
一种基于多头两级注意力的三维点云语义分割方法及系统.pdf

春岚****23


1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于多头两级注意力的三维点云语义分割方法及系统.pdf
本发明提出了一种基于多头两级注意力的三维点云语义分割方法及系统,包括:获取植株2D序列图像并进行三维重建,获得植株的3D点云;对植株的3D点云数据进行预处理和手工标注;此外,考虑到植物结构形态的复杂性,基于注意力机制构建了一个多头两级注意力语义分割网络,用于分层地获取点云的几何特征并直接从完整标注的点云数据中预测每点的语义标签,最终得到植株器官的分割结果。本发明提出的一种基于多头两级注意力的三维点云语义分割方法及系统,通过构建语义分割网络,从而在农业领域提出了一种基于数据驱动的端到端,直接处理无序3D点云
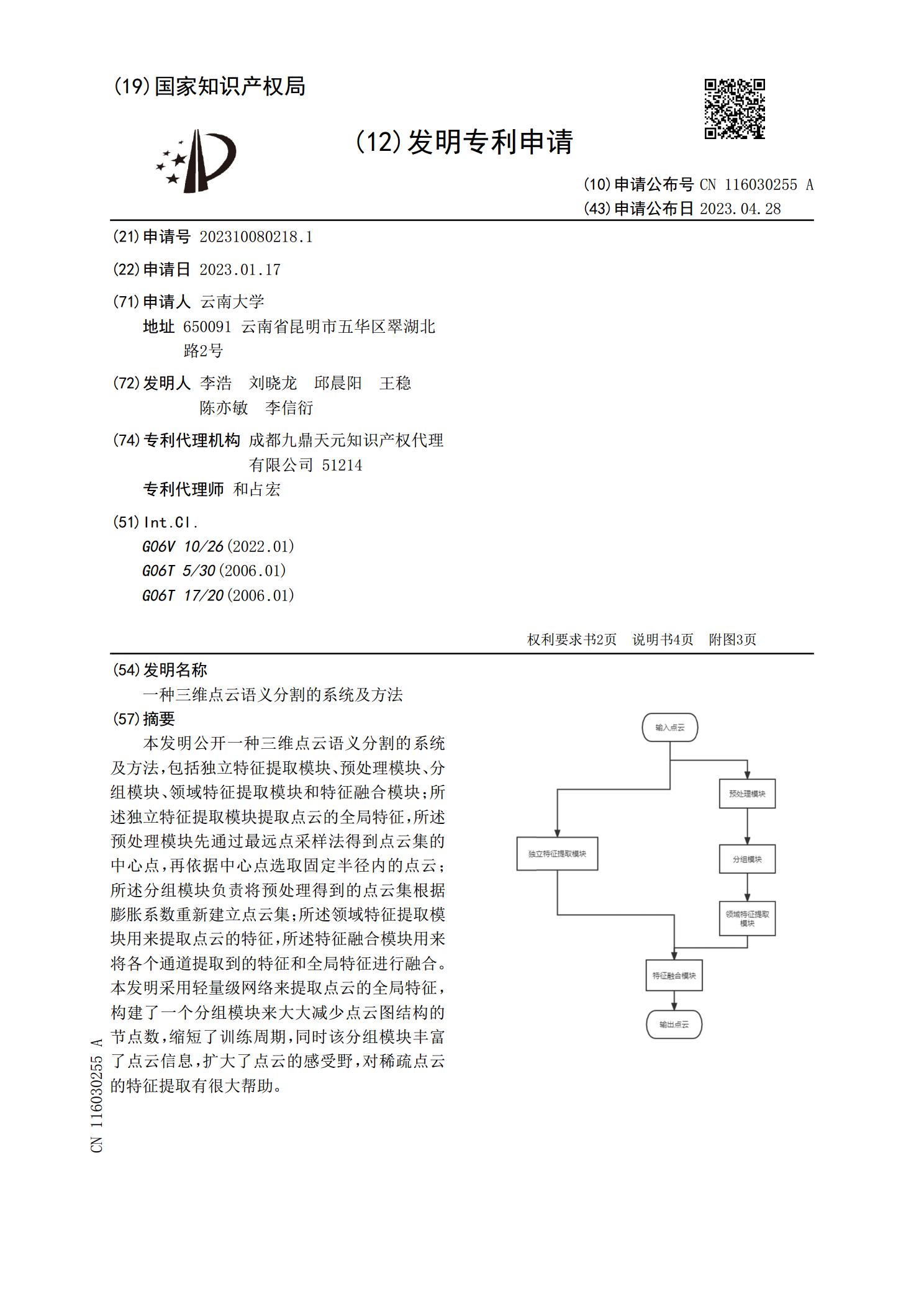
一种三维点云语义分割的系统及方法.pdf
本发明公开一种三维点云语义分割的系统及方法,包括独立特征提取模块、预处理模块、分组模块、领域特征提取模块和特征融合模块;所述独立特征提取模块提取点云的全局特征,所述预处理模块先通过最远点采样法得到点云集的中心点,再依据中心点选取固定半径内的点云;所述分组模块负责将预处理得到的点云集根据膨胀系数重新建立点云集;所述领域特征提取模块用来提取点云的特征,所述特征融合模块用来将各个通道提取到的特征和全局特征进行融合。本发明采用轻量级网络来提取点云的全局特征,构建了一个分组模块来大大减少点云图结构的节点数,缩短了训

一种基于上下文和注意力的三维点云语义分割方法.pdf
本发明提供了一种基于上下文和注意力的三维点云语义分割方法,包括:步骤1,对输入三维点云模型数据集采集数据;步骤2,用关系形状网络对点云数据进行逐点特征提取,得到包含形状信息的点云特征;步骤3,用上下文—注意力模块对提取的点云特征进行类内类间特征约束和强化,得到具备上下文先验和全局语义关联的点云特征;步骤4,采用多层感知机分类器对点云特征进行分类,得到点云数据中每个点的最终预测标签。

一种基于点云数据自动增强的三维点云语义分割方法.pdf
本发明公开了一种基于点云数据自动增强的三维点云语义分割方法。该发明可以进一步增强以PointNet++为代表的点云语义分割算法在不同应用场景下的泛化性能。以往点云语义分割算法通常存在两个问题:一是利用传统的数据增强方法;二是将数据增强与网络训练分为两个阶段。本发明提出的基于点云数据自动增强的三维点云语义分割方法,通过考虑样本的基本几何结构,为每个输入样本回归一个特定的增强函数,同时学习点云样本的形状变换和逐点位移,并联合优化增强函数和优化器,解决网络中输入样本多样性不足的问题,增强网络的泛化能力。

一种基于深度学习的三维点云语义分割方法.pdf
本发明公开了一种基于深度学习的三维点云语义分割方法,包括以下步骤:步骤1、根据先验信息对倾斜摄影软件获取的场景数字正射影像进行初步分类;步骤2、对点云数据进行预处理并进行点云样本的制作;步骤3、点云数据完成预处理与目标分割后,赋予相应的属性,并完成样本集的封装;步骤4、将样本集送入语义分割的神经网络中提取点云的特征,完成模型训练;步骤5、模型训练之后,进行测试,并对测试结果进行可视化,对可视化结果进一步分析,借此,本发明能够直接处理无序点云,并可以提取到点云不同尺度的局部特征,具有可以提高对精细场景的识别