
基于声呐图像的AI水下目标检测与定位方法.pdf

玄静****写意

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于声呐图像的AI水下目标检测与定位方法.pdf
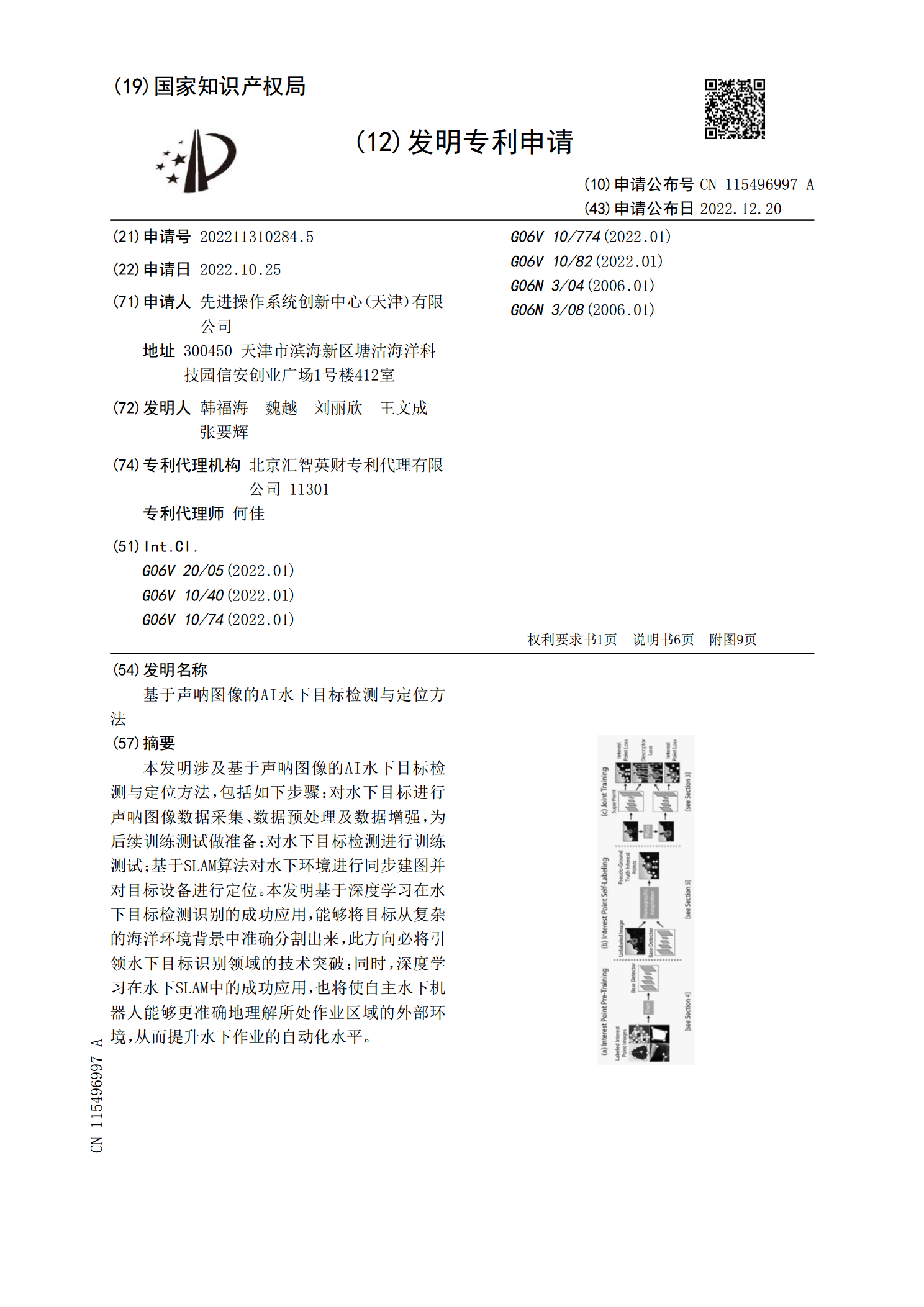
本发明涉及基于声呐图像的AI水下目标检测与定位方法,包括如下步骤:对水下目标进行声呐图像数据采集、数据预处理及数据增强,为后续训练测试做准备;对水下目标检测进行训练测试;基于SLAM算法对水下环境进行同步建图并对目标设备进行定位。本发明基于深度学习在水下目标检测识别的成功应用,能够将目标从复杂的海洋环境背景中准确分割出来,此方向必将引领水下目标识别领域的技术突破;同时,深度学习在水下SLAM中的成功应用,也将使自主水下机器人能够更准确地理解所处作业区域的外部环境,从而提升水下作业的自动化水平。
基于Yolo-v3算法的水下声呐侧扫图像小目标检测方法.pdf
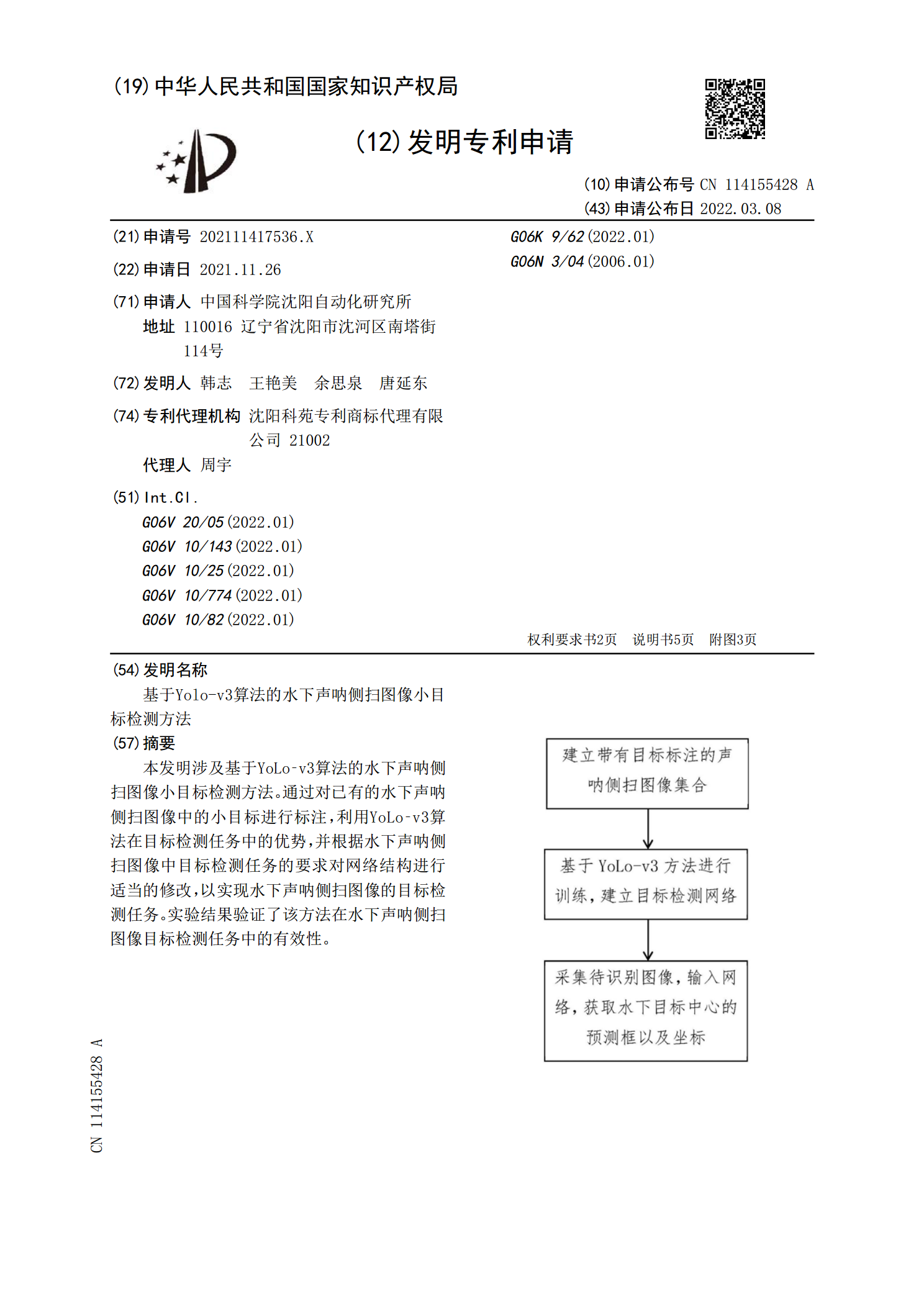
本发明涉及基于YoLo‑v3算法的水下声呐侧扫图像小目标检测方法。通过对已有的水下声呐侧扫图像中的小目标进行标注,利用YoLo‑v3算法在目标检测任务中的优势,并根据水下声呐侧扫图像中目标检测任务的要求对网络结构进行适当的修改,以实现水下声呐侧扫图像的目标检测任务。实验结果验证了该方法在水下声呐侧扫图像目标检测任务中的有效性。
一种基于声呐图像的目标检测方法.pdf
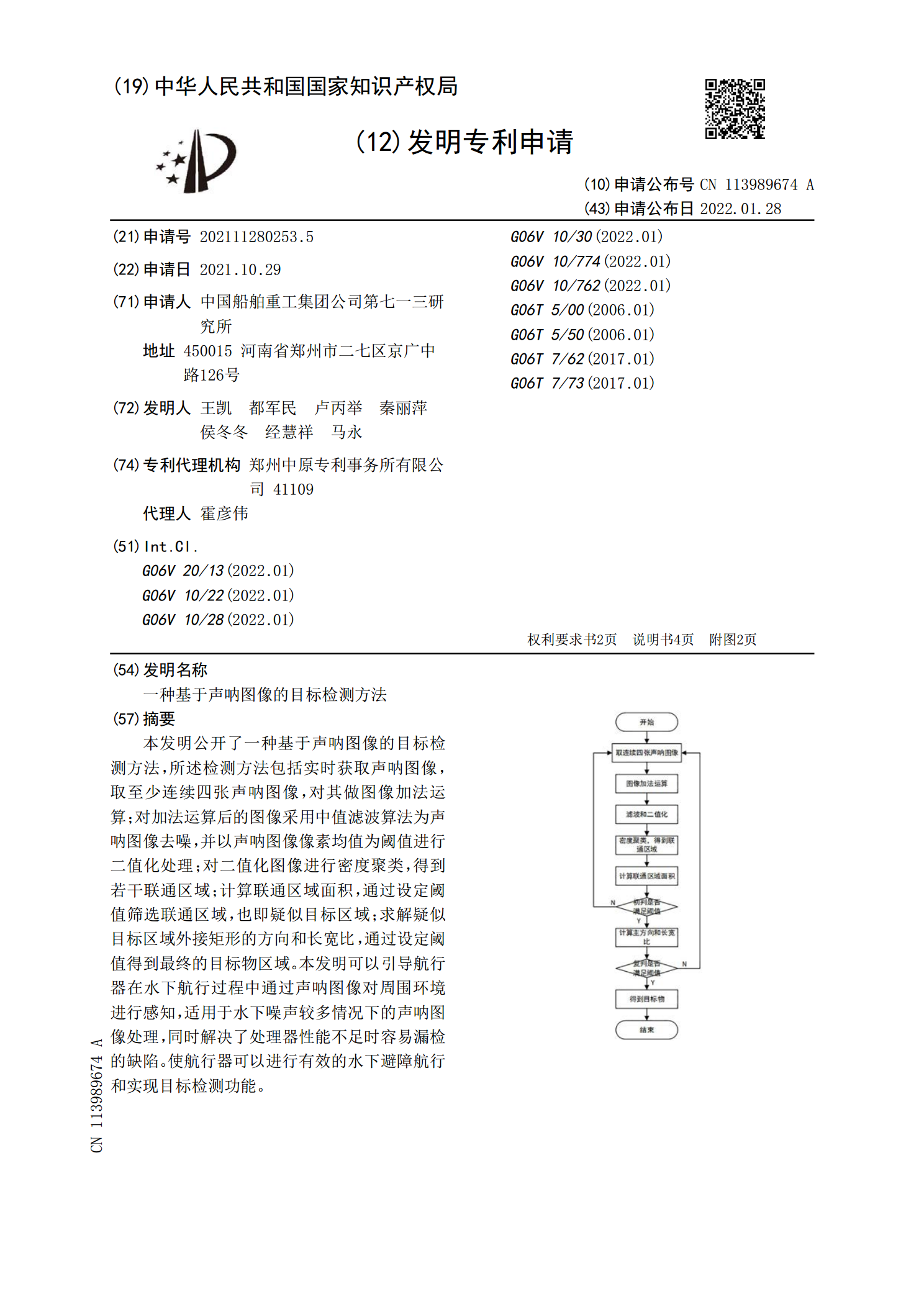
本发明公开了一种基于声呐图像的目标检测方法,所述检测方法包括实时获取声呐图像,取至少连续四张声呐图像,对其做图像加法运算;对加法运算后的图像采用中值滤波算法为声呐图像去噪,并以声呐图像像素均值为阈值进行二值化处理;对二值化图像进行密度聚类,得到若干联通区域;计算联通区域面积,通过设定阈值筛选联通区域,也即疑似目标区域;求解疑似目标区域外接矩形的方向和长宽比,通过设定阈值得到最终的目标物区域。本发明可以引导航行器在水下航行过程中通过声呐图像对周围环境进行感知,适用于水下噪声较多情况下的声呐图像处理,同时解决
基于水下声呐定位的船舶清洗方法、系统及介质.pdf
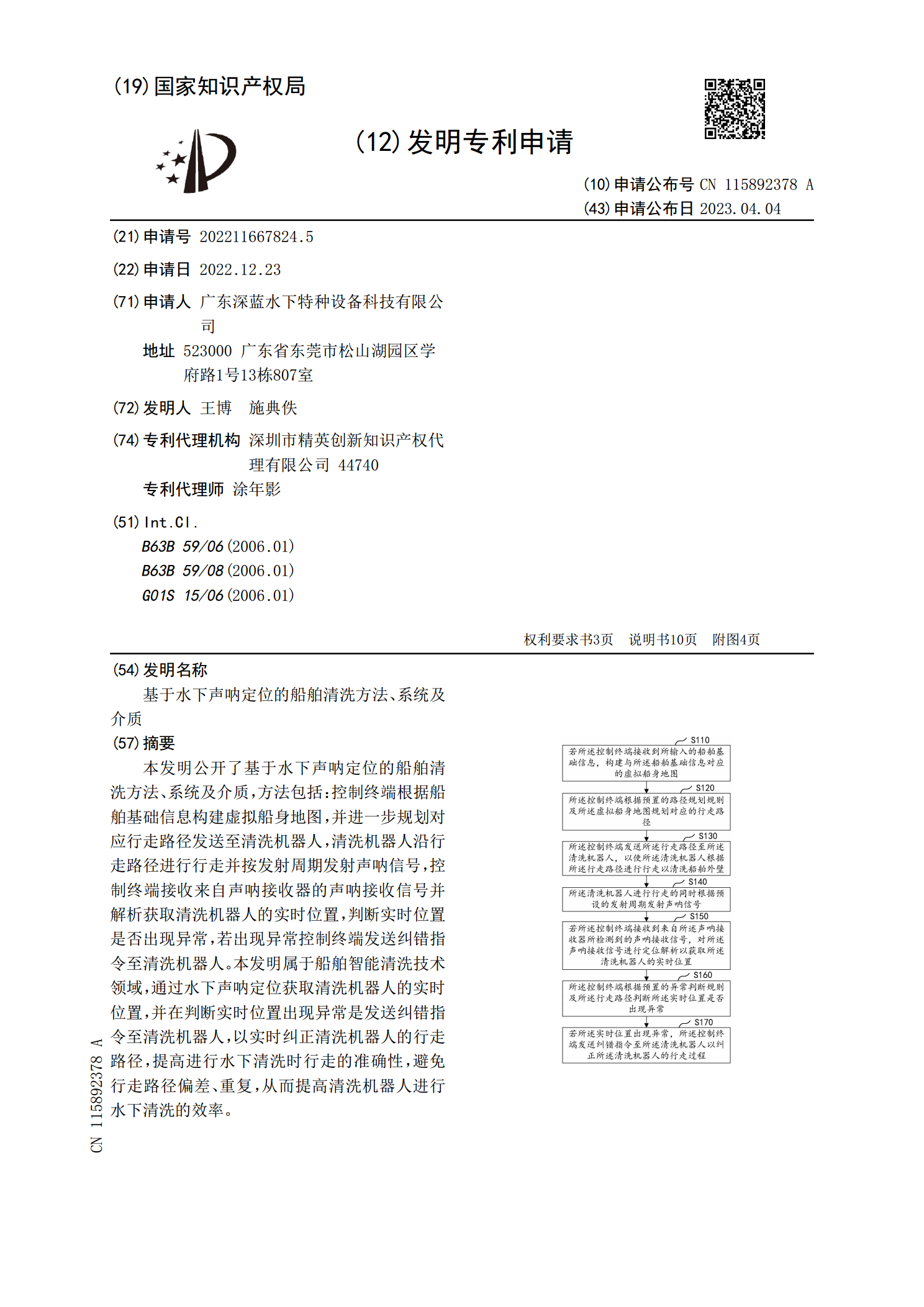
本发明公开了基于水下声呐定位的船舶清洗方法、系统及介质,方法包括:控制终端根据船舶基础信息构建虚拟船身地图,并进一步规划对应行走路径发送至清洗机器人,清洗机器人沿行走路径进行行走并按发射周期发射声呐信号,控制终端接收来自声呐接收器的声呐接收信号并解析获取清洗机器人的实时位置,判断实时位置是否出现异常,若出现异常控制终端发送纠错指令至清洗机器人。本发明属于船舶智能清洗技术领域,通过水下声呐定位获取清洗机器人的实时位置,并在判断实时位置出现异常是发送纠错指令至清洗机器人,以实时纠正清洗机器人的行走路径,提高进
一种基于侧扫声呐的大坝水下裂缝检测方法.pdf
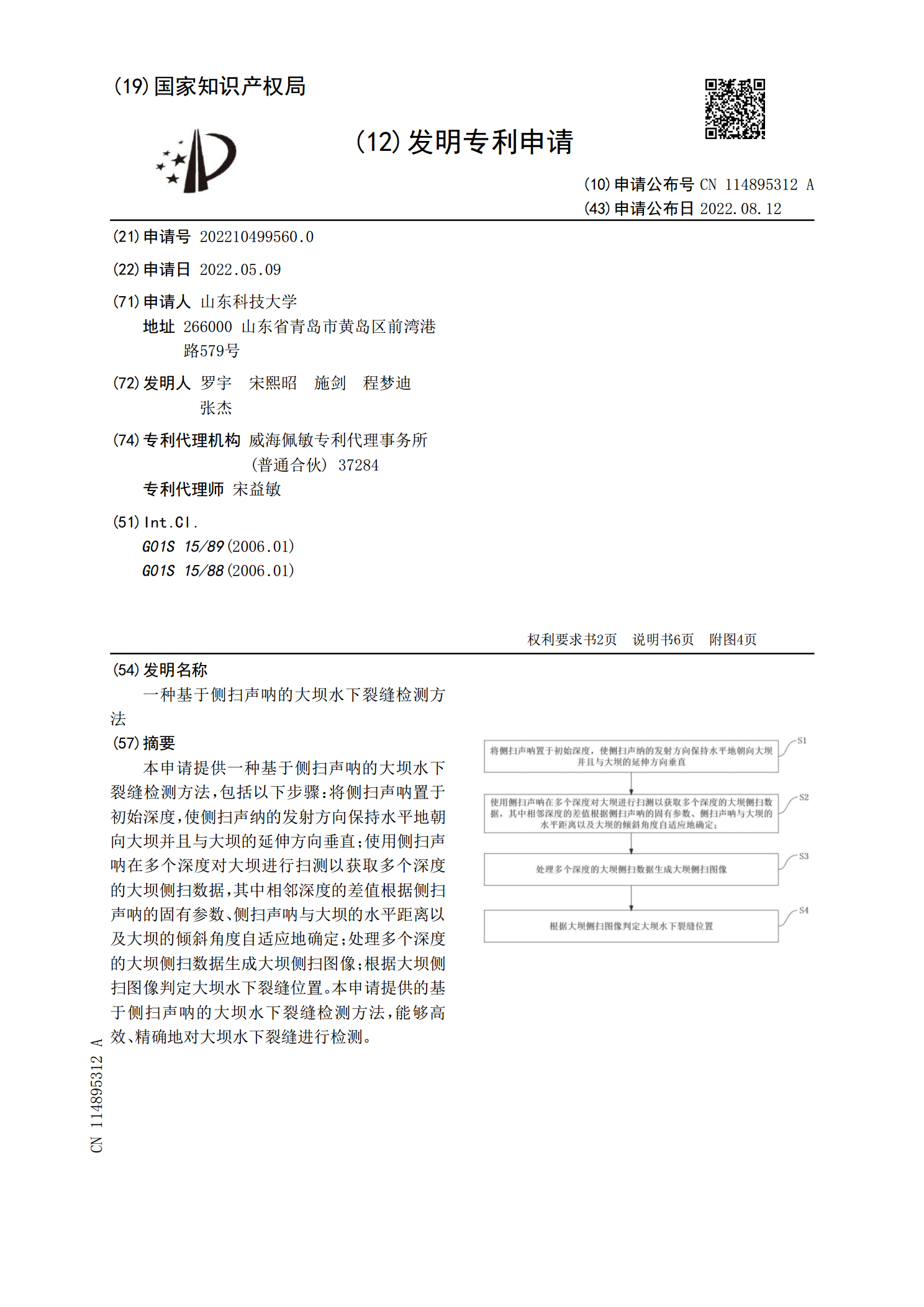
本申请提供一种基于侧扫声呐的大坝水下裂缝检测方法,包括以下步骤:将侧扫声呐置于初始深度,使侧扫声纳的发射方向保持水平地朝向大坝并且与大坝的延伸方向垂直;使用侧扫声呐在多个深度对大坝进行扫测以获取多个深度的大坝侧扫数据,其中相邻深度的差值根据侧扫声呐的固有参数、侧扫声呐与大坝的水平距离以及大坝的倾斜角度自适应地确定;处理多个深度的大坝侧扫数据生成大坝侧扫图像;根据大坝侧扫图像判定大坝水下裂缝位置。本申请提供的基于侧扫声呐的大坝水下裂缝检测方法,能够高效、精确地对大坝水下裂缝进行检测。