
线控转向匹配分析与控制策略研究的开题报告.pdf

文库****品店

1/4
2/4
3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

线控转向匹配分析与控制策略研究的开题报告.pdf
线控转向匹配分析与控制策略研究的开题报告一、选题意义及研究背景随着工业自动化水平的不断提高,自动驾驶技术正逐渐成为汽车领域的热点。其中,线控转向技术被广泛应用于工业生产、智能物流等领域,并已经开始在车辆领域进行应用研究。线控转向技术能够通过对车辆的轮胎进行精确控制,提高行驶稳定性和安全性,降低车辆事故风险,优化驾驶体验和交通效率,有助于人类社会的可持续发展。然而,线控转向技术的研究仍面临许多技术难题。首先,不同类型的车辆具有不同的转向曲线和驾驶行为,因此线控转向系统的设计需要针对不同车辆类型进行匹配分析;
线控转向系统和线控转向系统的控制方法.pdf
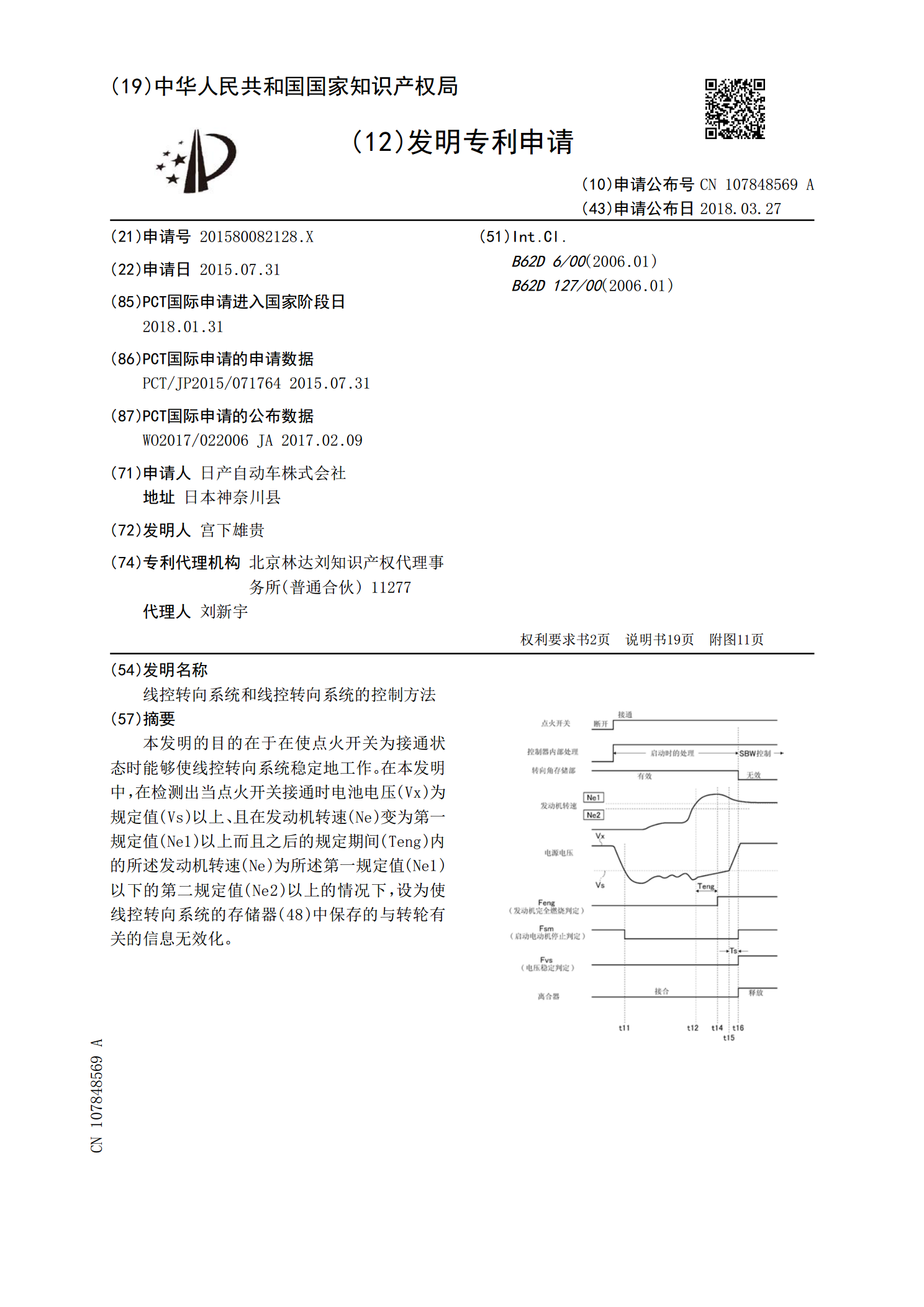
本发明的目的在于在使点火开关为接通状态时能够使线控转向系统稳定地工作。在本发明中,在检测出当点火开关接通时电池电压(Vx)为规定值(Vs)以上、且在发动机转速(Ne)变为第一规定值(Ne1)以上而且之后的规定期间(Teng)内的所述发动机转速(Ne)为所述第一规定值(Ne1)以下的第二规定值(Ne2)以上的情况下,设为使线控转向系统的存储器(48)中保存的与转轮有关的信息无效化。
控制线控转向型转向系统.pdf
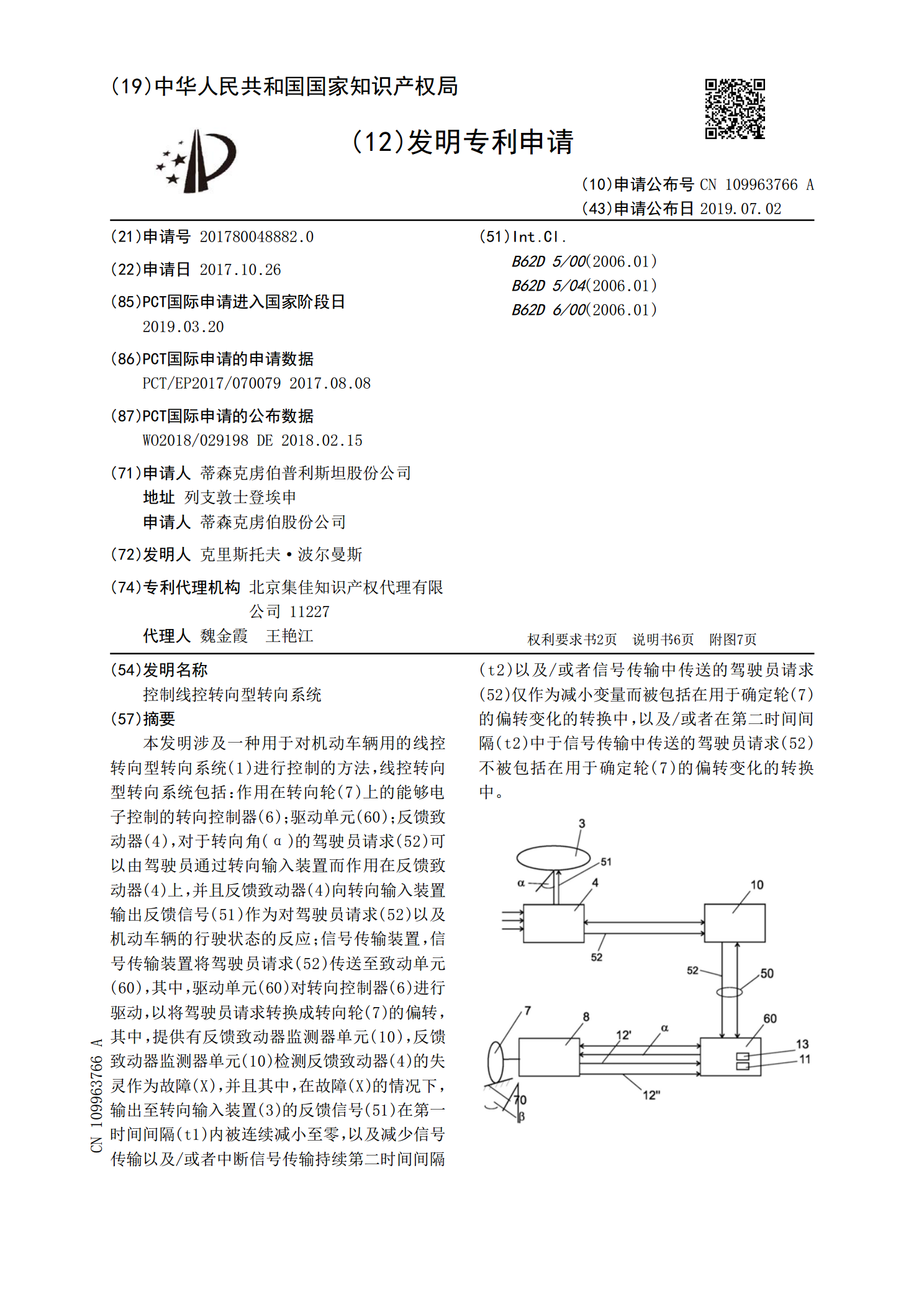
本发明涉及一种用于对机动车辆用的线控转向型转向系统(1)进行控制的方法,线控转向型转向系统包括:作用在转向轮(7)上的能够电子控制的转向控制器(6);驱动单元(60);反馈致动器(4),对于转向角(α)的驾驶员请求(52)可以由驾驶员通过转向输入装置而作用在反馈致动器(4)上,并且反馈致动器(4)向转向输入装置输出反馈信号(51)作为对驾驶员请求(52)以及机动车辆的行驶状态的反应;信号传输装置,信号传输装置将驾驶员请求(52)传送至致动单元(60),其中,驱动单元(60)对转向控制器(6)进行驱动,以将

控制线控转向的转向系统的方法和用于机动车辆的线控转向的转向系统.pdf
本发明涉及控制用于机动车辆的线控转向的转向系统(1)的方法,线控转向的转向系统(1)包括:可电控转向控制器(2),可电控转向控制器(2)作用于转向轮并且检测转向轮的实际转向角(α);反馈致动器,反馈致动器检测利用方向盘设置的目标转向角(β);以及致动单元(4),致动单元(4)根据目标转向角(β)和实际转向角(α)、使用受限扭矩请求信号(PT
线控转向系统的转向控制装置和方法.pdf
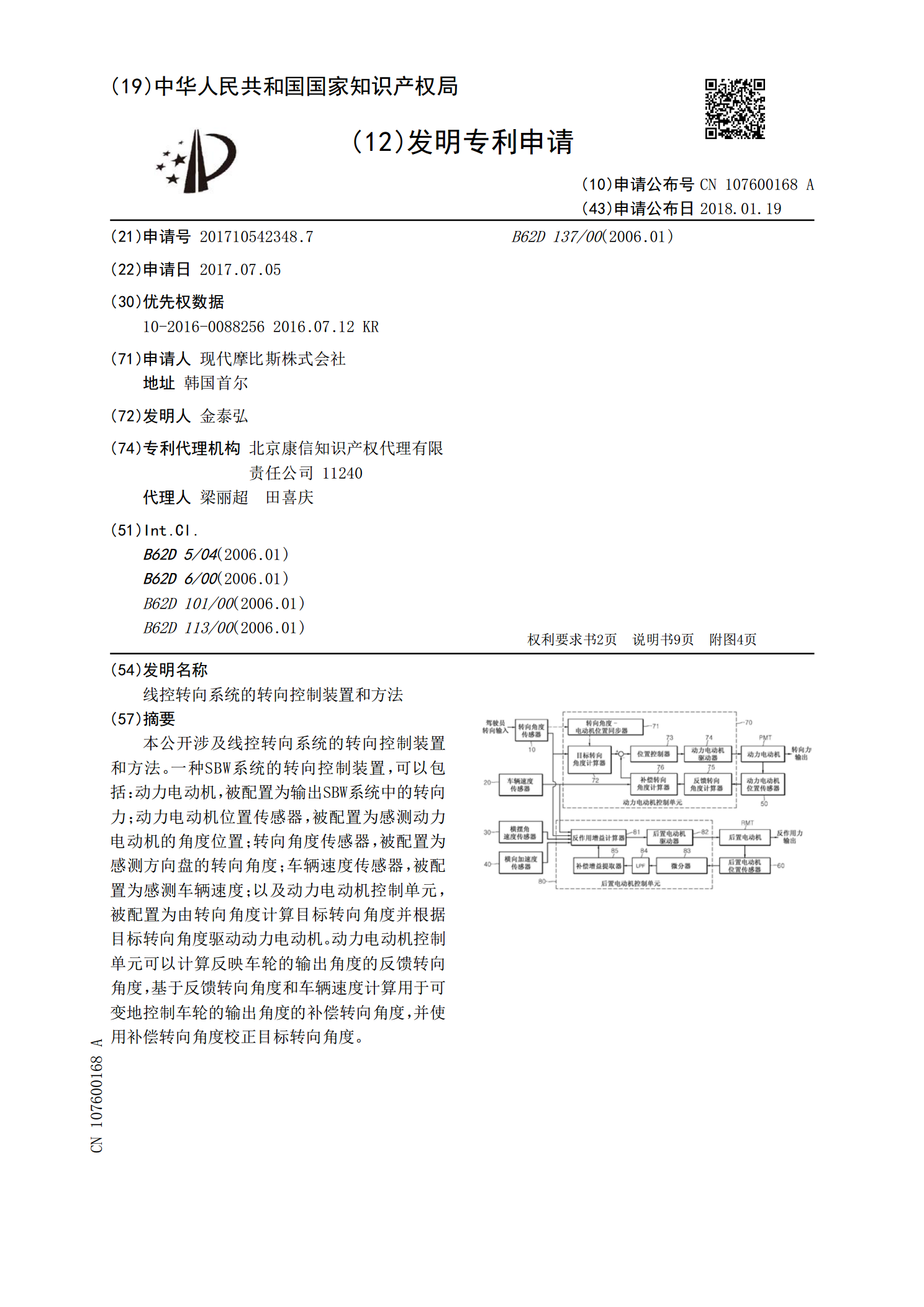
本公开涉及线控转向系统的转向控制装置和方法。一种SBW系统的转向控制装置,可以包括:动力电动机,被配置为输出SBW系统中的转向力;动力电动机位置传感器,被配置为感测动力电动机的角度位置;转向角度传感器,被配置为感测方向盘的转向角度;车辆速度传感器,被配置为感测车辆速度;以及动力电动机控制单元,被配置为由转向角度计算目标转向角度并根据目标转向角度驱动动力电动机。动力电动机控制单元可以计算反映车轮的输出角度的反馈转向角度,基于反馈转向角度和车辆速度计算用于可变地控制车轮的输出角度的补偿转向角度,并使用补偿转向