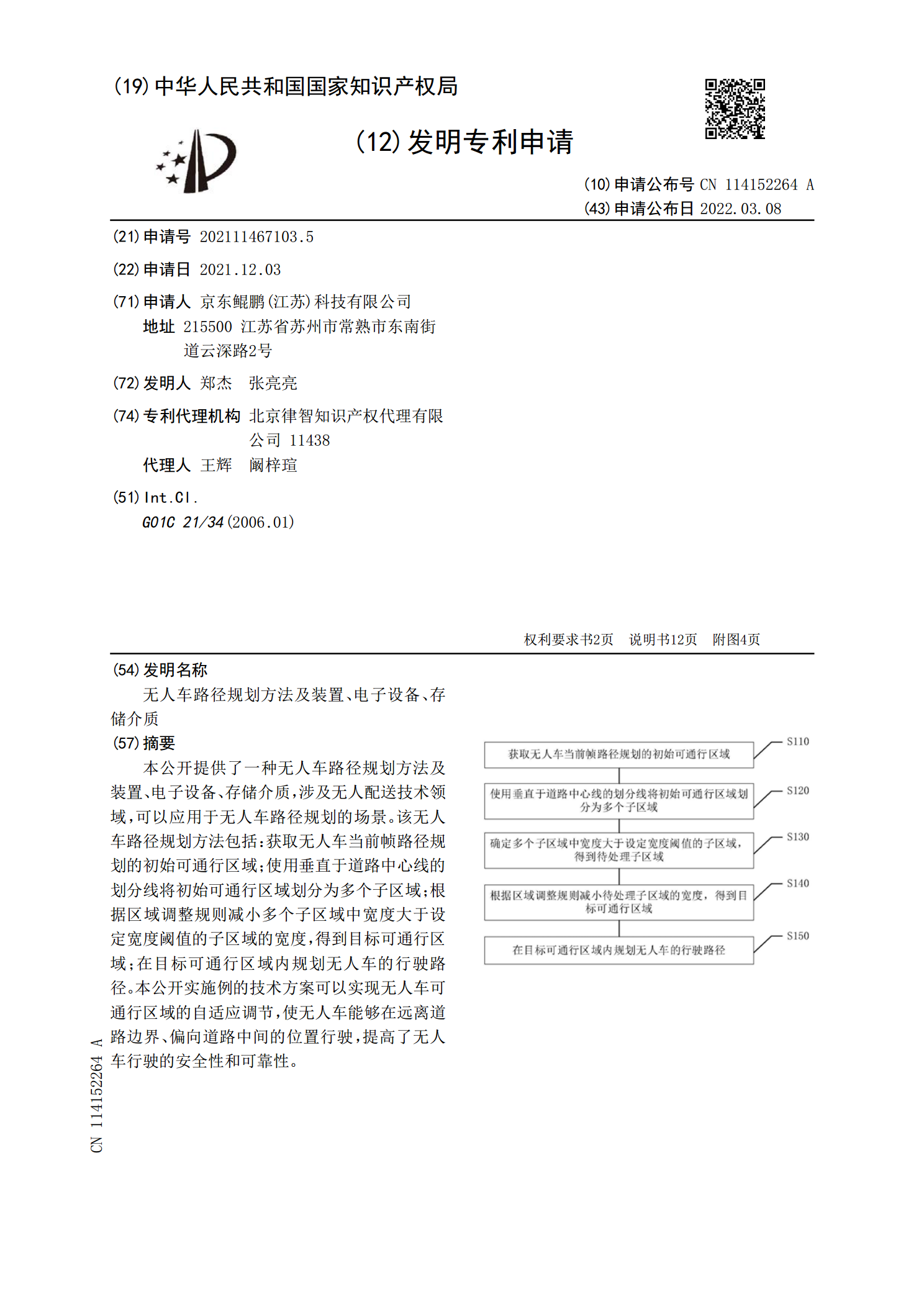
本公开提供了一种无人车路径规划方法及装置、电子设备、存储介质,涉及无人配送技术领域,可以应用于无人车路径规划的场景。该无人车路径规划方法包括:获取无人车当前帧路径规划的初始可通行区域;使用垂直于道路中心线的划分线将初始可通行区域划分为多个子区域;根据区域调整规则减小多个子区域中宽度大于设定宽度阈值的子区域的宽度,得到目标可通行区域;在目标可通行区域内规划无人车的行驶路径。本公开实施例的技术方案可以实现无人车可通行区域的自适应调节,使无人车能够在远离道路边界、偏向道路中间的位置行驶,提高了无人车行驶的安全性
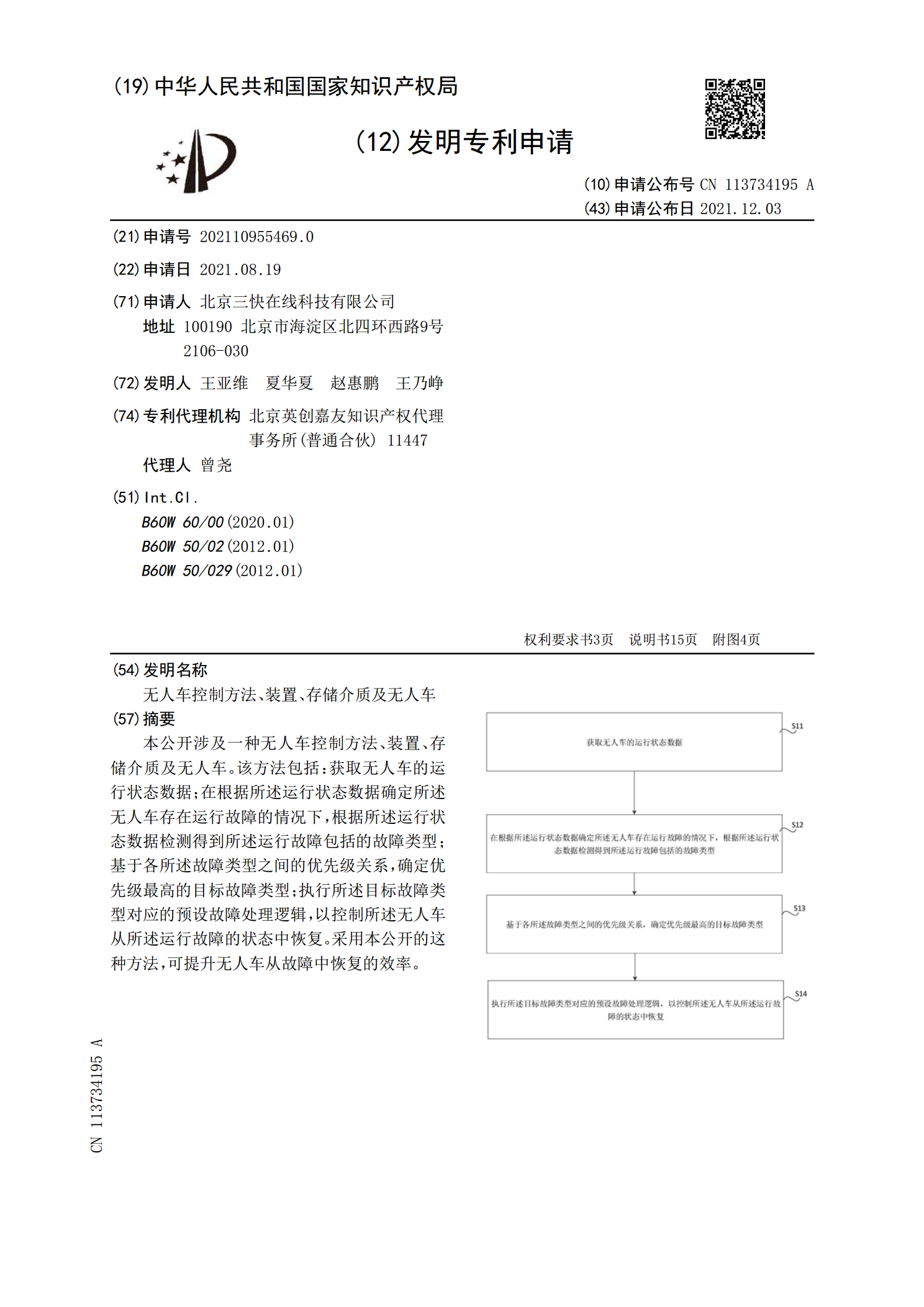
无人车控制方法、装置、存储介质及无人车.pdf
本公开涉及一种无人车控制方法、装置、存储介质及无人车。该方法包括:获取无人车的运行状态数据;在根据所述运行状态数据确定所述无人车存在运行故障的情况下,根据所述运行状态数据检测得到所述运行故障包括的故障类型;基于各所述故障类型之间的优先级关系,确定优先级最高的目标故障类型;执行所述目标故障类型对应的预设故障处理逻辑,以控制所述无人车从所述运行故障的状态中恢复。采用本公开的这种方法,可提升无人车从故障中恢复的效率。
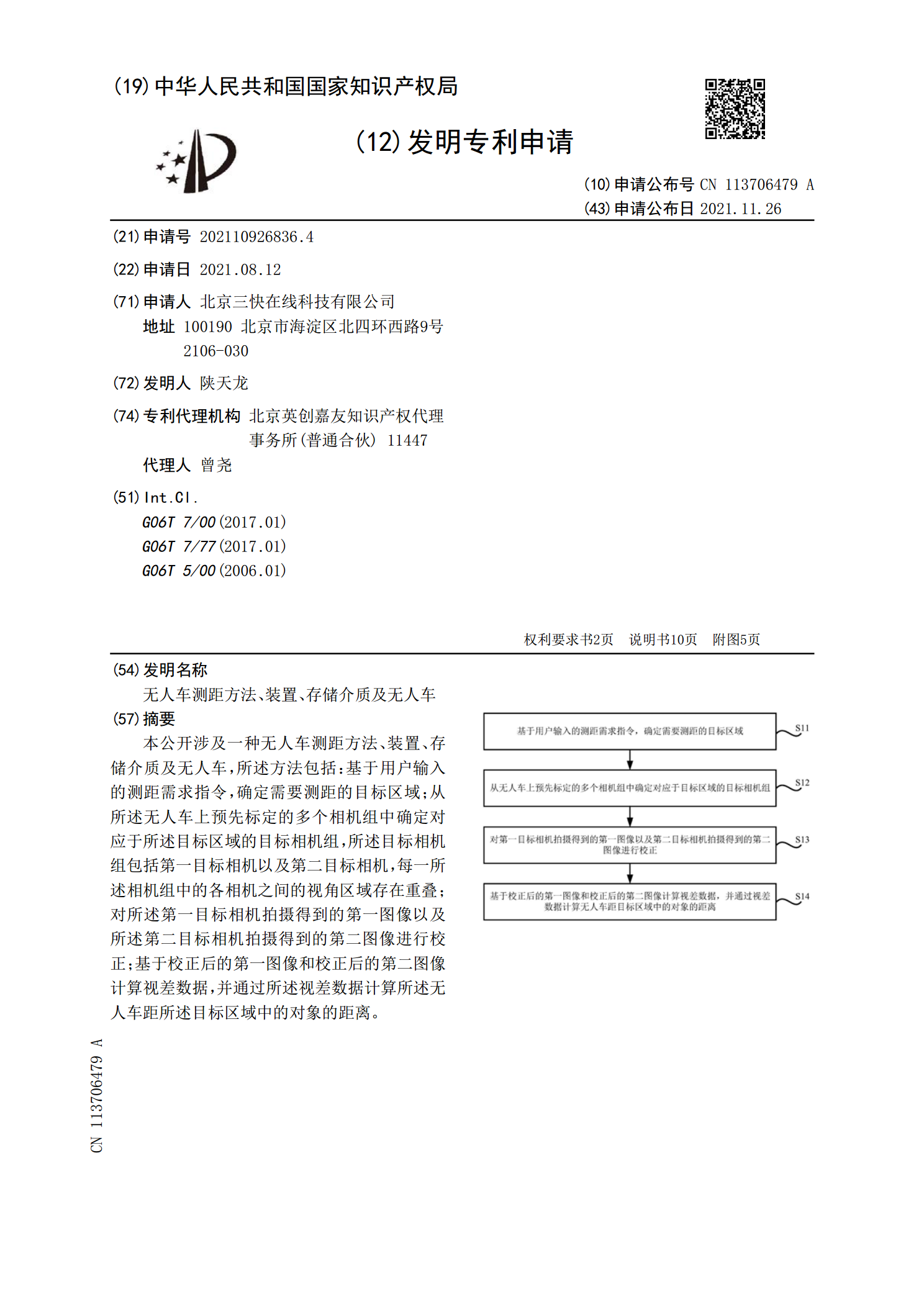
无人车测距方法、装置、存储介质及无人车.pdf
本公开涉及一种无人车测距方法、装置、存储介质及无人车,所述方法包括:基于用户输入的测距需求指令,确定需要测距的目标区域;从所述无人车上预先标定的多个相机组中确定对应于所述目标区域的目标相机组,所述目标相机组包括第一目标相机以及第二目标相机,每一所述相机组中的各相机之间的视角区域存在重叠;对所述第一目标相机拍摄得到的第一图像以及所述第二目标相机拍摄得到的第二图像进行校正;基于校正后的第一图像和校正后的第二图像计算视差数据,并通过所述视差数据计算所述无人车距所述目标区域中的对象的距离。