
一种用于无人环卫车的全覆盖路径规划方法.pdf

努力****妙风


1/10
2/10

3/10

4/10

5/10
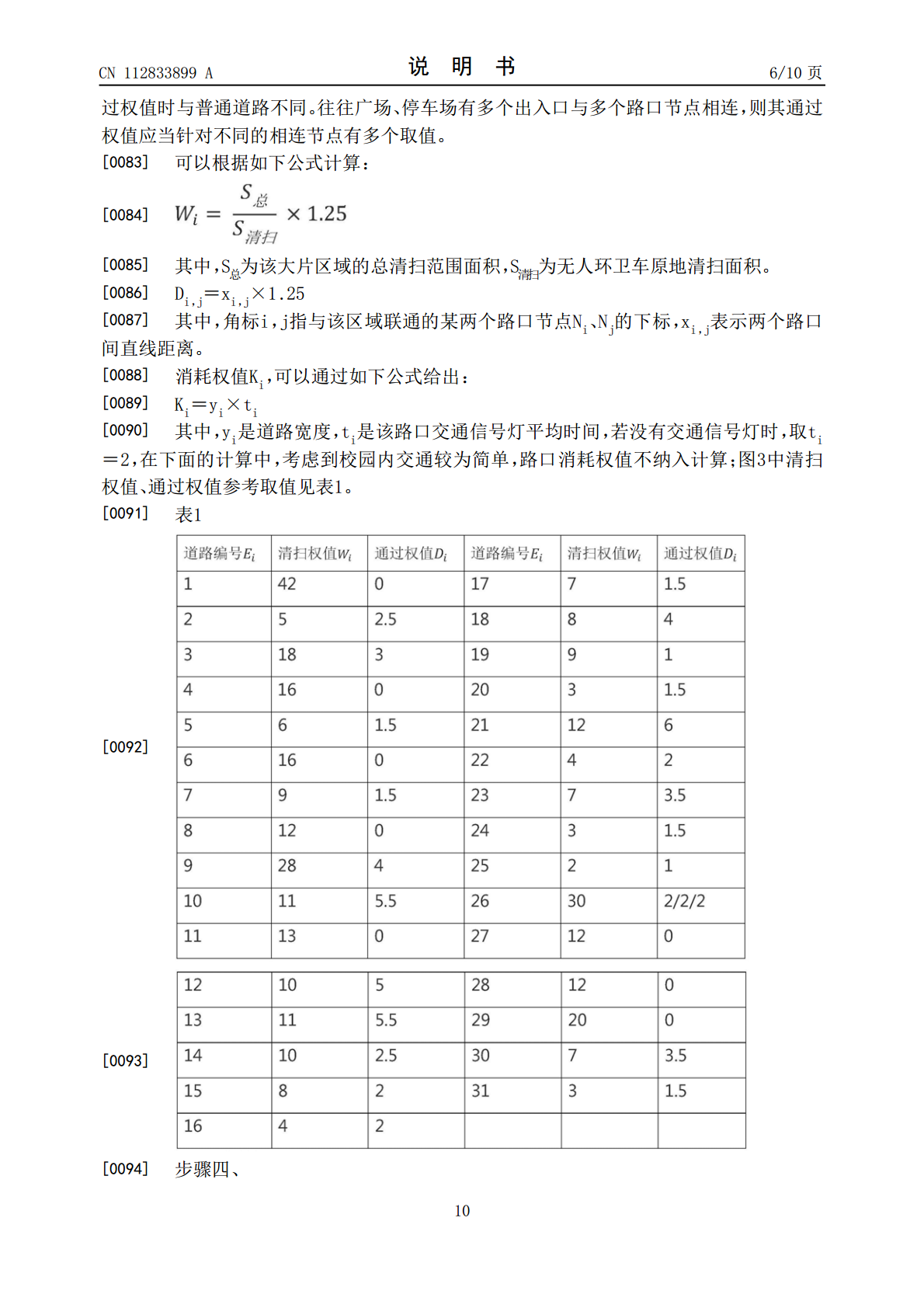
6/10
7/10

8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于无人环卫车的全覆盖路径规划方法.pdf
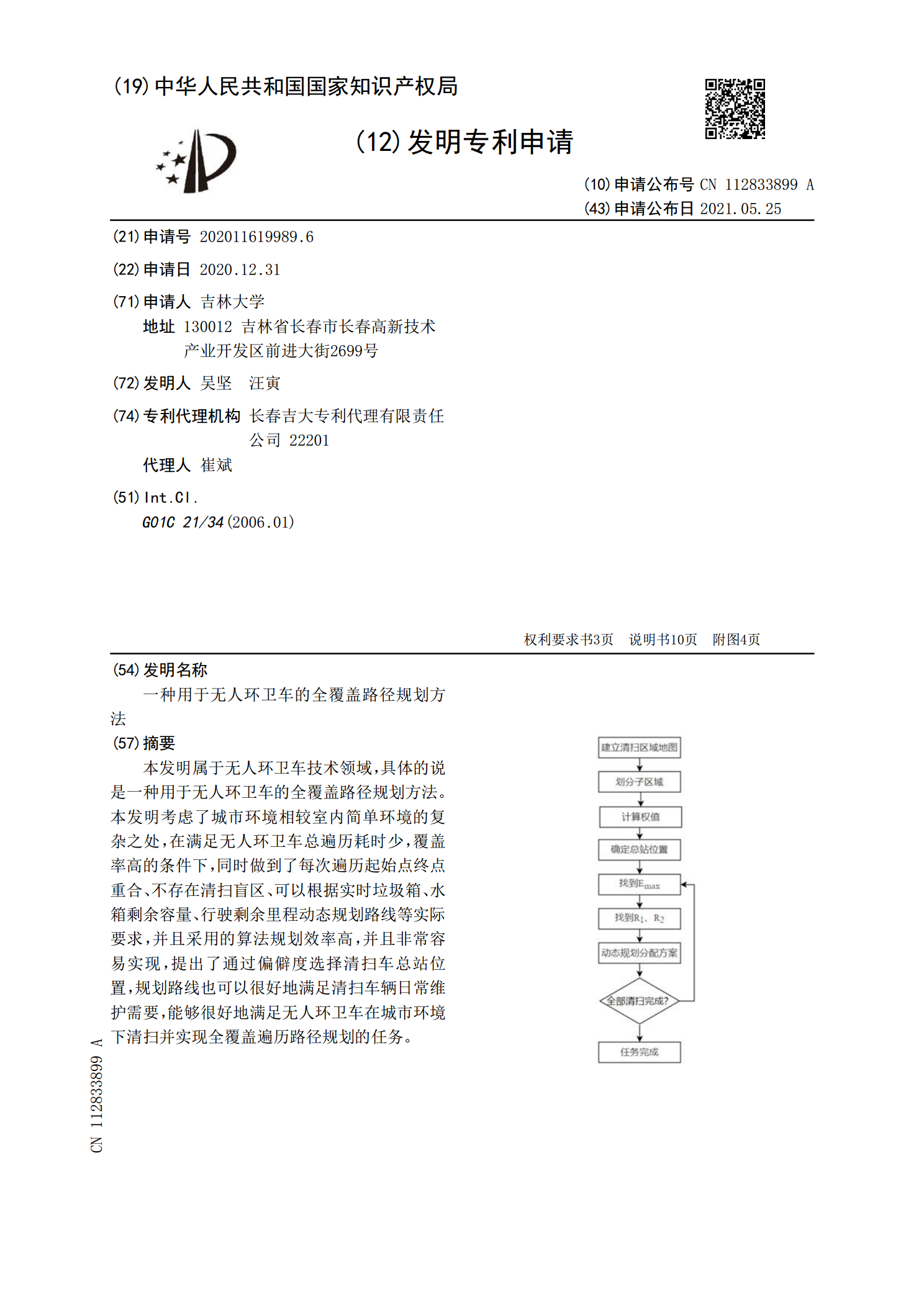
本发明属于无人环卫车技术领域,具体的说是一种用于无人环卫车的全覆盖路径规划方法。本发明考虑了城市环境相较室内简单环境的复杂之处,在满足无人环卫车总遍历耗时少,覆盖率高的条件下,同时做到了每次遍历起始点终点重合、不存在清扫盲区、可以根据实时垃圾箱、水箱剩余容量、行驶剩余里程动态规划路线等实际要求,并且采用的算法规划效率高,并且非常容易实现,提出了通过偏僻度选择清扫车总站位置,规划路线也可以很好地满足清扫车辆日常维护需要,能够很好地满足无人环卫车在城市环境下清扫并实现全覆盖遍历路径规划的任务。

无人农机的全覆盖路径规划方法、装置及电子设备.pdf
本发明公开一种无人农机的全覆盖路径规划方法、装置及电子设备,属于路径规划技术领域,包括:获取工作区域的地形信息和无人农机的工作参数;基于地形信息和工作参数确定无人农机工作的起始点、工作方向、进弯点和出弯点等关键控制点;在确定出关键控制点后,以起始点开始进行直线路径规划,在直线路径规划过程中存在障碍物时,进行避障路径规划,在到达转弯区域时,进行转弯路径规划,直至遍历完整个工作区域后,进行封圈路径规划,完成工作区域的全覆盖路径规划,并将规划的路径存储并发送至控制器,控制无人农机工作。本申请基于计算出的关键控制
一种基于全覆盖路径的植保无人机航线规划方法.pdf
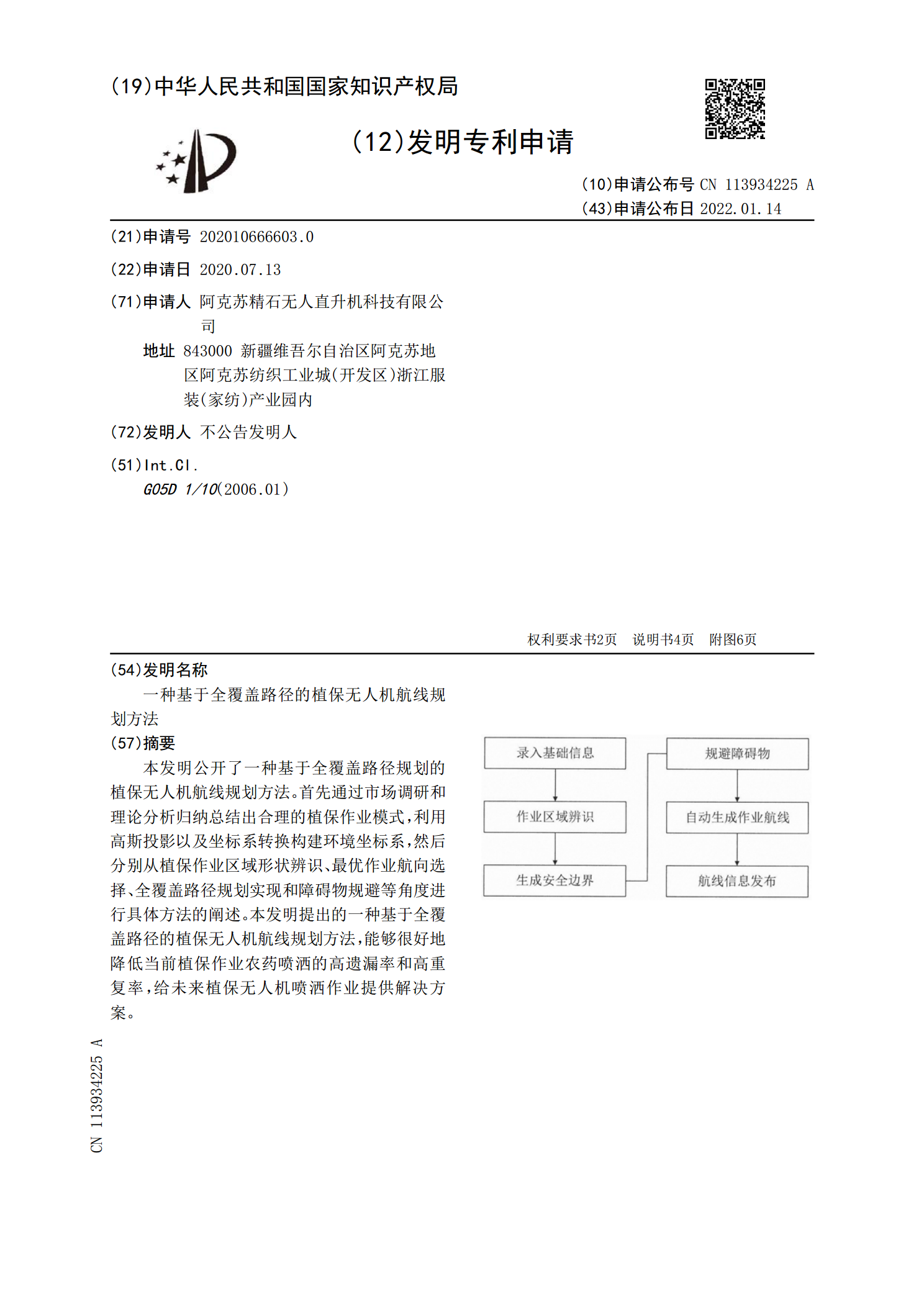
本发明公开了一种基于全覆盖路径规划的植保无人机航线规划方法。首先通过市场调研和理论分析归纳总结出合理的植保作业模式,利用高斯投影以及坐标系转换构建环境坐标系,然后分别从植保作业区域形状辨识、最优作业航向选择、全覆盖路径规划实现和障碍物规避等角度进行具体方法的阐述。本发明提出的一种基于全覆盖路径的植保无人机航线规划方法,能够很好地降低当前植保作业农药喷洒的高遗漏率和高重复率,给未来植保无人机喷洒作业提供解决方案。
路径规划方法及装置、无人车.pdf
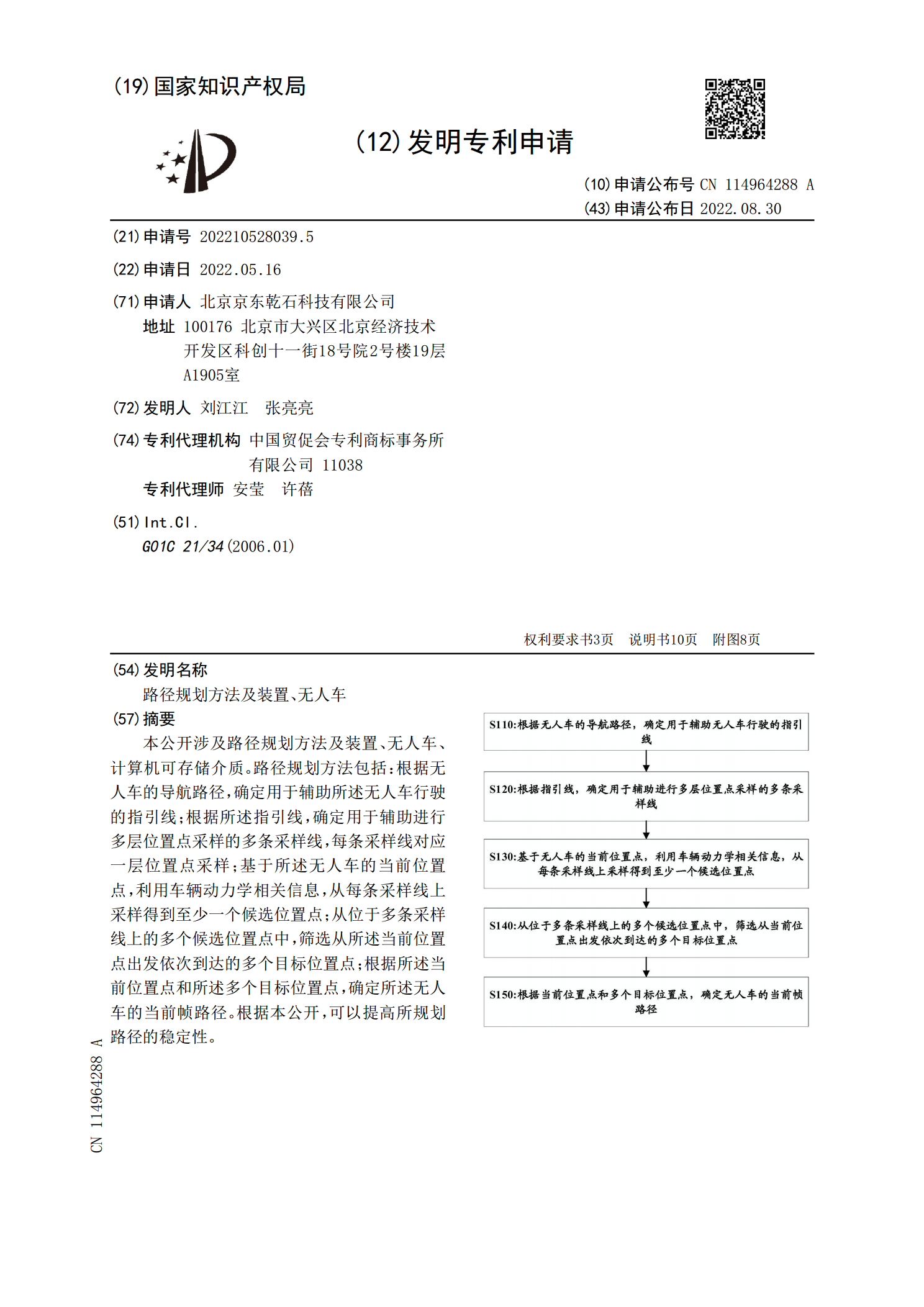
本公开涉及路径规划方法及装置、无人车、计算机可存储介质。路径规划方法包括:根据无人车的导航路径,确定用于辅助所述无人车行驶的指引线;根据所述指引线,确定用于辅助进行多层位置点采样的多条采样线,每条采样线对应一层位置点采样;基于所述无人车的当前位置点,利用车辆动力学相关信息,从每条采样线上采样得到至少一个候选位置点;从位于多条采样线上的多个候选位置点中,筛选从所述当前位置点出发依次到达的多个目标位置点;根据所述当前位置点和所述多个目标位置点,确定所述无人车的当前帧路径。根据本公开,可以提高所规划路径的稳定性

无人船全覆盖路径规划算法研究.docx
无人船全覆盖路径规划算法研究无人船全覆盖路径规划算法研究摘要:无人船在海洋科学研究、海底资源勘探以及海上救援等领域具有重要的应用价值。然而,如何高效地规划无人船的路径,以实现海洋区域的全覆盖,一直是研究人员关注的焦点。本文介绍了无人船全覆盖路径规划算法的研究现状,并分析了各种算法的特点和应用场景。针对不同场景下的无人船全覆盖问题,本文提出了一种基于遗传算法的路径规划算法,并通过实例仿真验证了其有效性和可行性。关键词:无人船、路径规划、全覆盖、遗传算法第一章引言无人船作为一种具有自主控制能力的水面航行器,无