
基于Yolo-v3算法的水下声呐侧扫图像小目标检测方法.pdf

努力****妙风

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于Yolo-v3算法的水下声呐侧扫图像小目标检测方法.pdf
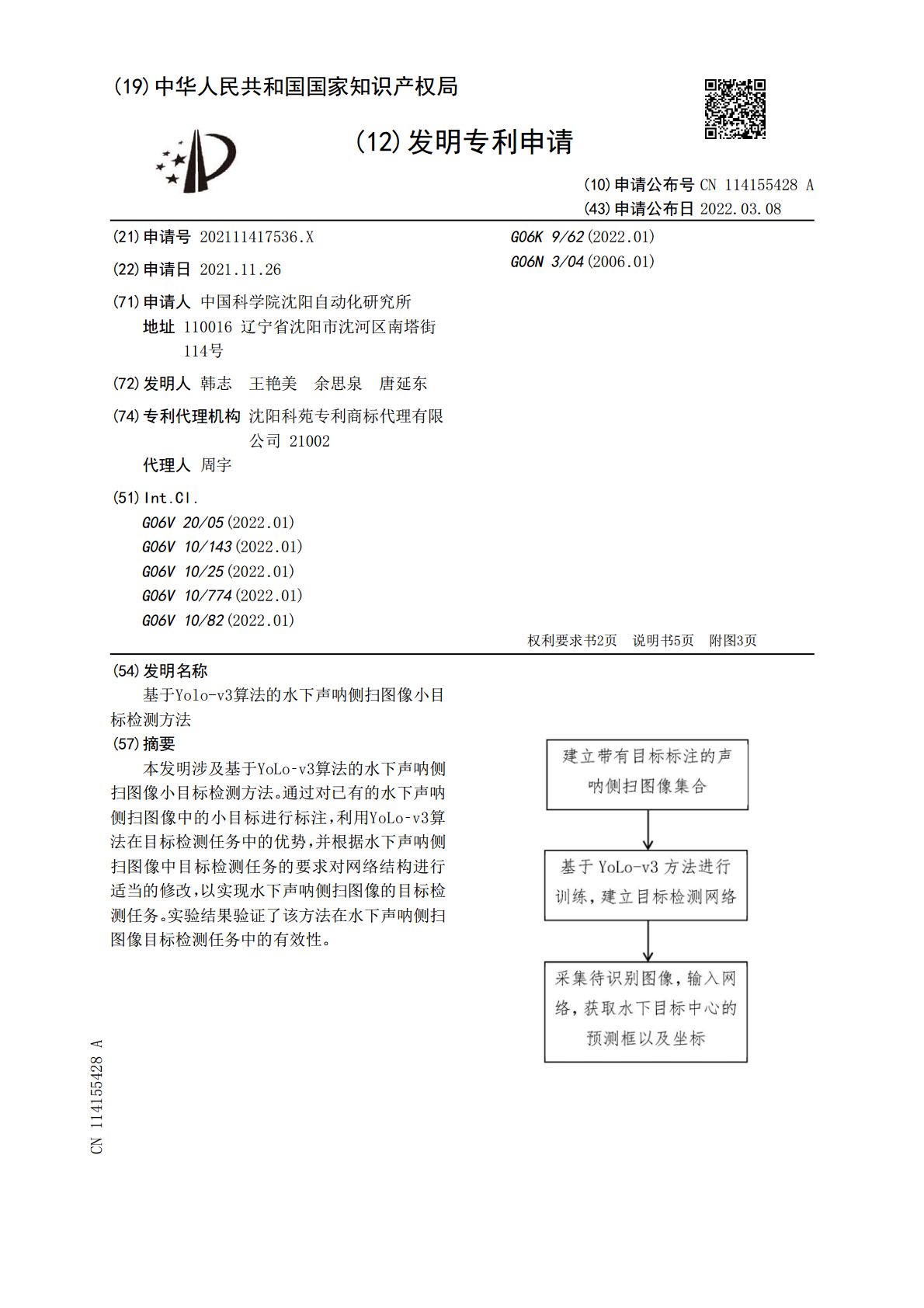
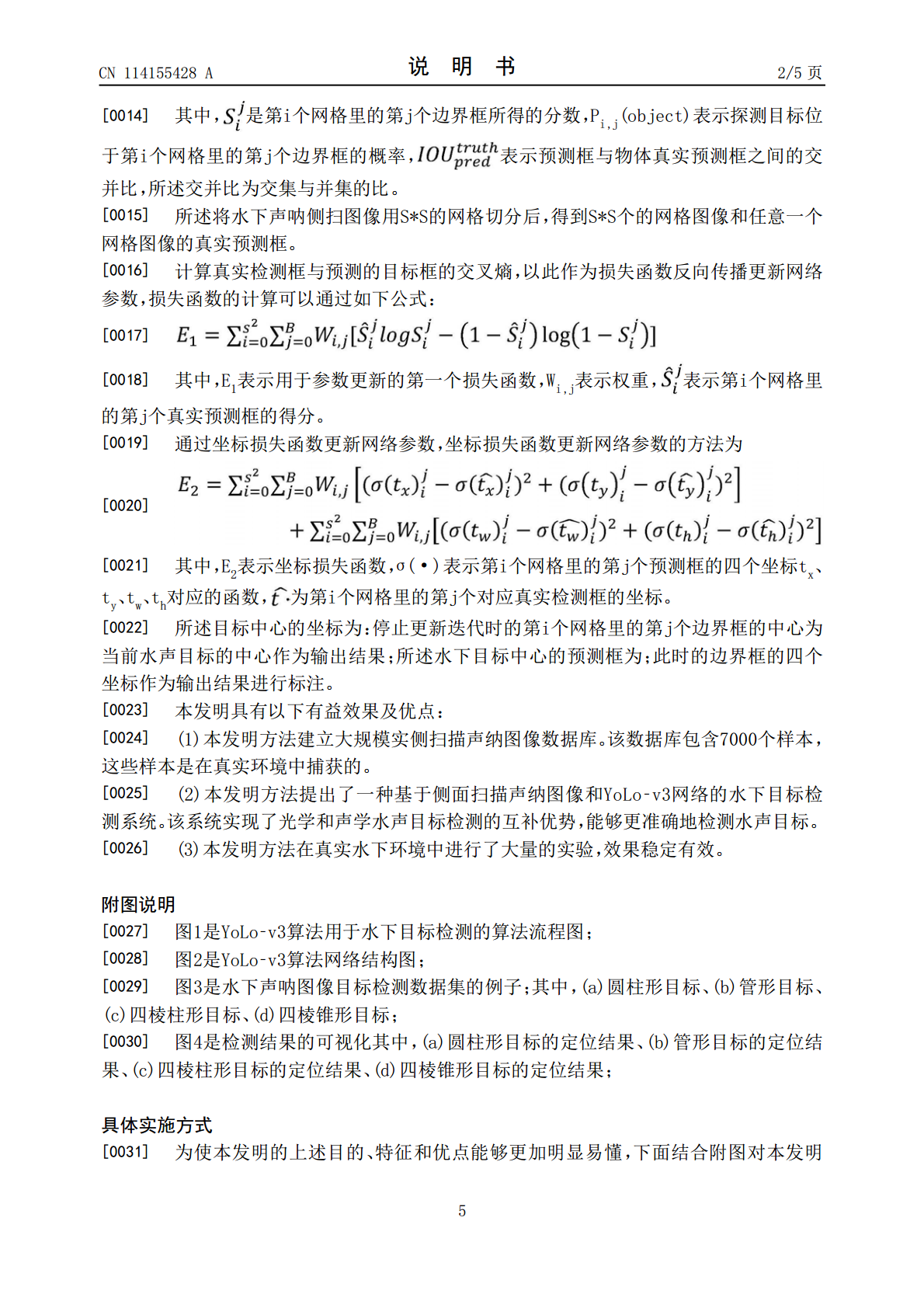
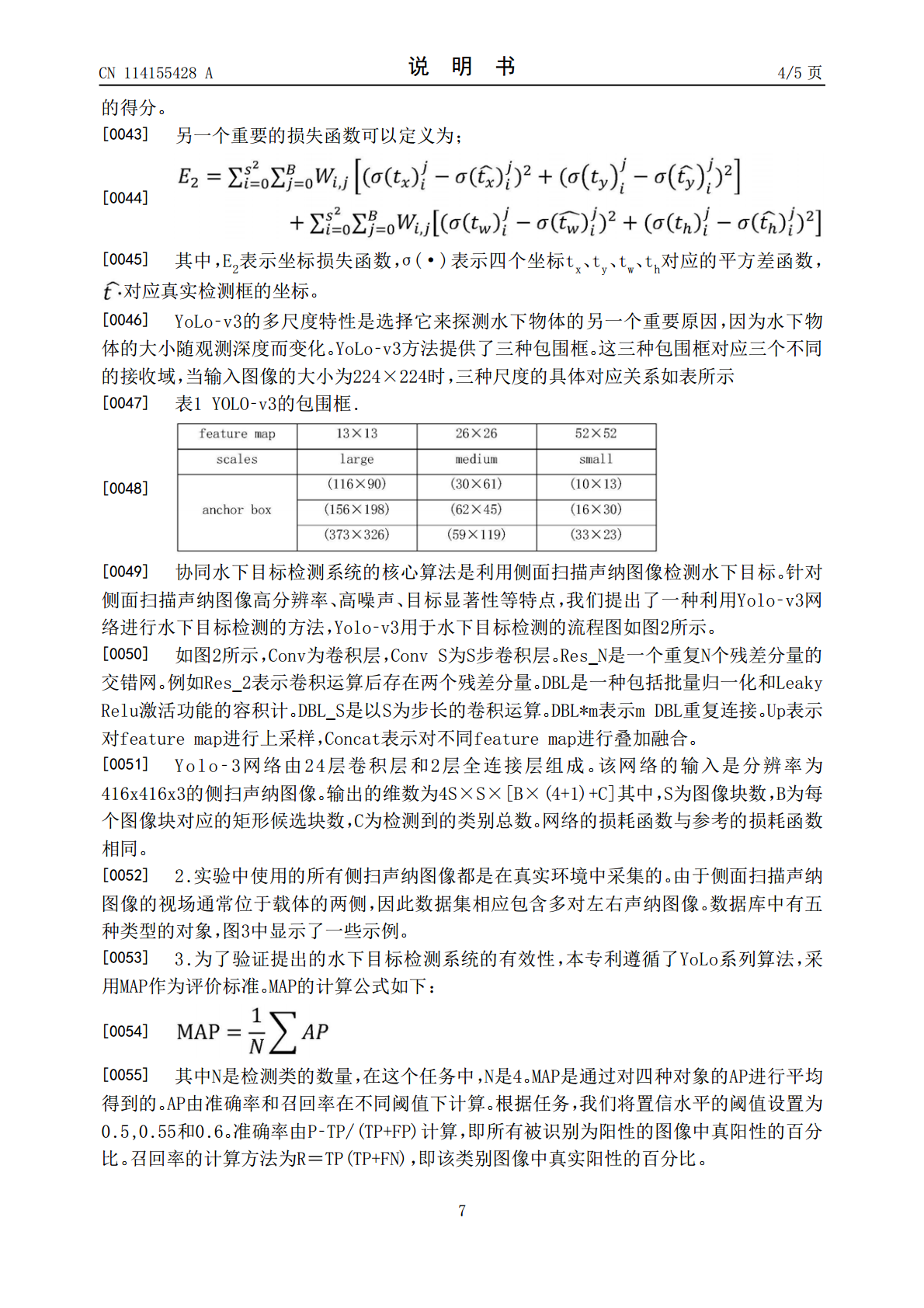
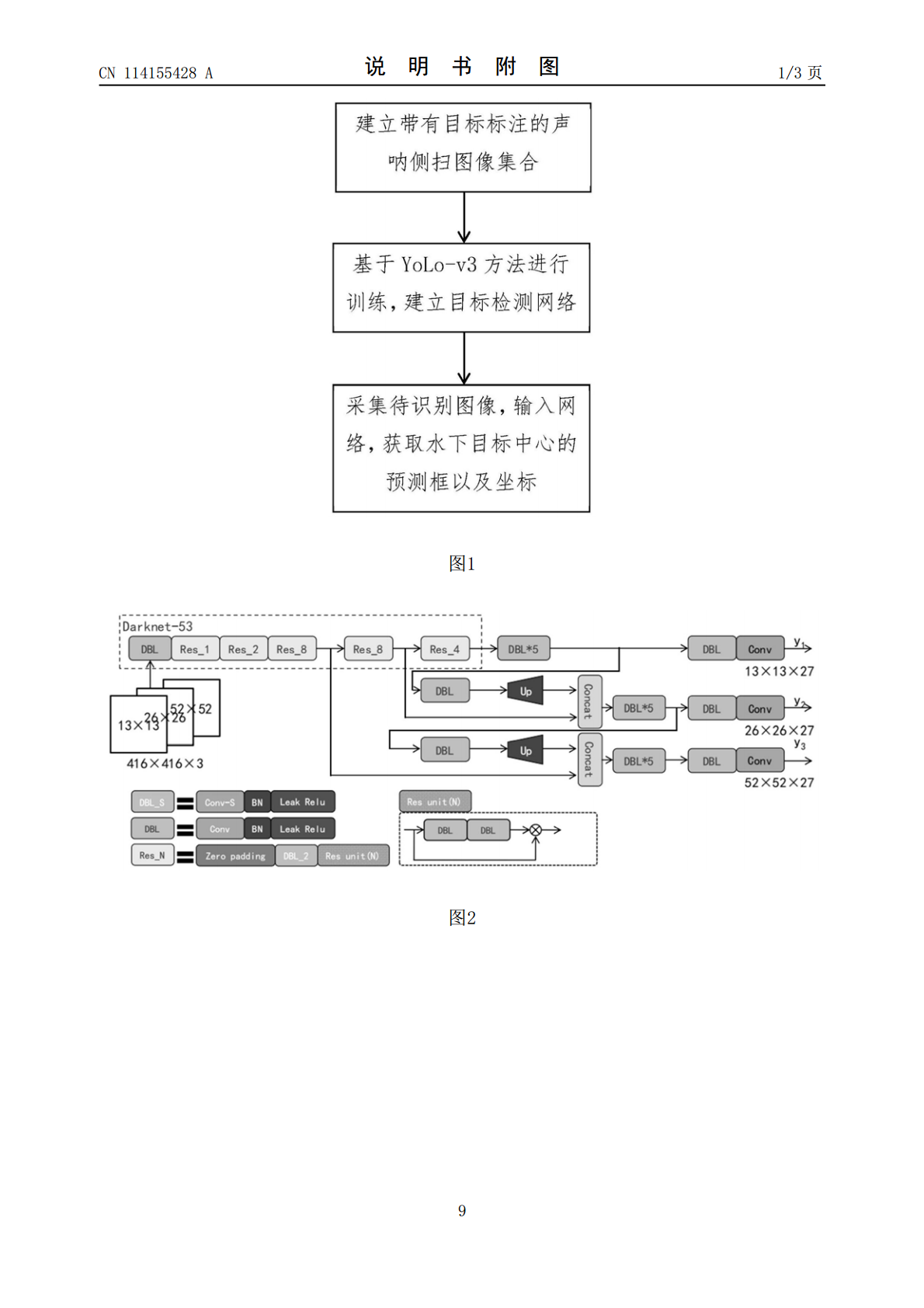
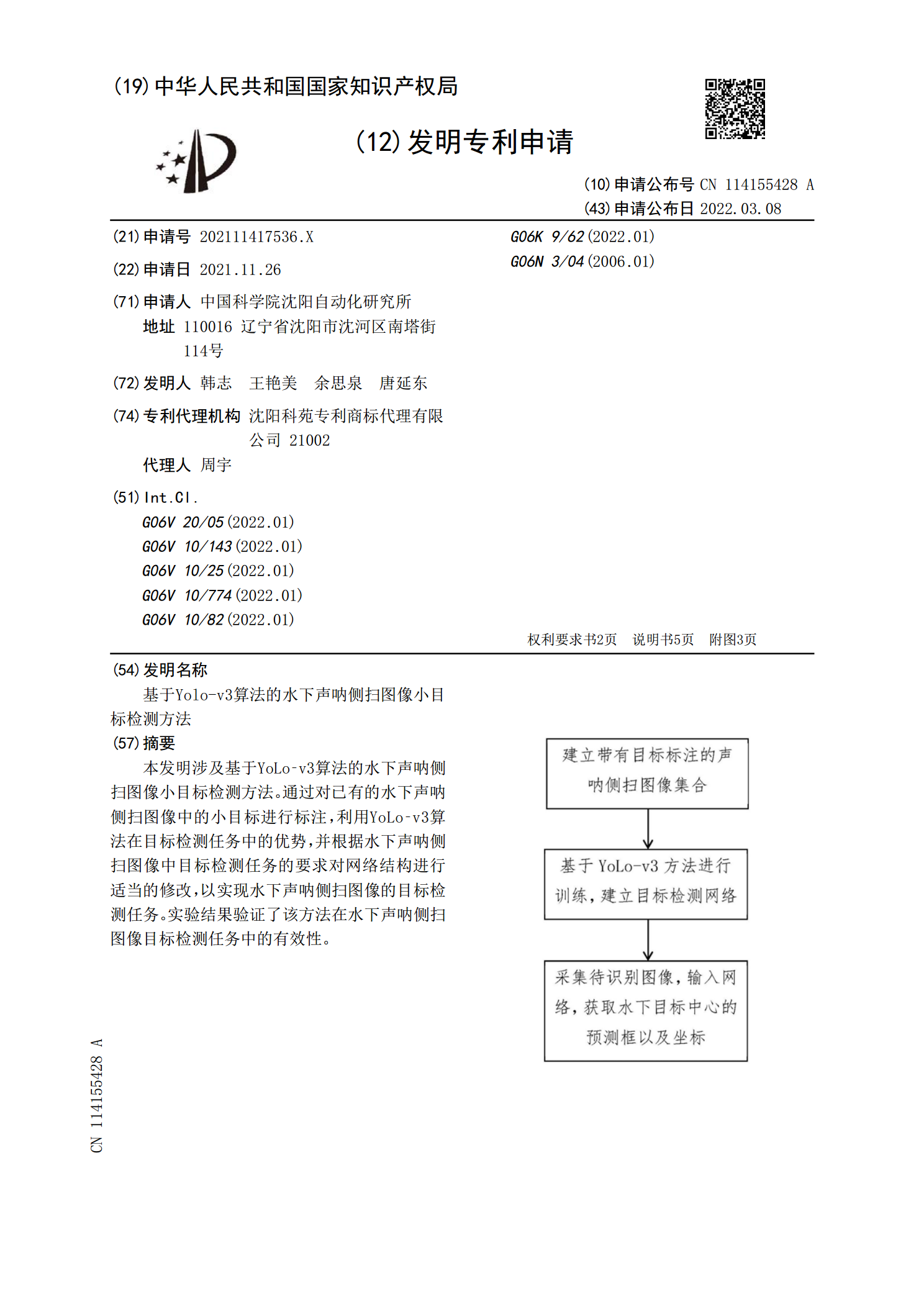
本发明涉及基于YoLo‑v3算法的水下声呐侧扫图像小目标检测方法。通过对已有的水下声呐侧扫图像中的小目标进行标注,利用YoLo‑v3算法在目标检测任务中的优势,并根据水下声呐侧扫图像中目标检测任务的要求对网络结构进行适当的修改,以实现水下声呐侧扫图像的目标检测任务。实验结果验证了该方法在水下声呐侧扫图像目标检测任务中的有效性。
基于声呐图像的AI水下目标检测与定位方法.pdf
本发明涉及基于声呐图像的AI水下目标检测与定位方法,包括如下步骤:对水下目标进行声呐图像数据采集、数据预处理及数据增强,为后续训练测试做准备;对水下目标检测进行训练测试;基于SLAM算法对水下环境进行同步建图并对目标设备进行定位。本发明基于深度学习在水下目标检测识别的成功应用,能够将目标从复杂的海洋环境背景中准确分割出来,此方向必将引领水下目标识别领域的技术突破;同时,深度学习在水下SLAM中的成功应用,也将使自主水下机器人能够更准确地理解所处作业区域的外部环境,从而提升水下作业的自动化水平。
一种基于侧扫声呐的大坝水下裂缝检测方法.pdf
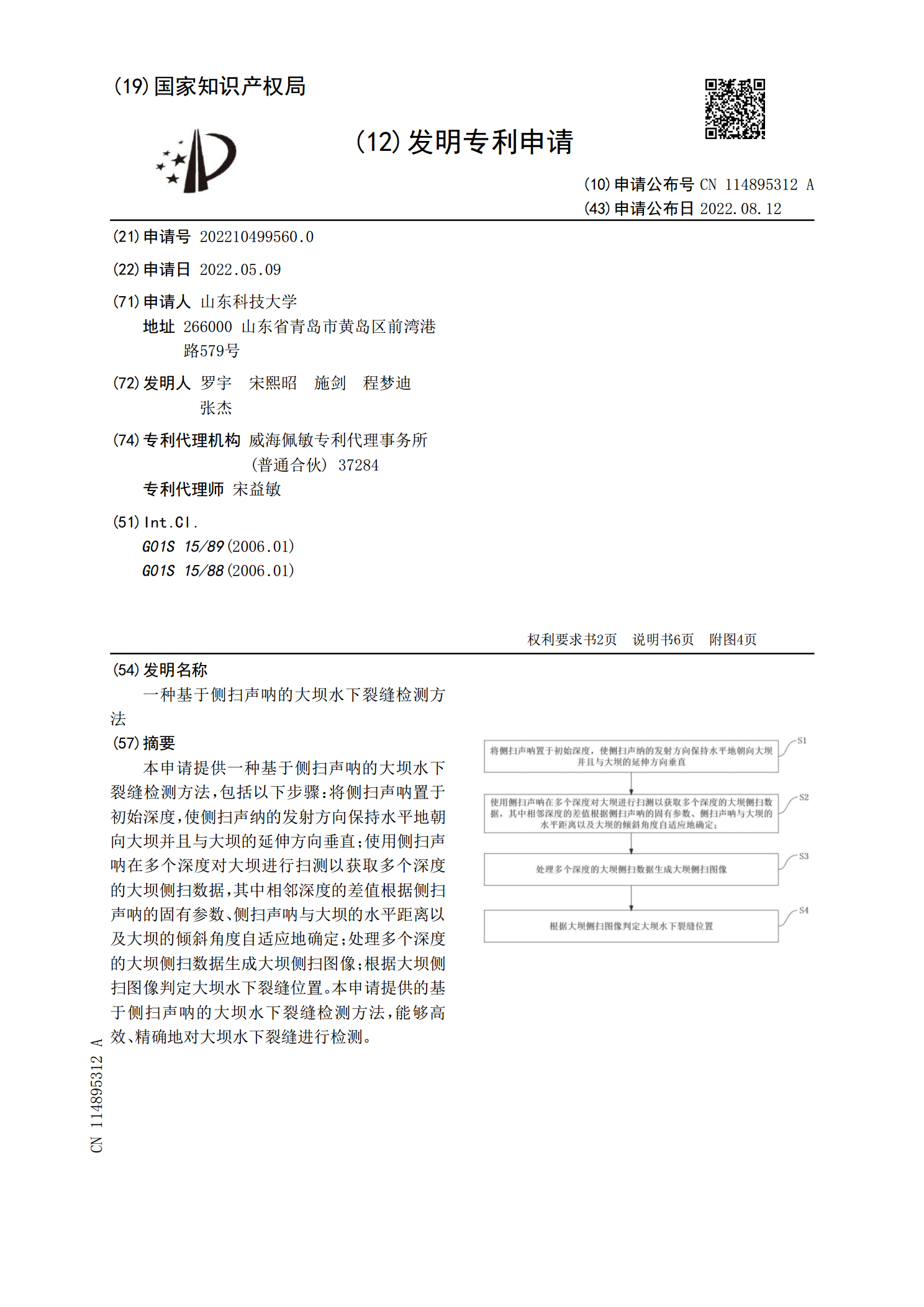
本申请提供一种基于侧扫声呐的大坝水下裂缝检测方法,包括以下步骤:将侧扫声呐置于初始深度,使侧扫声纳的发射方向保持水平地朝向大坝并且与大坝的延伸方向垂直;使用侧扫声呐在多个深度对大坝进行扫测以获取多个深度的大坝侧扫数据,其中相邻深度的差值根据侧扫声呐的固有参数、侧扫声呐与大坝的水平距离以及大坝的倾斜角度自适应地确定;处理多个深度的大坝侧扫数据生成大坝侧扫图像;根据大坝侧扫图像判定大坝水下裂缝位置。本申请提供的基于侧扫声呐的大坝水下裂缝检测方法,能够高效、精确地对大坝水下裂缝进行检测。

一种侧扫声呐图像目标识别方法.pdf
本发明涉及一种侧扫声呐图像目标识别方法,包括:采集连续的侧扫声呐海底图像,获取若干张原始声呐图像,所述原始声呐图像中包含有要识别的目标;将所述原始声呐图像进行灰度二值化处理;对灰度二值化处理后的声呐图像中的噪声进行模型化处理,在多尺度几何变换域对所述声呐图像进行增强;对增强后的声呐图像,利用Canny算子进行边缘检测;根据侧扫方向性图像阈值滤波方法,过滤掉边缘检测后的声呐图像中的非目标边缘,保留检测目标边缘;对边缘检测后的目标进行识别。本发明提供的技术方案,通过在多尺度几何变化域下的图像增强去噪并结合侧扫
一种基于迁移学习与深度学习的侧扫声呐图像目标自动分类方法.pdf
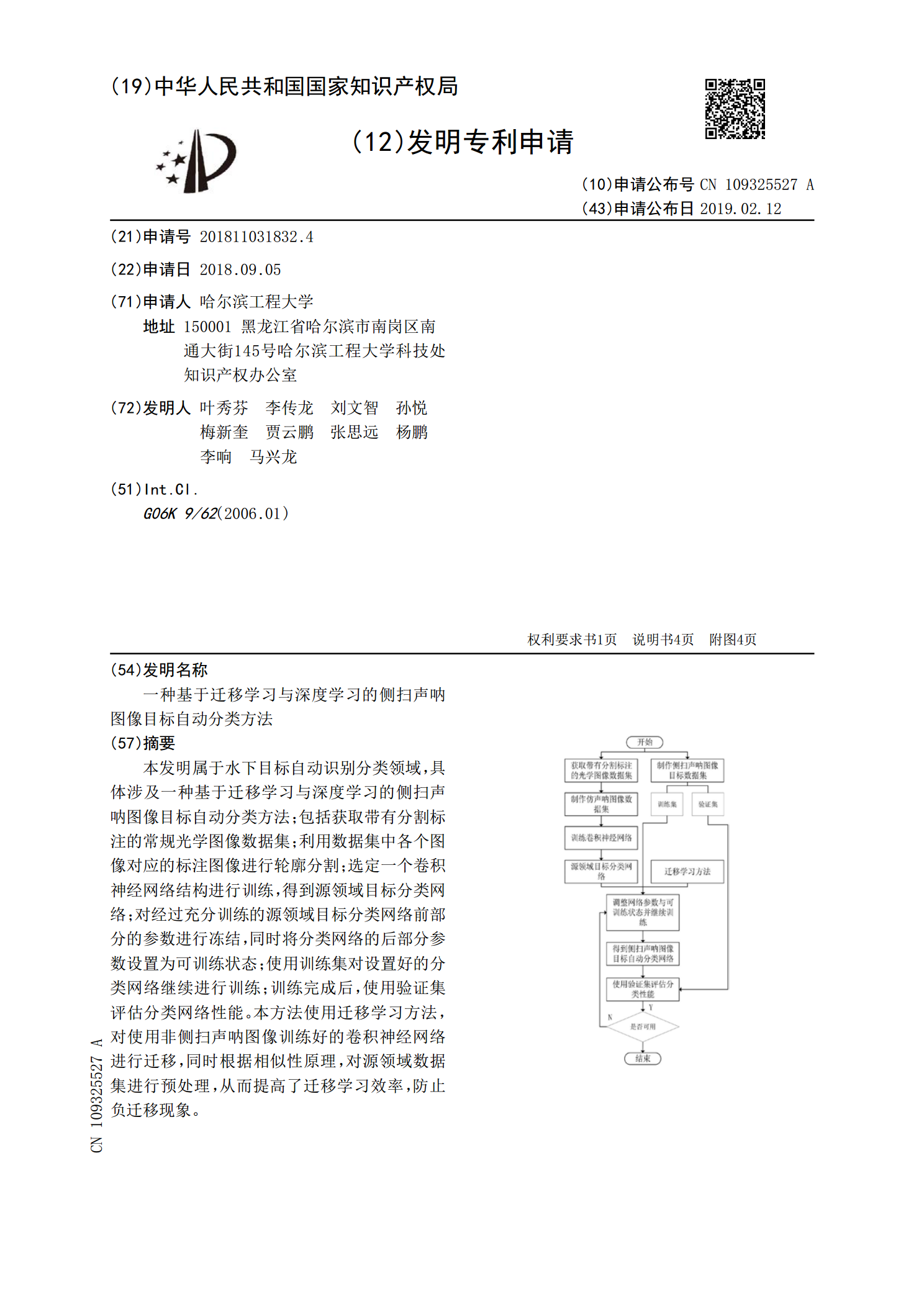
本发明属于水下目标自动识别分类领域,具体涉及一种基于迁移学习与深度学习的侧扫声呐图像目标自动分类方法;包括获取带有分割标注的常规光学图像数据集;利用数据集中各个图像对应的标注图像进行轮廓分割;选定一个卷积神经网络结构进行训练,得到源领域目标分类网络;对经过充分训练的源领域目标分类网络前部分的参数进行冻结,同时将分类网络的后部分参数设置为可训练状态;使用训练集对设置好的分类网络继续进行训练;训练完成后,使用验证集评估分类网络性能。本方法使用迁移学习方法,对使用非侧扫声呐图像训练好的卷积神经网络进行迁移,同时