
基于智能控制的水下机器人技术.pdf

文库****品店

1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于智能控制的水下机器人技术.pdf
基于智能控制的水下机器人技术水下机器人是一种使用在水下环境中的机器人。它能够在海洋中寻找和提取矿物,监测海洋环境,协助进行科学研究,甚至探测水下物体。水下机器人的发展是水下探测技术的一个重要分支,其中智能控制技术的应用在控制和制造水下机器人方面有着重要的意义。智能控制技术是指采用各种智能技术和控制方法来处理复杂的、不确定的和非线性的控制问题,以达到良好的控制效果。在水下机器人的应用中,智能控制技术可以用于控制水下机器人的姿态和动力系统,提高操作的精确性和成本效益,提升水下机器人的整体运行效率。目前,国内外
一种基于远程智能控制的水下检查机器人.pdf
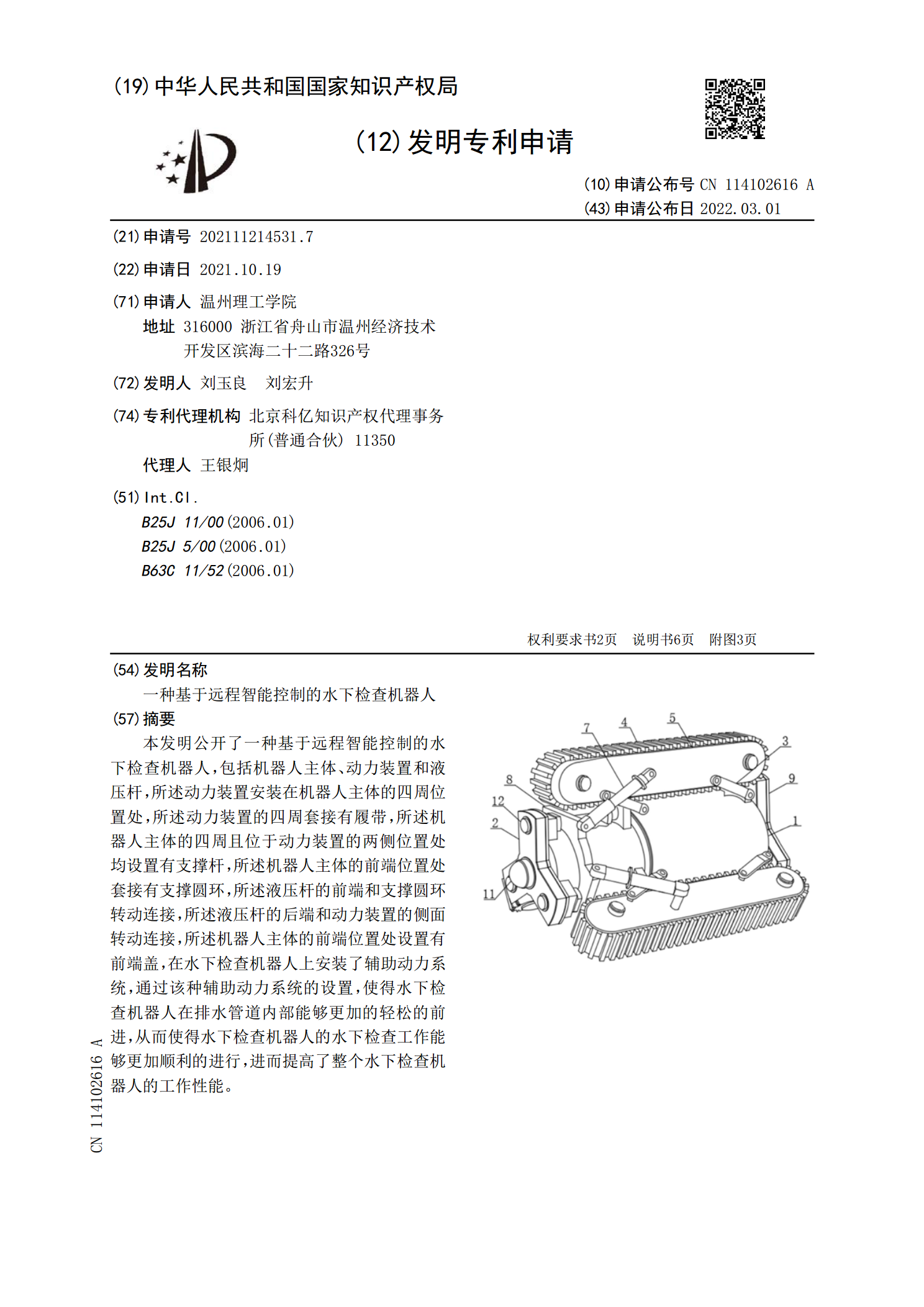
本发明公开了一种基于远程智能控制的水下检查机器人,包括机器人主体、动力装置和液压杆,所述动力装置安装在机器人主体的四周位置处,所述动力装置的四周套接有履带,所述机器人主体的四周且位于动力装置的两侧位置处均设置有支撑杆,所述机器人主体的前端位置处套接有支撑圆环,所述液压杆的前端和支撑圆环转动连接,所述液压杆的后端和动力装置的侧面转动连接,所述机器人主体的前端位置处设置有前端盖,在水下检查机器人上安装了辅助动力系统,通过该种辅助动力系统的设置,使得水下检查机器人在排水管道内部能够更加的轻松的前进,从而使得水下
一种基于雷达技术的水下救援智能机器人.pdf
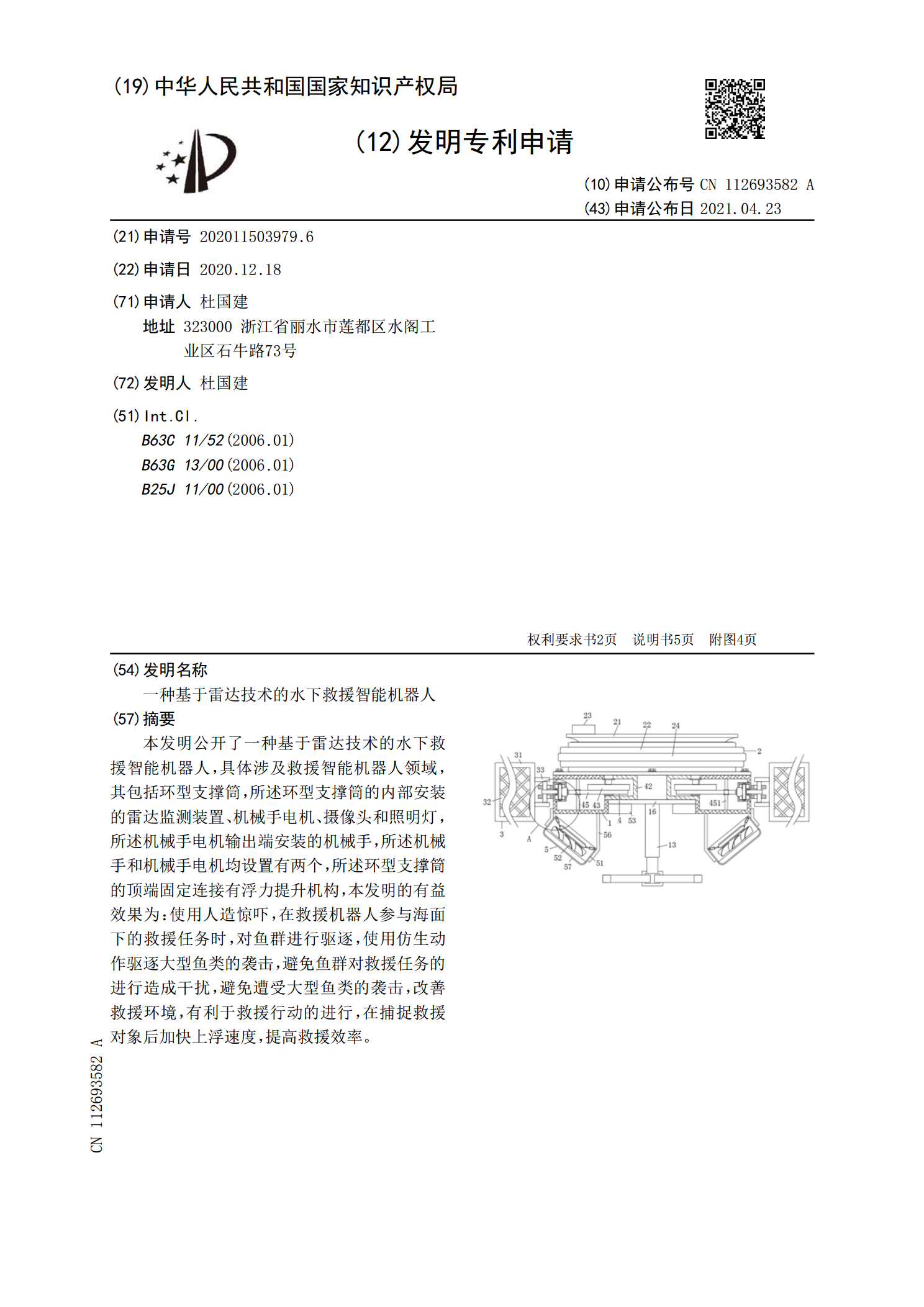
本发明公开了一种基于雷达技术的水下救援智能机器人,具体涉及救援智能机器人领域,其包括环型支撑筒,所述环型支撑筒的内部安装的雷达监测装置、机械手电机、摄像头和照明灯,所述机械手电机输出端安装的机械手,所述机械手和机械手电机均设置有两个,所述环型支撑筒的顶端固定连接有浮力提升机构,本发明的有益效果为:使用人造惊吓,在救援机器人参与海面下的救援任务时,对鱼群进行驱逐,使用仿生动作驱逐大型鱼类的袭击,避免鱼群对救援任务的进行造成干扰,避免遭受大型鱼类的袭击,改善救援环境,有利于救援行动的进行,在捕捉救援对象后加快
基于传感网络的水下机器人控制系统.pdf
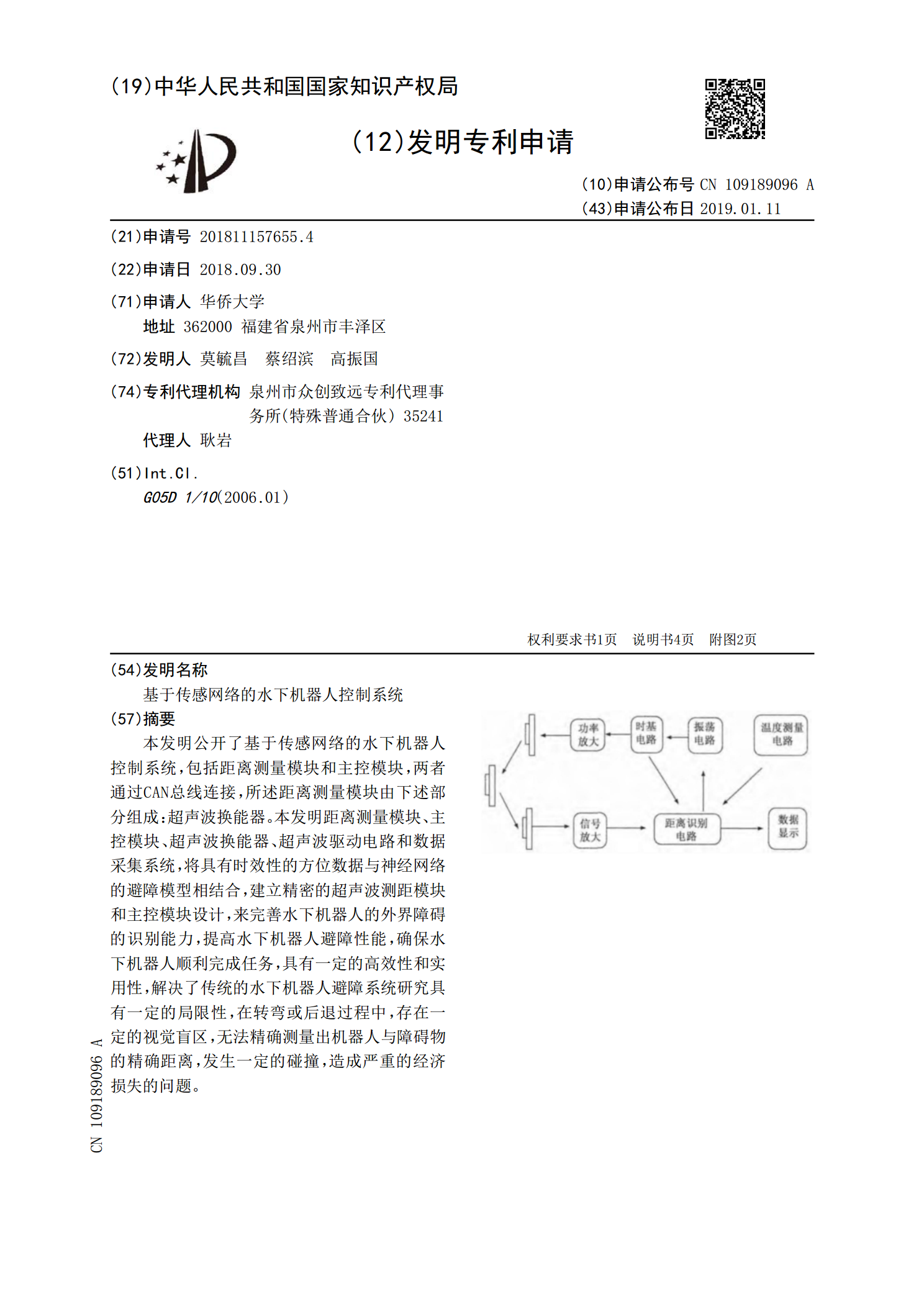
本发明公开了基于传感网络的水下机器人控制系统,包括距离测量模块和主控模块,两者通过CAN总线连接,所述距离测量模块由下述部分组成:超声波换能器。本发明距离测量模块、主控模块、超声波换能器、超声波驱动电路和数据采集系统,将具有时效性的方位数据与神经网络的避障模型相结合,建立精密的超声波测距模块和主控模块设计,来完善水下机器人的外界障碍的识别能力,提高水下机器人避障性能,确保水下机器人顺利完成任务,具有一定的高效性和实用性,解决了传统的水下机器人避障系统研究具有一定的局限性,在转弯或后退过程中,存在一定的视觉

控制智能设备的机器人以及基于机器人的智能设备控制系统.pdf
根据本发明的一实施例,提供控制智能设备的机器人,上述控制智能设备的机器人包括:通信部,若设置于智能设备的控制应用程序运行,则通过预先设定的控制协议,运行与上述智能设备的通信;以及控制器,通过机器人行动控制编程工具,生成包括分配于上述智能设备的识别码、地址、指令以及控制值的指令包后,向上述智能设备传输,使上述智能设备通过上述控制应用程序所包含的控制台,运行关于上述指令包的动作。