
一种三维点云语义分割的系统及方法.pdf

永香****能手

1/10

2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种三维点云语义分割的系统及方法.pdf
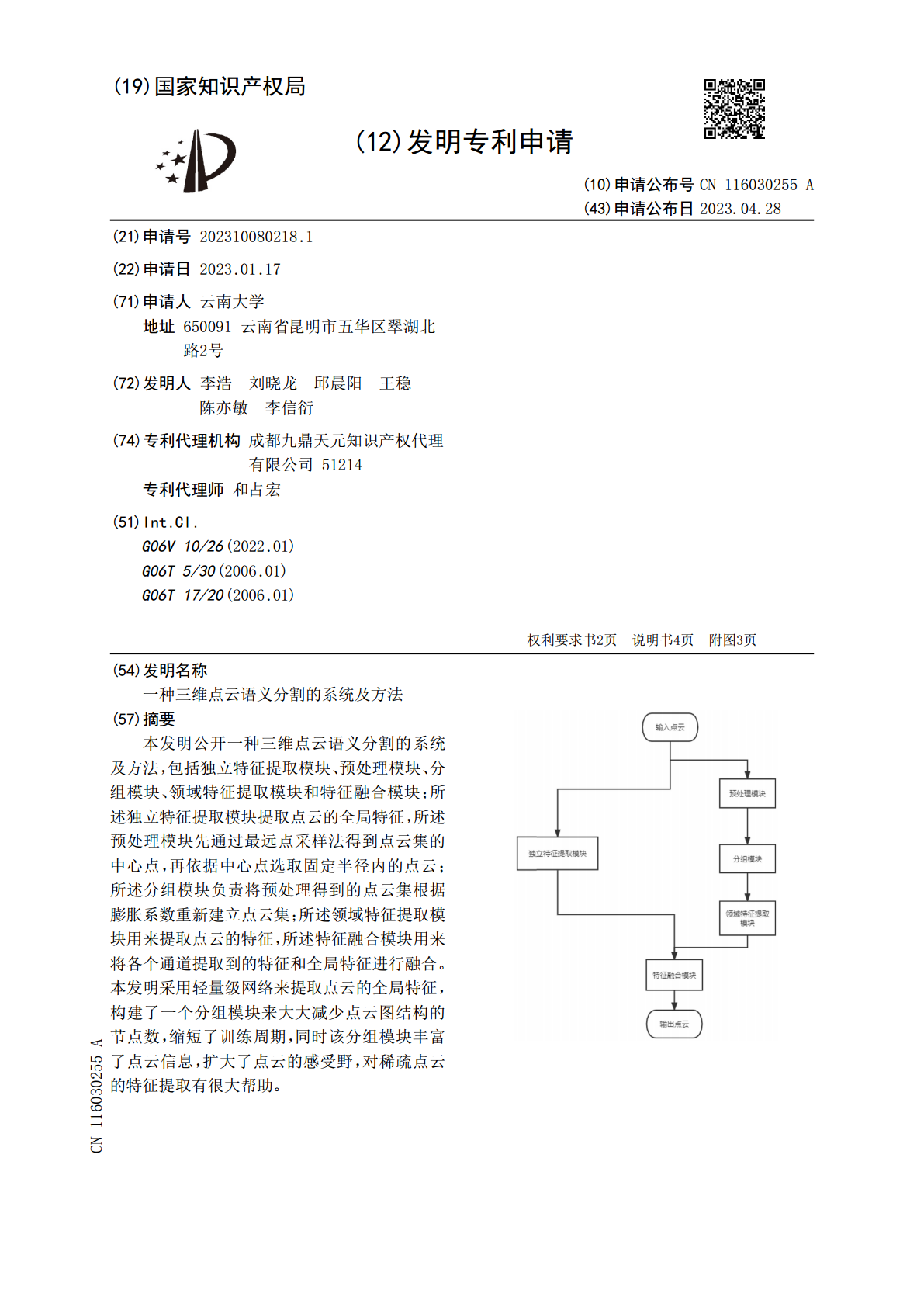
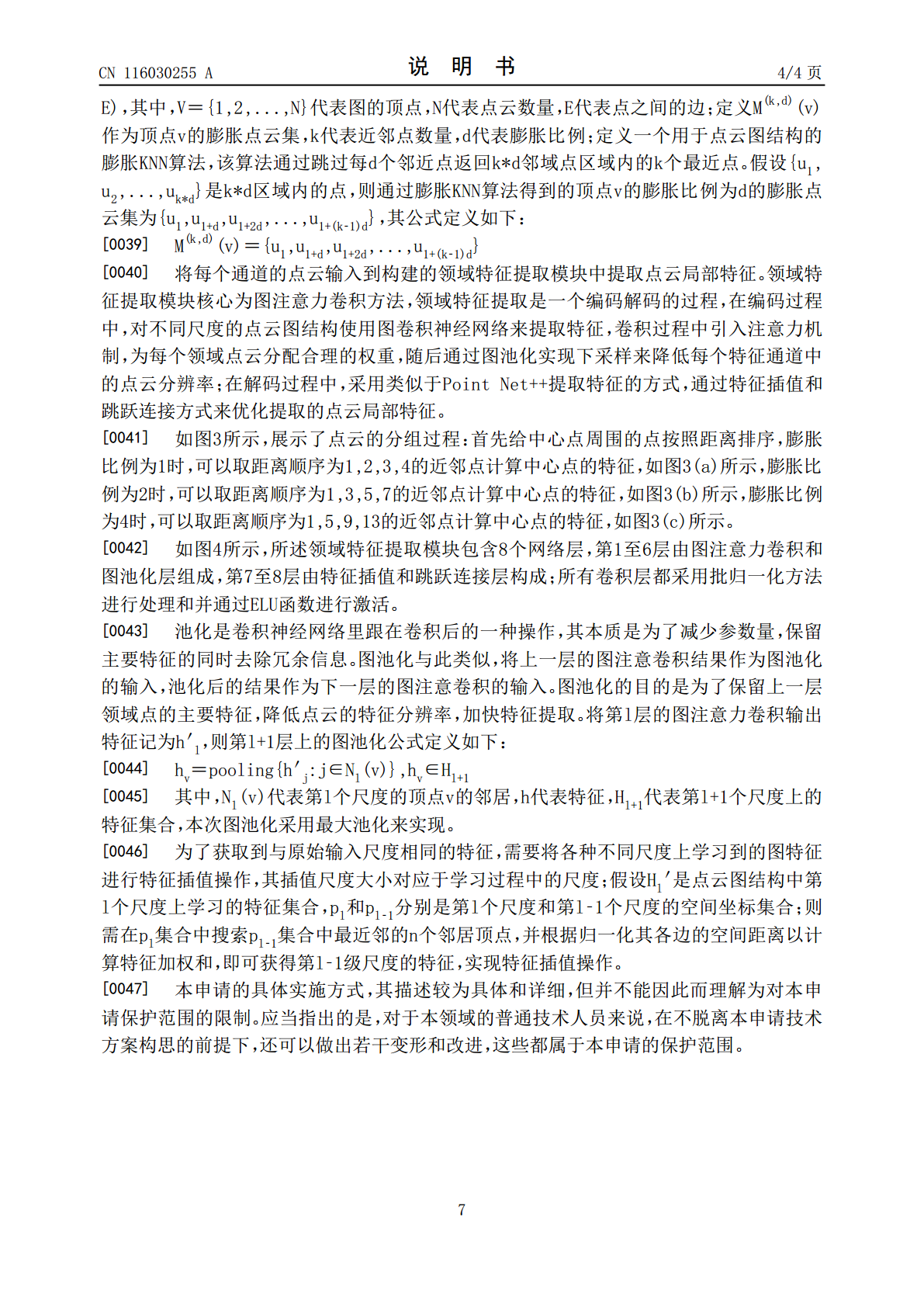
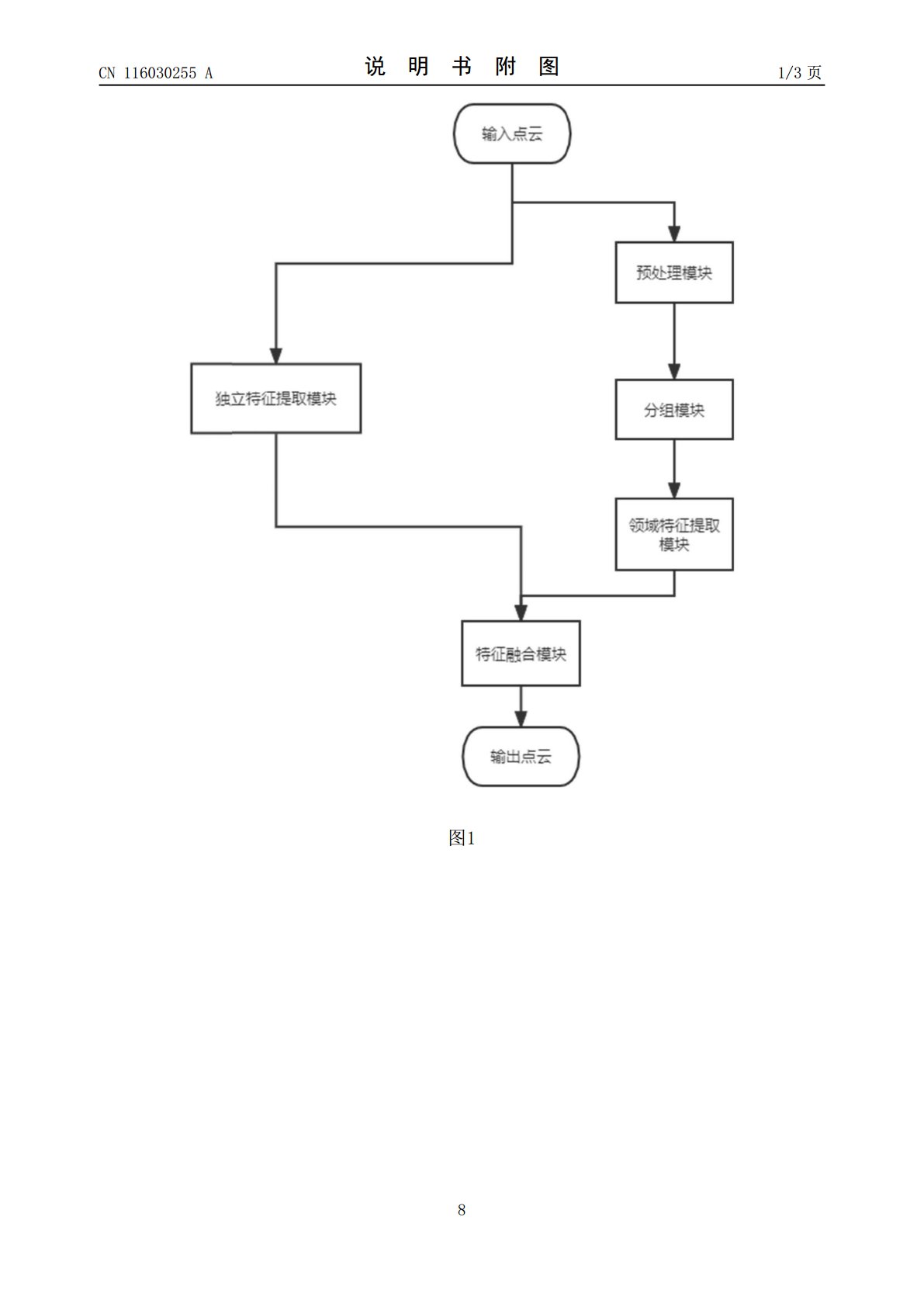
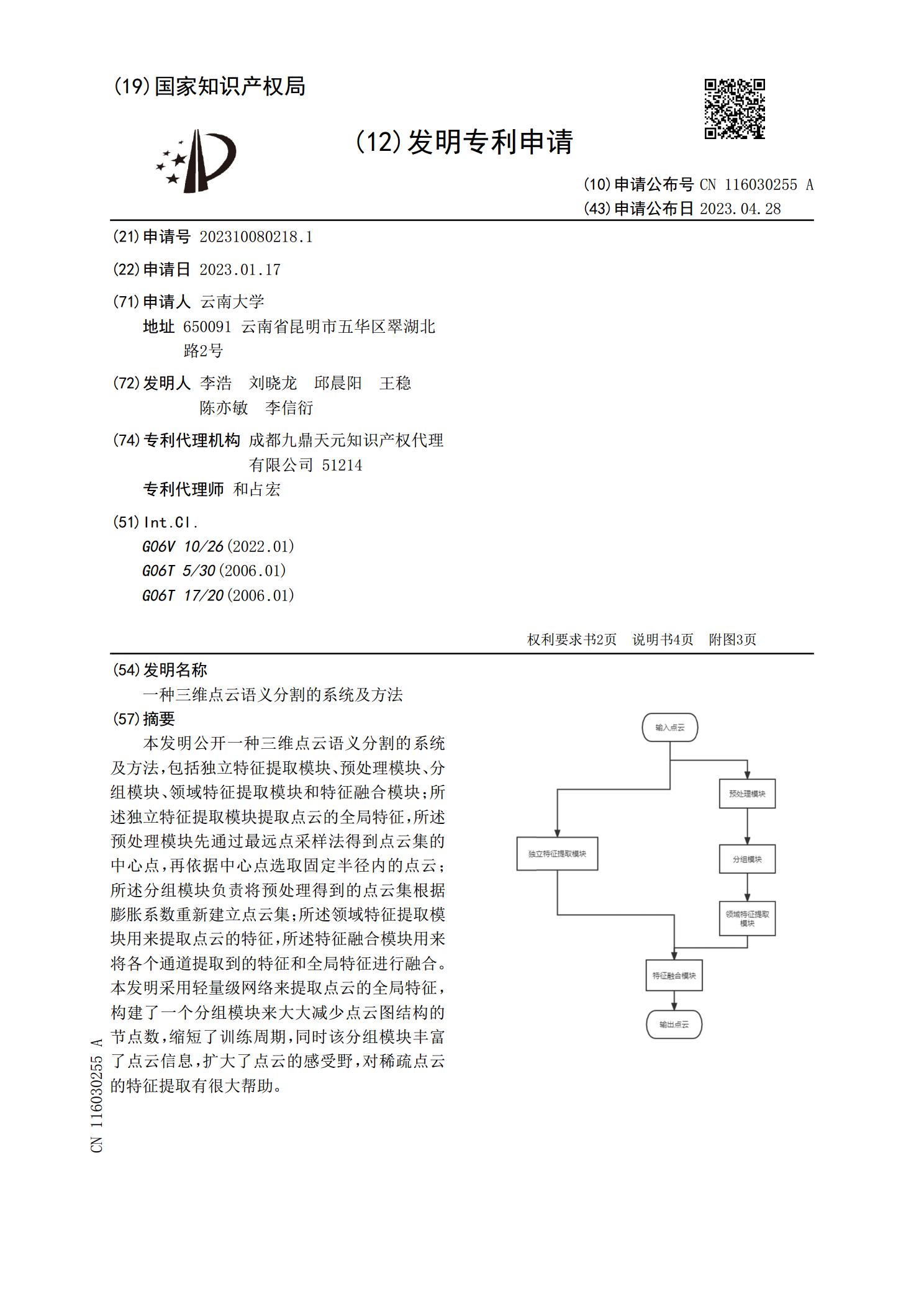
本发明公开一种三维点云语义分割的系统及方法,包括独立特征提取模块、预处理模块、分组模块、领域特征提取模块和特征融合模块;所述独立特征提取模块提取点云的全局特征,所述预处理模块先通过最远点采样法得到点云集的中心点,再依据中心点选取固定半径内的点云;所述分组模块负责将预处理得到的点云集根据膨胀系数重新建立点云集;所述领域特征提取模块用来提取点云的特征,所述特征融合模块用来将各个通道提取到的特征和全局特征进行融合。本发明采用轻量级网络来提取点云的全局特征,构建了一个分组模块来大大减少点云图结构的节点数,缩短了训

一种基于点云数据自动增强的三维点云语义分割方法.pdf
本发明公开了一种基于点云数据自动增强的三维点云语义分割方法。该发明可以进一步增强以PointNet++为代表的点云语义分割算法在不同应用场景下的泛化性能。以往点云语义分割算法通常存在两个问题:一是利用传统的数据增强方法;二是将数据增强与网络训练分为两个阶段。本发明提出的基于点云数据自动增强的三维点云语义分割方法,通过考虑样本的基本几何结构,为每个输入样本回归一个特定的增强函数,同时学习点云样本的形状变换和逐点位移,并联合优化增强函数和优化器,解决网络中输入样本多样性不足的问题,增强网络的泛化能力。

一种基于深度学习的三维点云语义分割方法.pdf
本发明公开了一种基于深度学习的三维点云语义分割方法,包括以下步骤:步骤1、根据先验信息对倾斜摄影软件获取的场景数字正射影像进行初步分类;步骤2、对点云数据进行预处理并进行点云样本的制作;步骤3、点云数据完成预处理与目标分割后,赋予相应的属性,并完成样本集的封装;步骤4、将样本集送入语义分割的神经网络中提取点云的特征,完成模型训练;步骤5、模型训练之后,进行测试,并对测试结果进行可视化,对可视化结果进一步分析,借此,本发明能够直接处理无序点云,并可以提取到点云不同尺度的局部特征,具有可以提高对精细场景的识别

三维点云与RGB的融合与语义分割方法研究.docx
三维点云与RGB的融合与语义分割方法研究标题:三维点云与RGB的融合与语义分割方法研究摘要:随着三维视觉和深度学习的快速发展,融合三维点云与RGB图像的方法在计算机视觉领域引起了广泛关注。本论文主要研究了基于深度学习的三维点云与RGB图像的融合与语义分割方法,旨在提高三维场景的理解能力和语义分析的准确性。我们首先简要介绍了三维点云和RGB图像的基本概念和特点,然后详细阐述了三维点云与RGB图像的融合方法,包括特征融合和数据融合的技术。接着,我们探讨了三维点云与RGB图像的语义分割方法,并介绍了一些主流的深

合并分割块的点云语义分割方法.pptx
汇报人:/目录0102定义和重要性现有方法介绍存在的问题03方法原理具体步骤创新点04数据预处理分割块合并语义信息提取结果评估05实验设置实验结果结果分析与其他方法的比较06优点缺点改进方向07在自动驾驶领域的应用在机器人领域的应用在其他领域的应用前景未来研究方向汇报人: