
基于传感网络的水下机器人控制系统.pdf

一吃****书竹

1/8
2/8
3/8
4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于传感网络的水下机器人控制系统.pdf
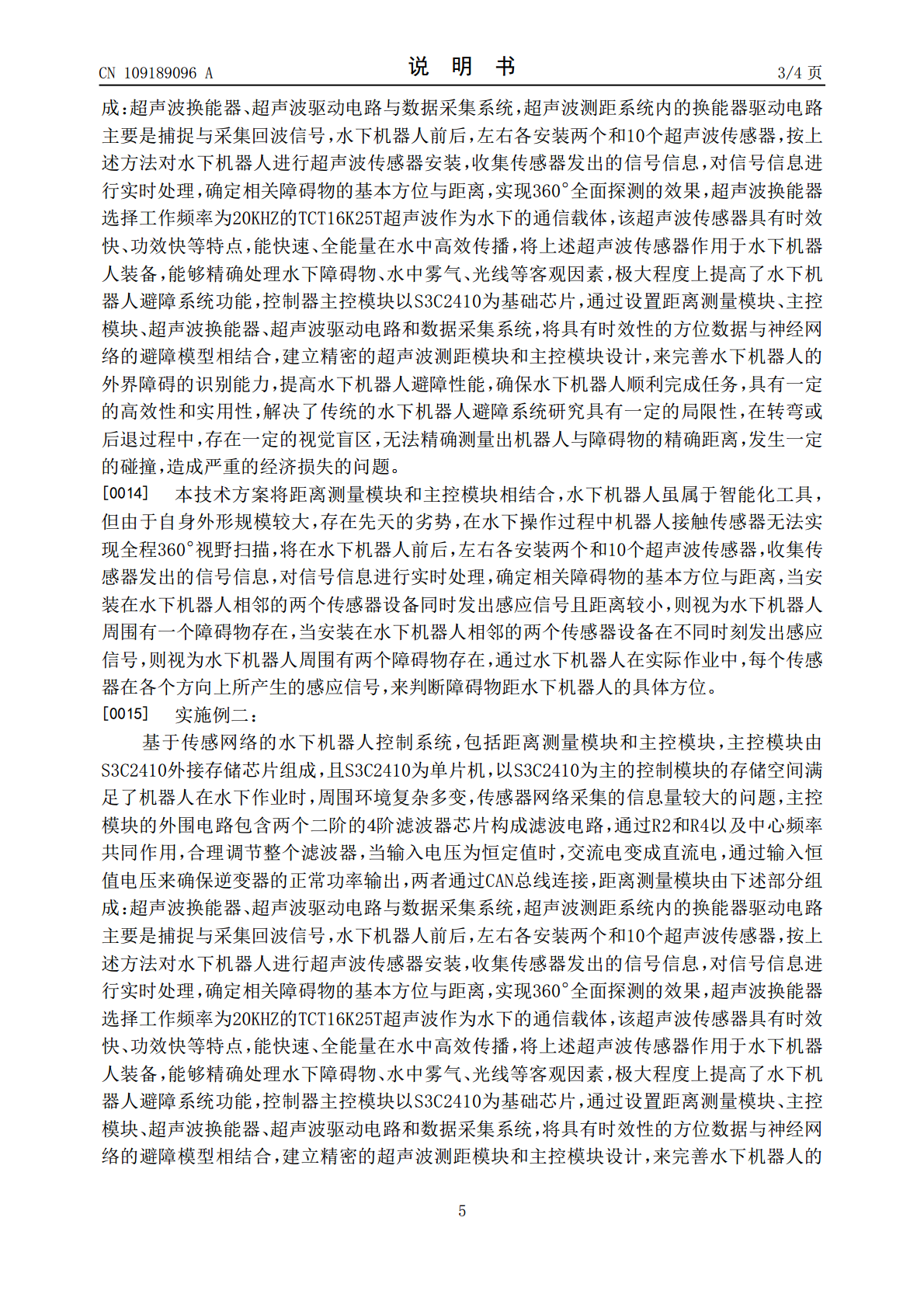
本发明公开了基于传感网络的水下机器人控制系统,包括距离测量模块和主控模块,两者通过CAN总线连接,所述距离测量模块由下述部分组成:超声波换能器。本发明距离测量模块、主控模块、超声波换能器、超声波驱动电路和数据采集系统,将具有时效性的方位数据与神经网络的避障模型相结合,建立精密的超声波测距模块和主控模块设计,来完善水下机器人的外界障碍的识别能力,提高水下机器人避障性能,确保水下机器人顺利完成任务,具有一定的高效性和实用性,解决了传统的水下机器人避障系统研究具有一定的局限性,在转弯或后退过程中,存在一定的视觉

基于无线传感网络的路灯控制系统设计的中期报告.docx
基于无线传感网络的路灯控制系统设计的中期报告一、项目背景路灯作为城市夜间照明的重要设施,对城市建设和社会发展起着重要作用。目前,传统的路灯控制方式存在一些问题,如灯具的调节范围和精度有限、操作不便、安全隐患等。为了解决这些问题,我们设计了一种基于无线传感网络的路灯控制系统。二、技术方案无线传感网络技术是一种新型的、多节点、分布式传感器网络技术,可以实现无线传感节点之间的通信和数据传输。结合路灯控制功能,我们的方案如下。1.系统架构本系统采用的是基于无线传感网络的分布式控制架构,由多个路灯组成网络,每个路灯

基于UML的水下机器人运动控制系统研究的综述报告.docx
基于UML的水下机器人运动控制系统研究的综述报告随着水下机器人技术的快速发展,其在海洋科学和工业领域中的应用越来越广泛。水下机器人需要通过运动控制系统实现其在水下环境中的运动,从而完成不同的任务。而UML作为一种建模语言,能够帮助水下机器人运动控制系统的设计和开发。本文将对基于UML的水下机器人运动控制系统进行综述。首先,本文将简要介绍UML。UML是一种面向对象的建模语言,能够帮助软件开发人员设计一个系统的不同方面。UML的主要图形包括用例图、类图、时序图、活动图等。这些图形能够帮助开发人员更好地理解系

基于能量高效的水下无线传感器网络MAC协议优化的开题报告.docx
基于能量高效的水下无线传感器网络MAC协议优化的开题报告一、选题背景水下无线传感器网络(UnderwaterWirelessSensorNetwork,UWSN)是一种新兴的网络形态,它将多个水下传感设备连接起来,形成类似于传统因特网的网络结构。它具有网络化、分散化、远距离、深水监测等特点,具有广泛的应用前景,如海洋环境监测、海底地震预测、深海资源勘探等领域。在UWSN中,由于海水介质的特殊性质和信号传输的复杂性,传输能量是限制水下无线传感器网络发展的主要瓶颈之一。为了提高系统的能量利用效率,需针对UWS

基于柱形换能器的水下传感器网络组网协议研究的开题报告.docx
基于柱形换能器的水下传感器网络组网协议研究的开题报告一、选题背景和意义水下传感器网络是指一组在海水或淡水水下工作的传感节点,通过通信和合作完成一些特定任务的集合体。近年来,随着海洋经济的发展和对海洋资源的需求不断增加,水下传感器网络的应用领域不断扩大。海洋环境的恶劣性和海底深度等因素限制了网络通信技术的应用,因此需研究适合水下环境的传感器网络组网协议。柱形换能器是一种经过实测优化的水下声波发射器,能够提供更好的声能紧凑度和更准确的声目标定位效果。本文就基于柱形换能器的水下传感器网络组网协议进行了研究,为实